Launch文件解析 先來看下剛才運行的launch文件,里邊啟動了四個節(jié)點,分別是: 小海龜仿真器....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 17:44
?640次閱讀
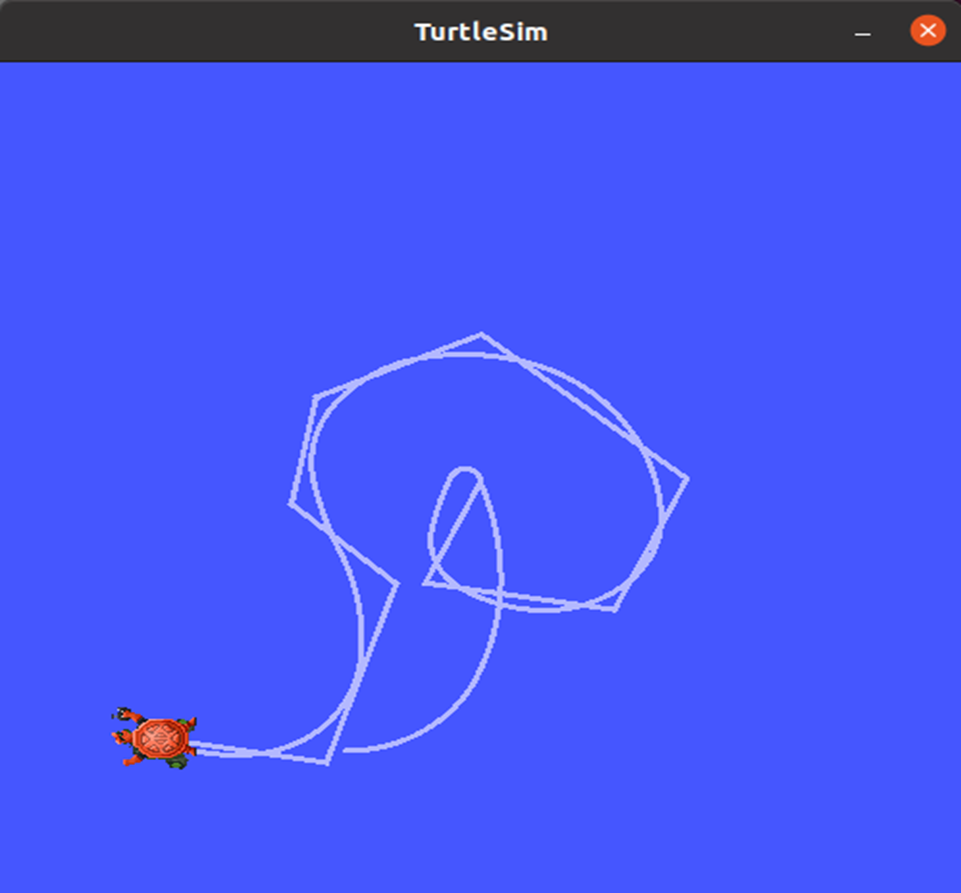
海龜跟隨功能解析 運行效果 先看下實現(xiàn)的效果,啟動終端后,通過如下命令啟動例程: ** ros2 l....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 17:35
?718次閱讀
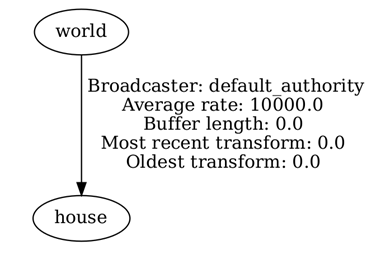
靜態(tài)TF廣播 我們說TF的主要作用是對坐標(biāo)系進(jìn)行管理,那就管理一個試試唄? 坐標(biāo)變換中最為簡單的應(yīng)該....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 17:31
?607次閱讀
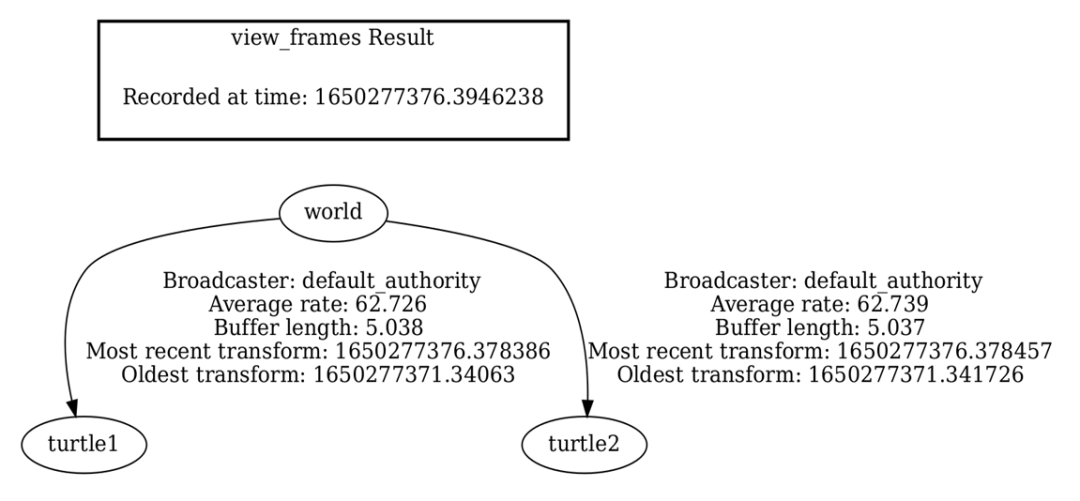
TF命令行操作 ROS中的TF該如何使用呢?我們先通過兩只小海龜?shù)氖纠私庀禄谧鴺?biāo)系的一種機(jī)器人....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 17:24
?1226次閱讀
坐標(biāo)系是我們非常熟悉的一個概念,也是機(jī)器人學(xué)中的重要基礎(chǔ),在一個完整的機(jī)器人系統(tǒng)中,會存在很多坐標(biāo)系....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 17:20
?1596次閱讀

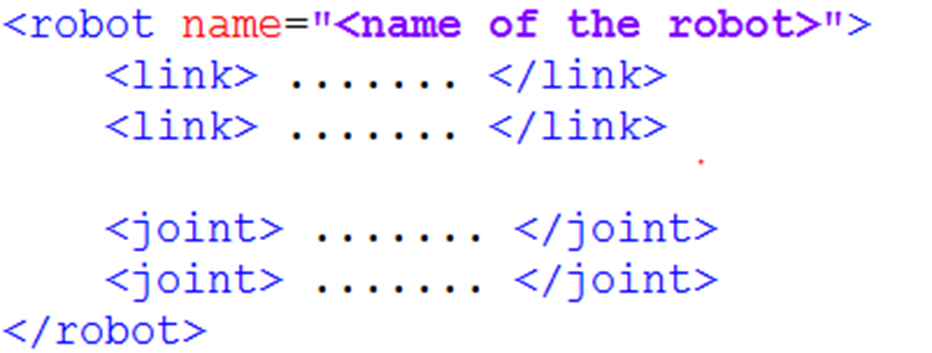
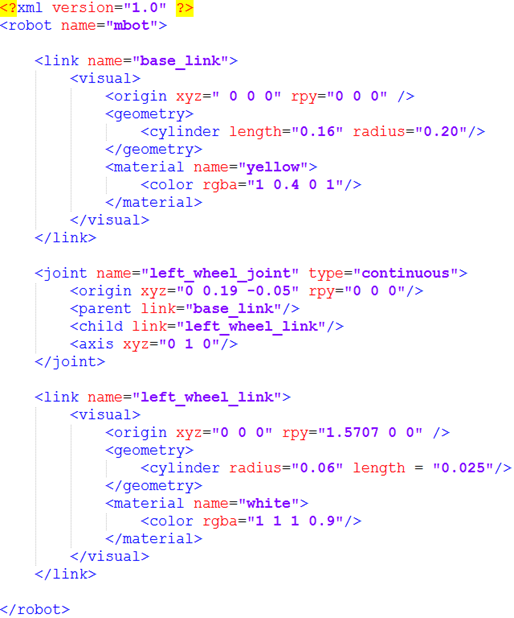
完整機(jī)器人模型 所有的link和joint標(biāo)簽完成了對機(jī)器人每個部分的描述和組合,全都放在一個rob....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 17:09
