場景理解
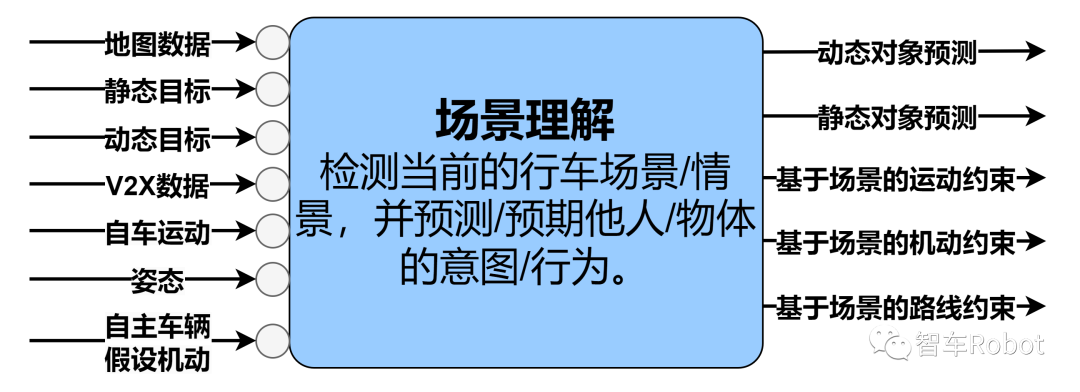
場景理解功能模塊圖場景理解功能模塊體現了負責“理解”當前駕駛場景的算法。如果自主車輛要在共享的駕駛空間中進行智能操縱,則有必要預測/預見該空間內其他實體的行動。場景或方案理解不僅僅是識別當前情況的“狀態”,還包括對其演變方式的預測。
此功能模塊中的算法可能能夠模擬多種因果場景,以幫助為自主車輛選擇最佳行動方案。然而,場景理解本身不會對自主車輛應該采取的行動做出任何決定,也不會選擇要模擬的行動方案。
場景理解輸入:
?地圖數據:提供當前駕駛場景中基礎設施的布局。對預測其他道路使用者/實體的意圖/行為有用。
?靜態對象:識別駕駛場景中對自主車輛和其他道路實體可能占用的可行駛空間有影響的不可移動對象。靜態對象可能具有動態變化的狀態,如交通燈變紅或收費站變為關閉。
?動態對象:用于預測當前駕駛場景可能如何演變,主要關注動態對象的軌跡和狀態變化。動態對象的一個預測示例是車輛剛打開左轉燈然后左轉。
?V2X數據:可能提供可以利用的信息來預見當前駕駛場景的演變,如即將改變的交通燈。
?自車運動:為預測引擎提供自主車輛自車運動信息。
?姿態:允許預測引擎在地圖上放置自主車輛。
?自主車輛假設機動:為預測引擎提供自主車輛的假設機動。這種機動可能會引發其他道路使用者的反應,需要預測。例如,改道可能會強迫該車道上迎面而來的另一個道路使用者進行危險制動。在行為規劃做出決定之前,可能會向場景理解功能模塊提交多個自主車輛機動假設。
場景理解輸出:?動態對象預測:用于安全計劃改變自主車輛當前軌跡。
?靜態對象預測:用于安全計劃改變自主車輛當前軌跡。
?基于場景的運動約束:根據駕駛場景條件約束自主車輛的運動。
?基于場景的機動約束:根據駕駛場景條件約束自主車輛的計劃機動。
?基于場景的路線約束:根據駕駛場景對自主車輛的路線規劃加以約束。
?場景數據:提供可以利用的集體駕駛條件視圖,以確保自主車輛在其設計參數內運行。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
相關推薦
FPGA(Field-Programmable Gate Array,現場可編程門陣列)在自動駕駛領域具有廣泛的應用,其高性能、可配置性、低功耗和低延遲等特點為自動駕駛的實現提供了強有力的支持。以下
發表于 07-29 17:09
可以根據自動駕駛系統的具體需求,通過編程來配置FPGA的邏輯功能和連接關系,以適應不同的應用場景和算法變化。這種靈活性使得FPGA能夠快速適應自動駕駛技術的快速發展和變化。
低延遲:
自動駕
發表于 07-29 17:11
看到新聞報道說谷歌自動駕駛汽車已經行駛近30萬公里了,非常的強大~~上次參加了重慶新能源汽車峰會,對會上富士通半導體宣講的一款全景視頻汽車實時監控技術平臺似乎看到了自動駕駛的影子(利用MB86R11
發表于 06-14 16:15
`特斯拉首起自動駕駛致命車禍,自動駕駛的冬天來了?“一個致命的事故一定是由多個小的錯誤組成的。” 7月初,特斯拉發表博客敘述了NHTSA(美國國家公路交通安全管理局)正在著手調查第一起Tesla
