
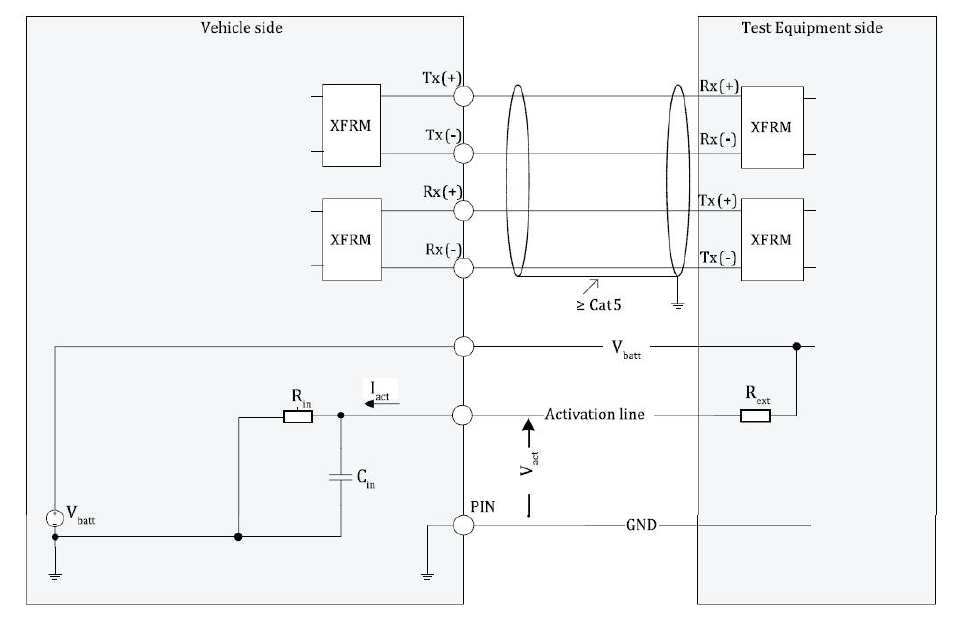
DoIP系統(tǒng)物理層和數(shù)據(jù)鏈路層
DoIP系統(tǒng)物理層和數(shù)據(jù)鏈路層 車載以太網(wǎng)的物理介質(zhì)連接可使用符合IEEE 802.3 100BAS....
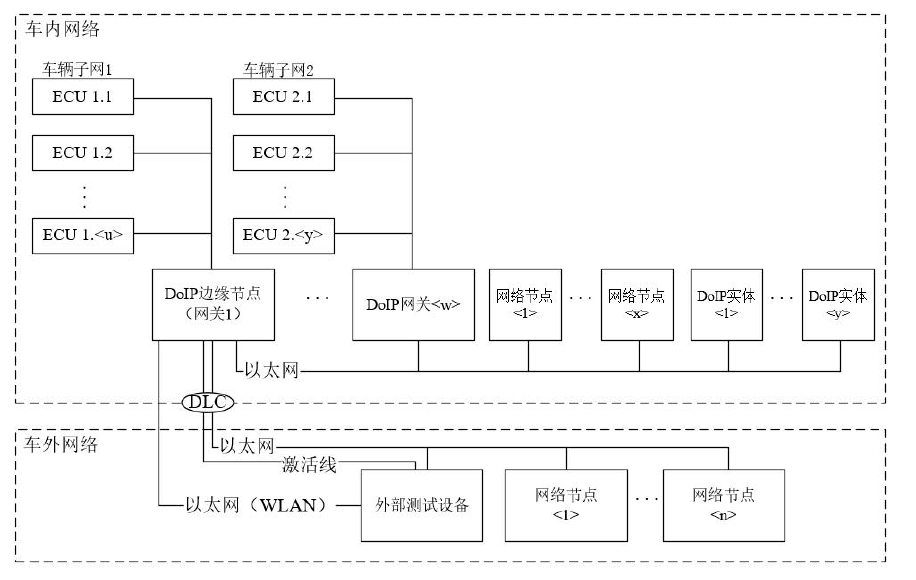
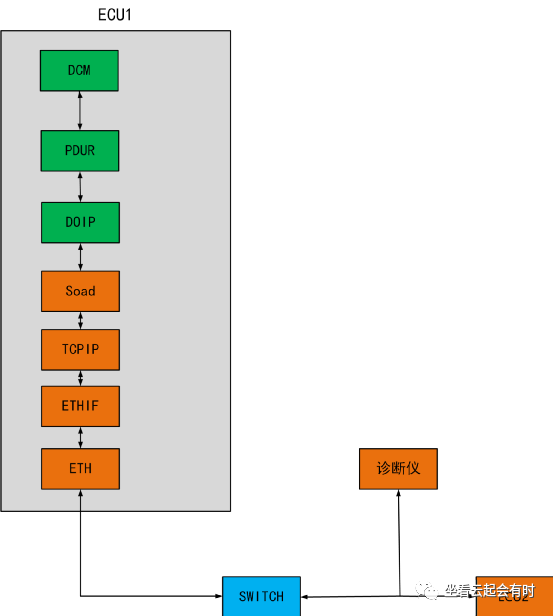
DoIP網(wǎng)絡(luò)邏輯圖介紹
DoIP網(wǎng)絡(luò)邏輯圖 一般來說,在工程師或者售后人員控制下的網(wǎng)絡(luò)節(jié)點(diǎn)被稱為外部測試設(shè)備(Externa....