?993次閱讀
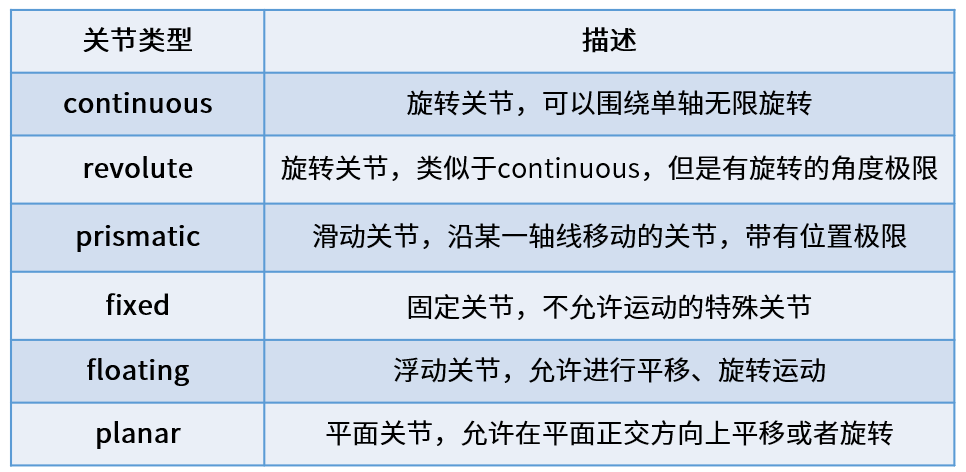
機(jī)器人模型中的剛體最終要通過關(guān)節(jié)joint連接之后,才能產(chǎn)生相對運動。 URDF中的關(guān)節(jié)有六種運動類....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 16:51
?1787次閱讀
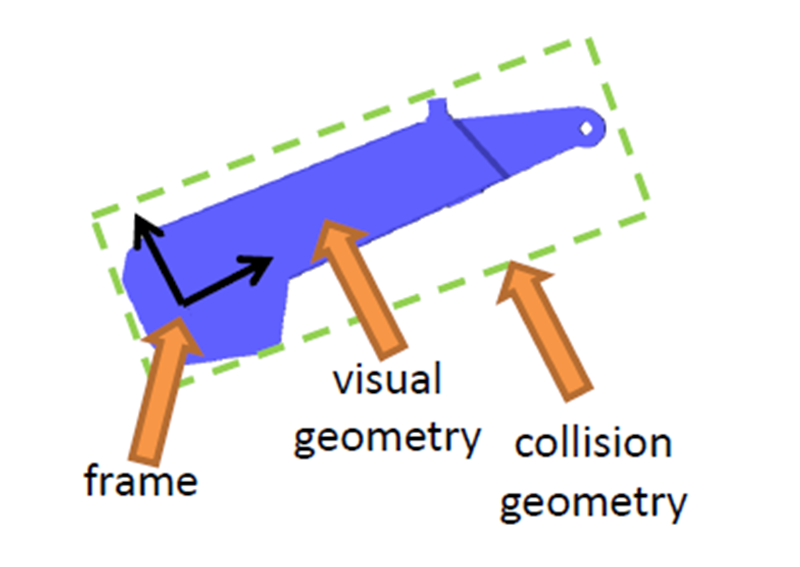
標(biāo)簽用來描述機(jī)器人某個剛體部分的外觀和物理屬性,外觀包括尺寸、顏色、形狀,物理屬性包括質(zhì)量、慣性矩陣....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 16:39
?824次閱讀
URDF:機(jī)器人建模方法 ROS是機(jī)器人操作系統(tǒng),當(dāng)然要給機(jī)器人使用啦,不過在使用之前,還得讓ROS....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 16:30
?959次閱讀
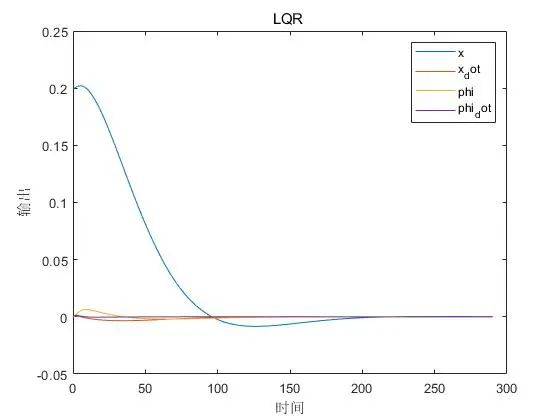
程序?qū)崿F(xiàn): 在MATLAB中可采用的語法為: [K,S,P] = l qr(sys,Q,R,N) [....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 16:20
?446次閱讀
為實現(xiàn)與環(huán)境的安全、柔順交互,需要將機(jī)器人期望動力學(xué)行為與接觸環(huán)境所表現(xiàn)出來的特征進(jìn)行匹配。定性地分....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 15:59
?544次閱讀
隨著自動化技術(shù)的不斷進(jìn)步,機(jī)器臂(Robotic Manipulator)在噴涂、上下料、分揀、碼垛....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 15:57