發表于 07-05 11:14
業界帶來了很大的負面影響,但核心仍是如何去理解autopilot,并不能因此對自動駕駛產生巨大質疑,畢竟是兩個不同功能。 “特斯拉autopilot其核心技術來說,使用的是以色列Mobile eye
發表于 07-21 09:00
傳統汽車廠商更趨向于通過技術的不斷積累,場景的不斷豐富,逐步從輔助駕駛過渡到半自動駕駛,進而在將來最終實現無人駕駛;某些高科技公司則希望通過各種外部傳感器實時采集海量數據,處理器經
發表于 06-08 15:25
由南德意志出版及活動有限公司舉辦的 國際AI自動駕駛高峰論壇 將于 2017年11月28/29日 在 德國慕尼黑 舉辦,中德聯合股份公司作為中國獨家合作伙伴,誠邀您撥冗蒞臨!【活動背景】AI
發表于 09-13 13:59
領域,自動駕駛卻可以率先實現落地,例如固定路線低速行駛的環衛車、港口的集裝箱貨車、封閉小區的物流車、室內停車庫,以及園區的接駁車等場景。在垂直領域深耕,以及與行業寡頭進行合作,是推進自動駕駛技術快速落地
發表于 12-14 17:30
,可在兩種模式間隨時切換,以保證駕駛員可以隨時接管車輛。自動駕駛研發專家表示,針對不同的場景和不同的交通狀況,自動駕駛技術必須要一步一步地測試,去適應不同地區不同環境中的道路
發表于 05-13 00:26
作在未來20 - 30年中,自動駕駛汽車(AV)將改變我們的駕駛習慣、運輸行業并更廣泛地影響社會。 我們不僅能夠將汽車召喚到我們的家門口并在使用后將其送走,自動駕駛汽車還將挑戰個人擁有汽車的想法,并
發表于 08-07 07:13
5-7 所示。1、邊緣計算在自動駕駛中的應用場景汽車自動駕駛具有“智慧”和“能力”兩層含義。所謂“智慧”是指汽車能夠像人一樣智能地感知、綜合、判斷、推理、決斷和記憶;所謂“能力”是指自動駕駛
發表于 07-21 14:12
。隨著駕駛任務的消失和車輛控制權人數的增加,自動駕駛也必然會帶來全新的人車關系。因此,面向自動駕駛車的人車交互接口的再設計面臨了機遇和挑戰,我們需要重新探討如何為全新交互場景下的“乘客
發表于 07-30 07:57
Geiger 的研究主要集中在用于自動駕駛系統的三維視覺理解、分割、重建、材質與動作估計等方面。他主導了自動駕駛領域著名數據集 KITTI 及多項自動駕駛計算機視覺任務的基準體系建設,
發表于 07-30 06:49
作者:余貴珍、周彬、王陽、周亦威、白宇目錄第一章 自動駕駛系統概述1.1 自動駕駛系統架構1.1.1 自動駕駛系統的三個層級1.1.2 自動駕駛系統的基本技術架構1.2
發表于 08-30 08:36
k隨著汽車電子的日益復雜化以及汽車電子電氣架構(EEA)的升級,人們對于聯網智能汽車的需求也在逐步上升,大量先進技術往汽車上應用,如高級駕駛輔助系統(ADAS)、自動駕駛等,這些新技術也對車載網絡
發表于 09-03 08:31
 自動駕駛場景理解模塊
自動駕駛場景理解模塊





 工商網監
工商網監
評論