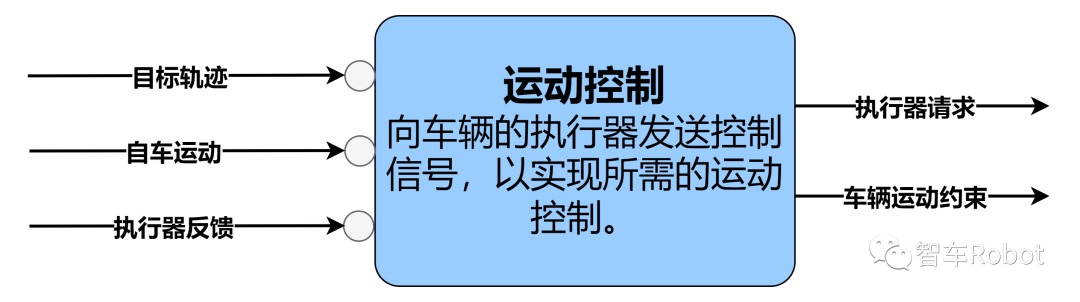
自動(dòng)駕駛運(yùn)動(dòng)控制原理
運(yùn)動(dòng)控制(激活) 運(yùn)動(dòng)控制功能模塊圖 運(yùn)動(dòng)控制(激活)功能模塊負(fù)責(zé)請求與自主車輛運(yùn)動(dòng)相關(guān)的推進(jìn)變化,....
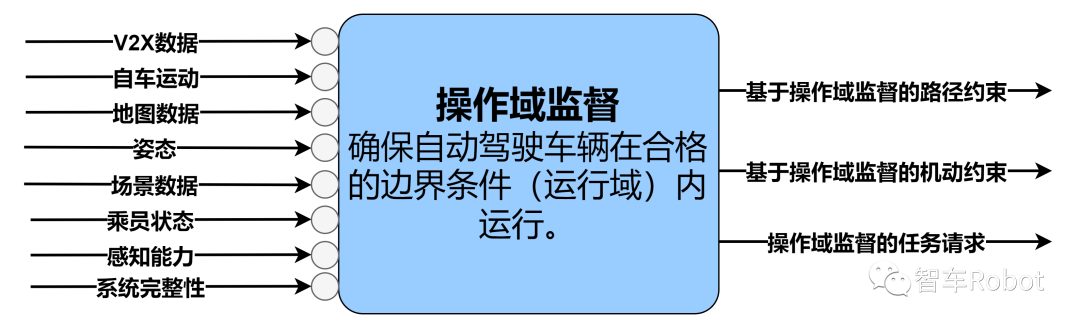
自動(dòng)駕駛操作域監(jiān)督是什么
操作域監(jiān)督(ODS) 操作域監(jiān)督功能模塊圖 操作域監(jiān)督模塊監(jiān)控與動(dòng)態(tài)駕駛?cè)蝿?wù)相關(guān)的能力、狀態(tài)和情況,....