?1040次閱讀
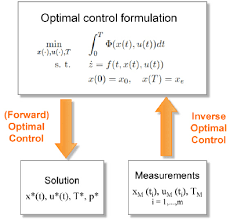
機(jī)器人在執(zhí)行期望目標(biāo)任務(wù)時,我們希望機(jī)器人能精確地達(dá)到人類所預(yù)設(shè)的目標(biāo),那么我們就來理解下什么是最優(yōu)....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 15:29
?1096次閱讀
代碼解讀 int main(int argc, char** argv){ ros::init(ar....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 15:18
?968次閱讀

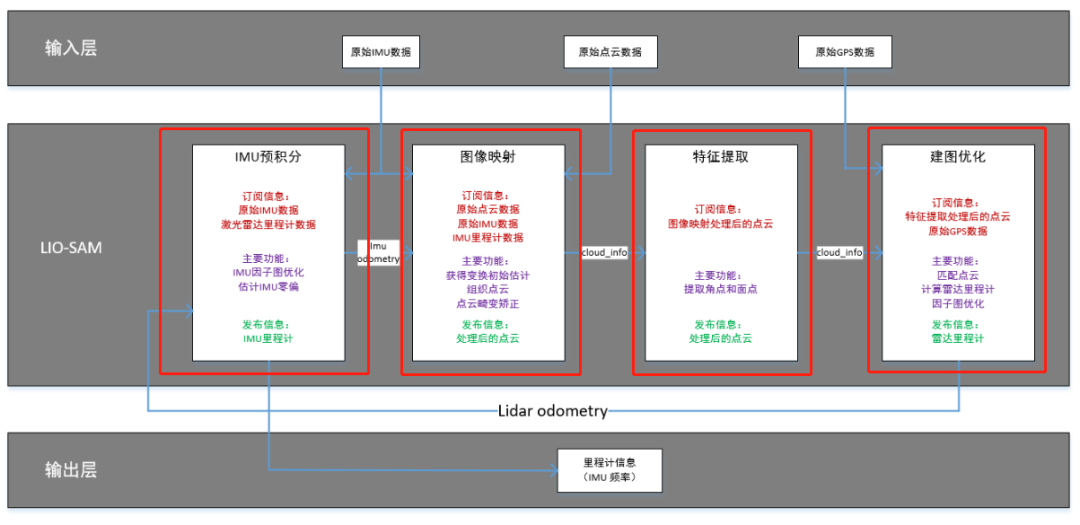
LIO-SAM的全稱是:Tightly-coupled Lidar Inertial Odometr....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 15:04
?1192次閱讀
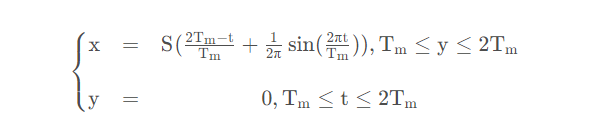
支撐相足端軌跡 相比于擺動相的足端軌跡,支撐相的設(shè)計就顯得稍微簡單。首先我們要知道兩點: 支撐相水平....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 11:48
?420次閱讀
1、擺動相軌跡設(shè)計 基于第二節(jié)中提到的原則,文獻(xiàn)[1]中提出了一種基于復(fù)合擺線形式的軌跡規(guī)劃方法,并....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 11:43
?686次閱讀
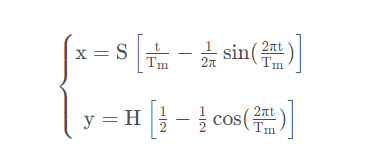
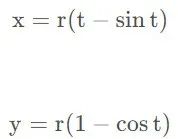
