") 自動駕駛系統(tǒng)功能自車運動與路徑規(guī)劃介紹
自動駕駛系統(tǒng)功能自車運動與路徑規(guī)劃介紹
自車運動
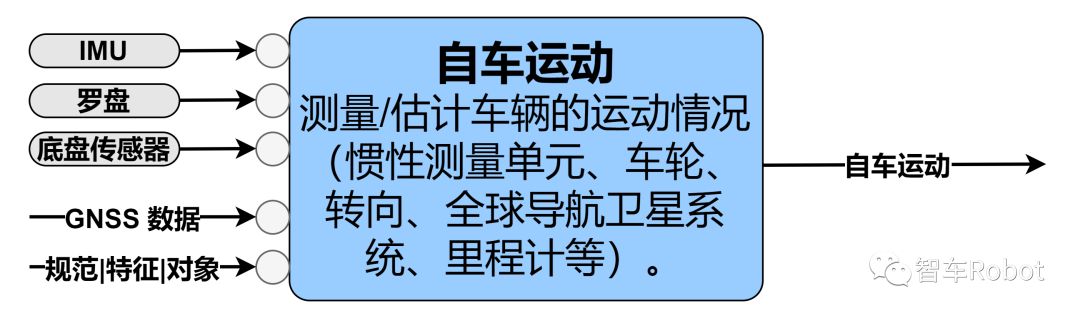
自車運動功能模塊圖自車運動模塊估計車輛隨時間姿態(tài)(位置+方向)的變化。通過多種不同類型傳感器計算和改進的運動估計的融合,可以獲得比單一傳感器測量更準確可靠的估計。根據(jù)系統(tǒng)的不同,使用的輸入數(shù)量各異。更簡單的自車運動組件可能只處理IMU和底盤傳感器的數(shù)據(jù)。然而,更復雜的系統(tǒng)可能使用所有或子集的其他輸入來計算額外的運動估計,然后將其融合在一起。
自車運動輸入:
?規(guī)范|特征|對象:使用連續(xù)的感知數(shù)據(jù)序列來估計自車運動。估計可以基于具有不同計算復雜度的各種算法。例子是光流和基于CNN的估計器,利用像素級數(shù)據(jù)或已經(jīng)檢測到的特征。也可以利用已分類的對象與已知速度(例如護欄)。
?底盤傳感器數(shù)據(jù):包含控制/執(zhí)行器反饋,改進自車運動估計。
?IMU數(shù)據(jù):包含加速度計和陀螺儀傳感器數(shù)據(jù),提供自車運動估計。
?羅盤數(shù)據(jù):提供絕對旋轉(zhuǎn)測量,改進自車運動估計。
?GNSS數(shù)據(jù):從多個順序的地理空間位置讀數(shù)計算自車運動估計。
自車運動輸出:
?自車運動:提供自車運動估計使自動駕駛系統(tǒng)中的多個其他組件(例如感知或定位)能夠完成其任務。
路徑規(guī)劃
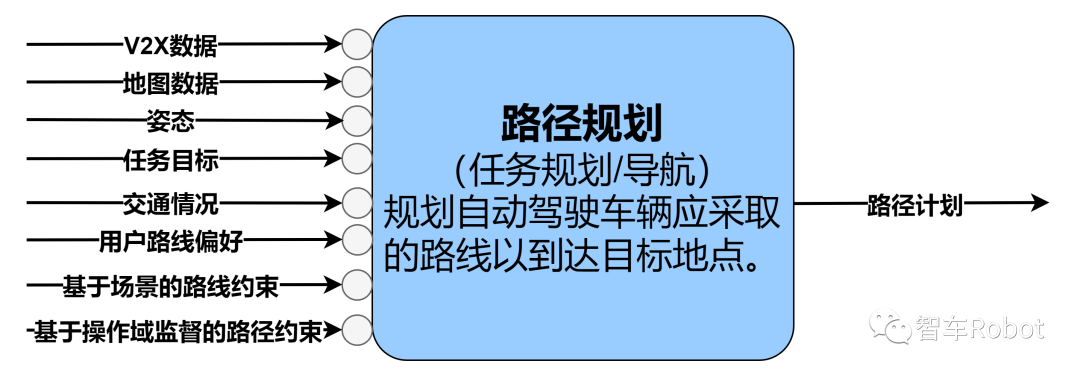
路徑規(guī)劃功能模塊圖
路徑規(guī)劃功能模塊提供算法來確定實時路徑以到達目標目的地。它接受駕駛員所需的目的地,并從車輛當前位置計算到達該目的地的最短路徑,同時考慮駕駛員偏好和交通條件。也稱為任務規(guī)劃,它負責將“從A到B”的期望任務分解成結(jié)構(gòu)化的道路片段,如所提供的地圖(典型示例是提供車道級子任務)所指定和定義的。一組車道級子任務被輸出,它們描述了車輛在每個交叉口的所需車道和轉(zhuǎn)向。此外,當車輛完成當前的車道級子任務時,它會自動計算下一組目標并提供下一個車道級子任務。在設有停止標志、交通燈或讓行要求的交叉口,該模塊參考來自感知系統(tǒng)的輸入來決定汽車是否可以進行到下一個提交。
路徑規(guī)劃輸入:
?V2X數(shù)據(jù):用于接收交通信息或道路警報。
?地圖數(shù)據(jù):計算路線。
?姿態(tài):提供路線的起點。
?任務目標:指定目標目的地。
?交通狀況:提供自主車輛附近或路線計劃上的交通狀況的動態(tài)源信息。
?用戶路線偏好:提供約束路線選擇的偏好或規(guī)則。可能包括乘車服務或自主車輛本身保持在操作設計域內(nèi)或避免收費道路的約束。
?基于場景的路線約束:提供動態(tài)確定的路線約束,如封閉道路標志、高速公路上封閉的車道或用路障封閉的高速公路入口。
?基于操作域監(jiān)控的路線約束:由于需要保持在操作設計域內(nèi)而對路線進行約束。一個示例是由于缺乏路燈照明而在某些時間避免某些路線。
路徑規(guī)劃輸出:
?路徑計劃:提供自主車輛將要走的路線描述,包括適用的車道,以達到目標目的地。
-
模塊
+關(guān)注
關(guān)注
7文章
2722瀏覽量
47576 -
汽車電子
+關(guān)注
關(guān)注
3027文章
7985瀏覽量
167325 -
車輛
+關(guān)注
關(guān)注
0文章
83瀏覽量
15178 -
自動駕駛
+關(guān)注
關(guān)注
784文章
13877瀏覽量
166618
發(fā)布評論請先 登錄
相關(guān)推薦
【mBot申請】自動駕駛車
自動駕駛真的會來嗎?
細說關(guān)于自動駕駛那些事兒
自動駕駛的到來
UWB主動定位系統(tǒng)在自動駕駛中的應用實踐
車聯(lián)網(wǎng)對自動駕駛的影響
中國自動駕駛行業(yè)前景看好,國產(chǎn)技術(shù)迅速發(fā)展
如何讓自動駕駛更加安全?
自動駕駛車的人車交互接口設計方案
UWB定位可以用在自動駕駛嗎
自動駕駛系統(tǒng)設計及應用的相關(guān)資料分享
自動駕駛技術(shù)的實現(xiàn)
自動駕駛線控底盤VCU功能介紹
自動駕駛汽車四種常用的路徑規(guī)劃算法解析
自動駕駛之路徑規(guī)劃






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論