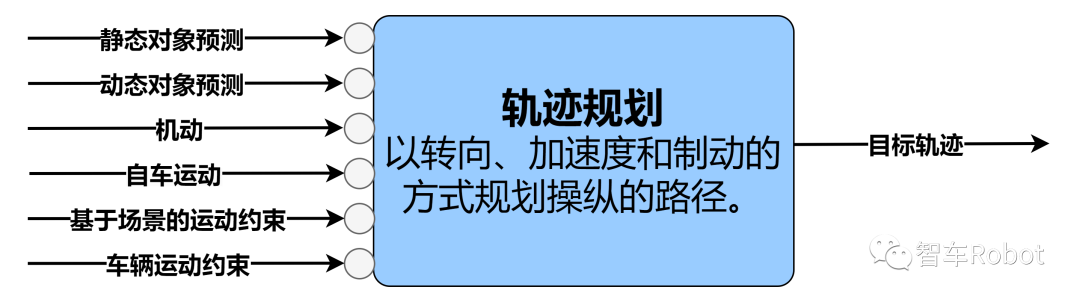
自動(dòng)駕駛軌跡規(guī)劃功能模塊圖
軌跡規(guī)劃(路徑規(guī)劃) 軌跡規(guī)劃功能模塊圖 軌跡規(guī)劃功能模塊提供算法以規(guī)劃機(jī)動(dòng)的路徑,以便控制轉(zhuǎn)向、制....
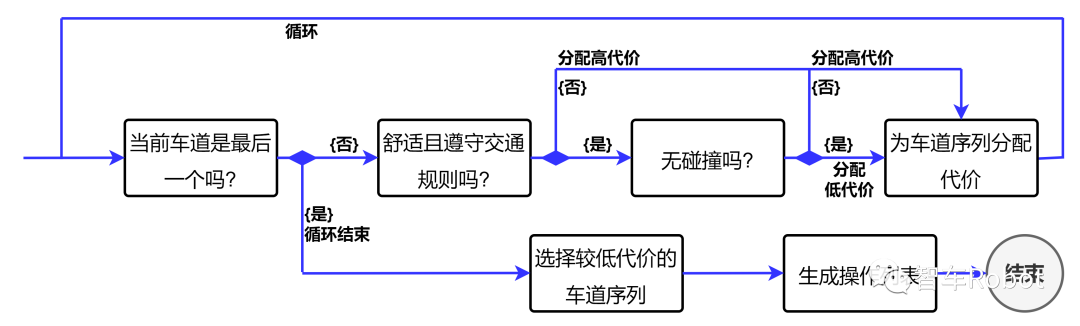
駕駛策略什么意思自動(dòng)駕駛
行為規(guī)劃(駕駛策略) 行為規(guī)劃(BP)功能模塊提供算法以在路線目標(biāo)內(nèi)做出機(jī)動(dòng)決策。 使用多模型路徑規(guī)....
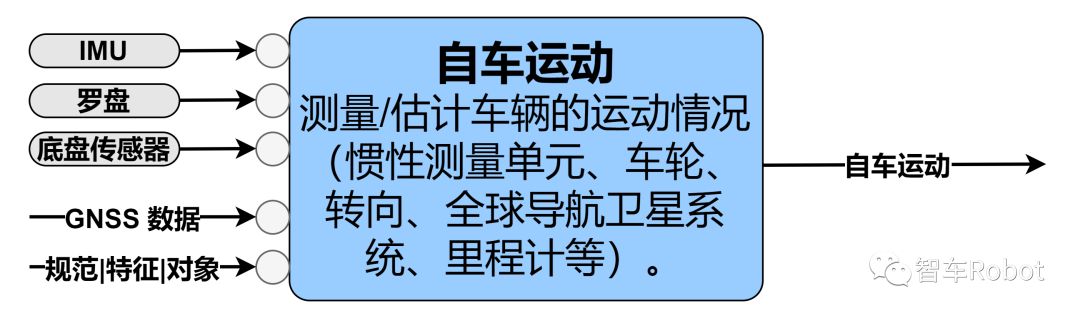