一、擺線 擺線,又稱旋輪線、圓滾線,在數(shù)學(xué)中,擺線(Cycloid)被定義為,一個圓沿一條直線運動時....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-22 11:35
?851次閱讀
ROS的運用開發(fā) 一般來說市面上機(jī)器人的開發(fā)分兩個主流,一個是移動機(jī)器人(AGV),主要運用場景是酒....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-21 18:17
?1048次閱讀
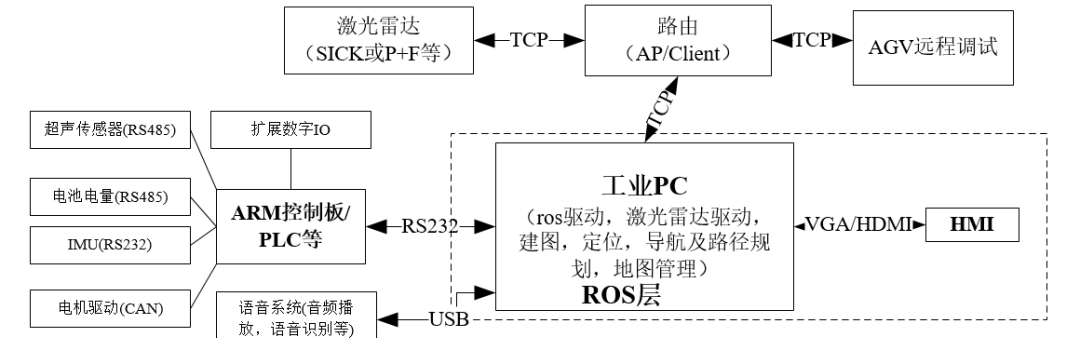
ROS的擴(kuò)展 ROS除了本身框架性的東西以外,最大的特色就是能融合很多其他的東西,形成一個機(jī)器人開發(fā)....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-21 18:12
?740次閱讀
ROS核心框架 對于第一個問題,我也沒仔細(xì)研究過源碼,核心代碼基本由python和C++組成,運用了....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-21 18:07
?1037次閱讀

ROS初探 剛開始入手ROS的時候確認(rèn)有點麻煩,第一它運行在Ubuntu環(huán)境。 不過還是用Ubunt....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-21 17:55
?683次閱讀
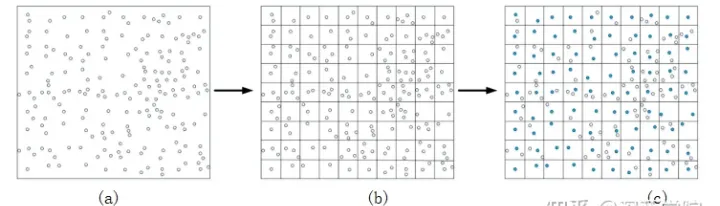
非均勻體素采樣 SamplingSurfaceNormal,將輸入空間劃分為網(wǎng)格,直到每個網(wǎng)格中最多....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-21 17:50
?869次閱讀
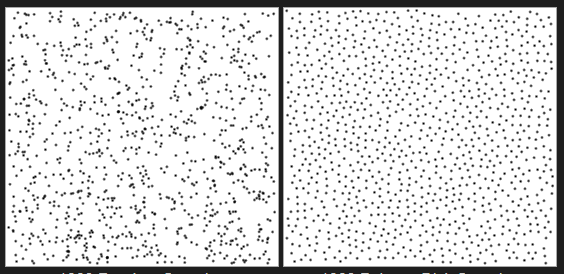