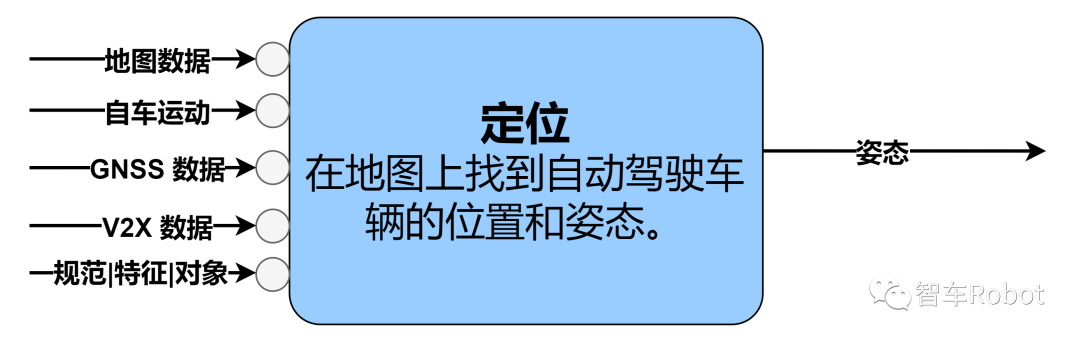
自動(dòng)駕駛系統(tǒng)功能自車運(yùn)動(dòng)與路徑規(guī)劃介紹
自車運(yùn)動(dòng) 自車運(yùn)動(dòng)功能模塊圖自車運(yùn)動(dòng)模塊估計(jì)車輛隨時(shí)間姿態(tài)(位置+方向)的變化。通過多種不同類型傳感....
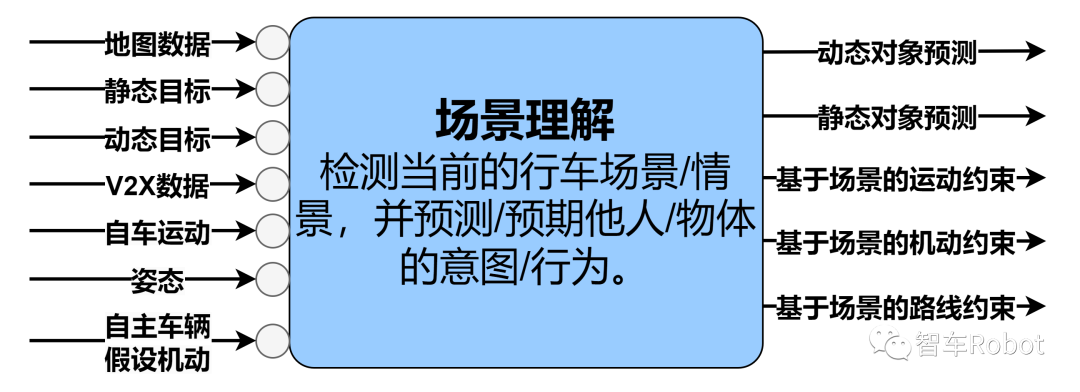
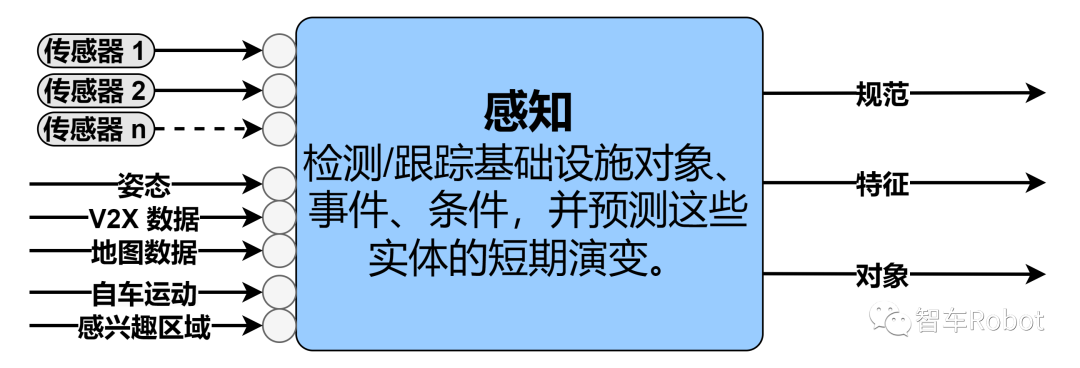
自動(dòng)駕駛感知技術(shù)介紹
感知功能模塊負(fù)責(zé)檢測、分類和跟蹤自主車輛附近的實(shí)體和事件。來自車載傳感器的數(shù)據(jù)可與其他來源的信息相結(jié)....
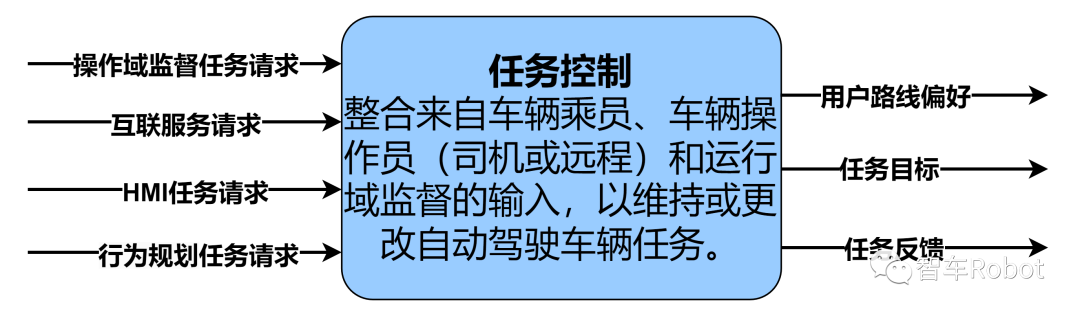
自動(dòng)駕駛系統(tǒng)任務(wù)控制介紹
任務(wù)控制 任務(wù)控制任務(wù)控制組合了來自車輛乘員、車輛操作者(司機(jī)或遠(yuǎn)程操作者)和操作域監(jiān)督的輸入,以維....
自動(dòng)駕駛功能模塊有哪些
1.1 ADS核心計(jì)算模塊(藍(lán)色塊部分) 感知模塊 - 使用傳感器數(shù)據(jù)、車輛里程計(jì)數(shù)據(jù)和后端信息(即....
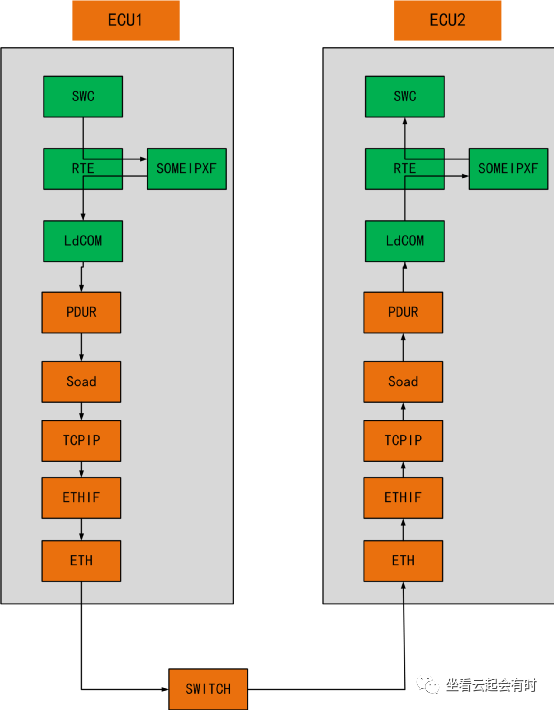
車載以太網(wǎng)靜態(tài)架構(gòu)SOME/IP的業(yè)務(wù)流程
SOME/IP的業(yè)務(wù)流程: 1)SWC通過RTE接口將數(shù)據(jù)傳遞至RTE中。 2)RTE通過使用SOM....
python定義函數(shù)與調(diào)用函數(shù)的順序
定義函數(shù)與調(diào)用函數(shù)的順序 函數(shù)被定義后,本身是不會自動(dòng)執(zhí)行的,只有在被調(diào)用后,函數(shù)才會被執(zhí)行,得到相....
python函數(shù)與函數(shù)之間的調(diào)用
函數(shù)與函數(shù)之間的調(diào)用 3.1 第一種情況 程序代碼如下: def x ( f ): def y ()....