泊松盤采樣 泊松盤采樣(possion disk sampling)的特點是任何兩個點的距離都不會隔....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-21 17:42
?1372次閱讀
法線空間采樣 NormalSpaceSampling即:法線空間采樣,它在法向量空間內(nèi)均勻隨機(jī)抽樣,....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-21 17:28
?946次閱讀
最遠(yuǎn)點采樣(Farthest Point Sampling) 這里我們來單獨看一下調(diào)用代碼,這里可以....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-21 17:18
?841次閱讀
基礎(chǔ)下采樣 1.1 點云隨機(jī)下采樣 點云下采樣是對點云以一定的采樣規(guī)則重新進(jìn)行采樣,目的是在保證點云....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-21 17:03
?1015次閱讀
VSync-offset/duration 虛擬化后的VSync還有一個好處,就是可以對VSync進(jìn)....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-21 16:57
?1185次閱讀

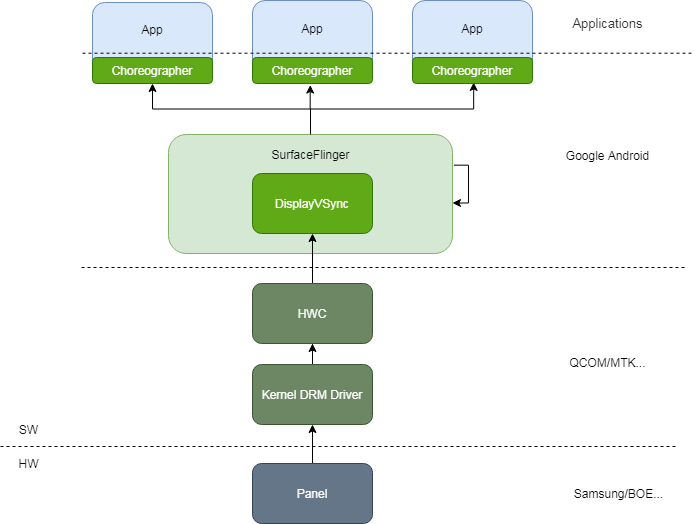
App與SurfaceFlinger是不同的進(jìn)程,它們之間傳遞VSync的話涉及到進(jìn)程間通信,而且V....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-21 16:32
?953次閱讀

VSync的虛擬化 由上面的介紹可以知道,VSync其實起源于顯示屏,但是想想如果每個App和Sur....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-21 16:23
?758次閱讀






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)