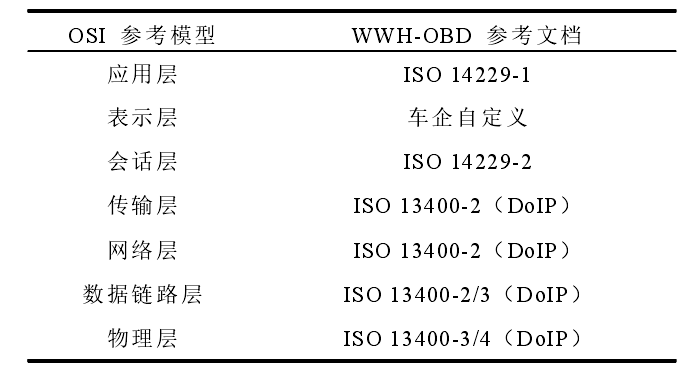
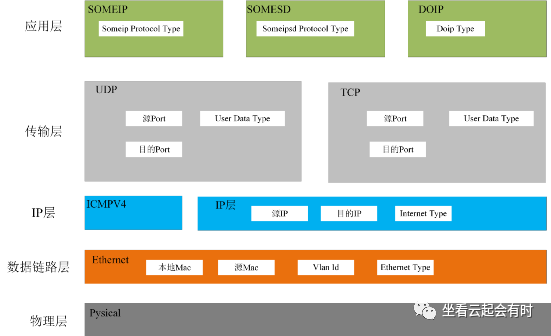
車載以太網(wǎng)的分層結(jié)構(gòu)介紹
車載以太網(wǎng)通常采用OSI(開放系統(tǒng)互連)模型的分層結(jié)構(gòu),該模型將網(wǎng)絡(luò)通信劃分為七個(gè)不同的層次,每個(gè)層....

GDB調(diào)試?yán)镌趺丛O(shè)置斷點(diǎn)
本篇講解使用GDB調(diào)試Linux應(yīng)用程序,以下以 hellowld.c 為例介紹 GDB 的調(diào)試入門....
Linux系統(tǒng)中如何進(jìn)行GDB調(diào)試
編寫代碼 # include int main ( int argc, char **argv) {....
Linux驅(qū)動(dòng)定時(shí)器使用示例
定時(shí)器使用示例 使用步驟: 1、調(diào)用 init_timer 初始化一個(gè)定時(shí)器,給 struct ti....
Linux中提高指令緩存命中率
提高指令緩存命中率 前面說的是數(shù)據(jù)緩存,現(xiàn)在看看指令緩存命中率該如何提高。 有一個(gè)數(shù)組 array ....
Linux內(nèi)核延時(shí)函數(shù)接口
內(nèi)核延時(shí)函數(shù)接口 延時(shí)的函數(shù)有 delay 和 sleep 兩種類型: delay接口 void n....
Linux高精度定時(shí)器hrtimer使用示例
低分辨率定時(shí)器是用jiffies來定時(shí)的,所以會受到HZ影響,如果HZ為200,代表每秒種產(chǎn)生200....
Linux驅(qū)動(dòng)高精度定時(shí)器hrtimer
高分辨率定時(shí)器( hrtimer )以 ktime_t 來定義時(shí)間, 精度可以達(dá)到納秒級別 , kt....
Linux性能優(yōu)化:Cache對性能的影響
Cache對性能的影響首先我們要知道,CPU訪問內(nèi)存時(shí),不是直接去訪問內(nèi)存的,而是先訪問緩存(cac....

Linux中如何在stty修改串口波特率
Linux內(nèi)核啟動(dòng)后,串口的波特率通常是115200或者9600,此時(shí)如果想要修改串口的波特率,在s....
如何使用gdbserver對目標(biāo)開發(fā)板上的程序進(jìn)行遠(yuǎn)程調(diào)試
本篇講解如何使用 gdbserver 對目標(biāo)開發(fā)板上的程序進(jìn)行遠(yuǎn)程調(diào)試。 安裝 GDBSERVER ....
Linux內(nèi)核啟動(dòng)速度優(yōu)化的幾個(gè)方法
kernel壓縮方式 kernel 有不同的壓縮格式,常見的如 gz 、 xz 、 lzma 等。 ....





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)