運行 安裝上面的步驟,到這里就全部安裝好了,體驗LLM有兩種方式,一個是直接在shell窗口中以聊天....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-20 15:52
?822次閱讀
一、安裝 1. OriginBot系統安裝 目前OriginBot系統有V1和V2兩個版本,只有V2....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-20 15:46
?510次閱讀
作為無人車以及智能機器人而言,在裝配過程中各個傳感器之間的外參標定一直是比較頭疼的問題。這里作者也系....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-20 15:34
?1751次閱讀

這里以一個智能車代碼工程為例,抽取串口通信部分代碼 在頭文件中,進行串口頭文件的包含 # inclu....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 18:10
?1119次閱讀
創建設備別名 需要創建設備別名原因: 在運行一個ros程序的時候需要提供一個端口名,這個端口名一般是....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 18:07
?790次閱讀

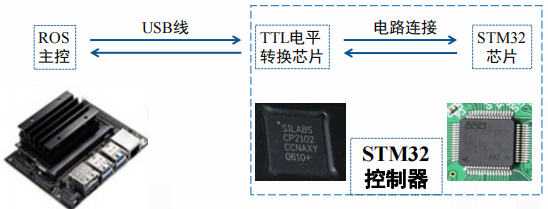
硬件連接 ROS主控通過usb線連接到一個TTL電平轉換芯片,再由這個電平轉換芯片連接STM32芯片....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 18:00
?963次閱讀
以簡單的智能車為例,一般會存在兩個控制器,一個是運行ROS的主控,另一個是運行電機控制和傳感器信息采....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 17:54
?811次閱讀
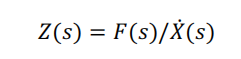
阻抗控制在頻域范圍內的定義: 考慮到交互力與位置的關系,可以演變為如下模式: 阻抗可以以期望慣量、阻....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 17:47
?715次閱讀
機器人具有高度非線性,強時變以及強耦合等動力學特性,為了提高機器人控制的性能,研究人員提出了基于模型....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 17:43
?867次閱讀
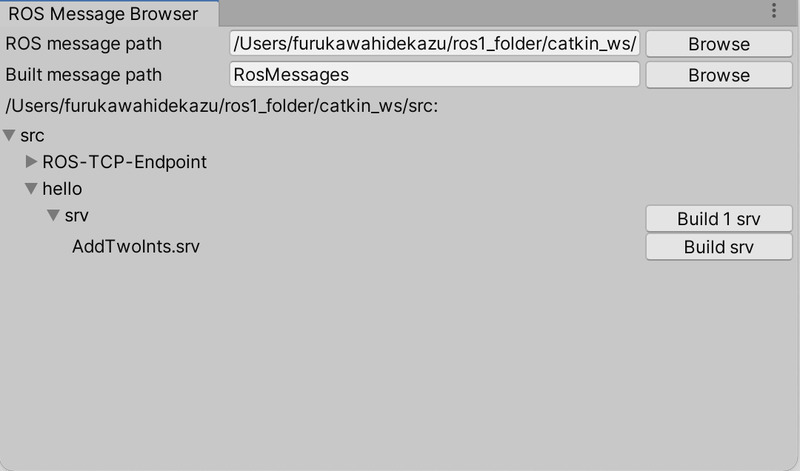
Service話題 首先使用同樣的方法可以完成srv文件的導入 服務端的實現。Hierarchy窗口....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 17:36
?644次閱讀
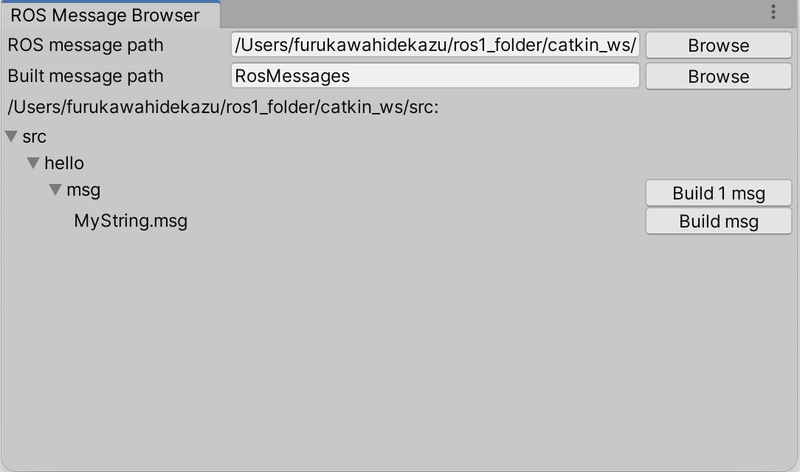
自定義msg 將消息導入Unity的步驟如下所示: 1.Unity的菜單“Robotics→Gene....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 17:26
?562次閱讀
對于ROS而言,其最常用的就是Topic話題以及Service兩個了。之前我們在了解Unity Ro....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 17:22
?1047次閱讀

柔性機械臂 剛性機械臂建模方法已經可以有效地求解出機械臂各部分之間的耦合情況,但是對于柔性機械臂的動....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 17:12
?948次閱讀
剛性機械臂 機械臂建模是機械臂控制的基礎,控制效果的好壞很大程度上決定于所建立的動力學模型的準確性。....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 17:03
?898次閱讀
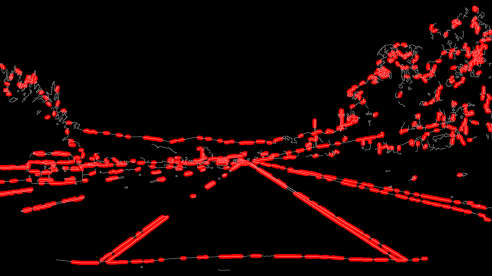
Canny邊緣檢測+霍夫變換 顏色閾值+圖像掩模的方法雖然簡單,但是只能應對一些固定顏色車道線的場景....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 16:55
?1103次閱讀
1.顏色閾值+ 區域掩模 我們可以僅僅通過設置一些RGB通道閾值,來提取車道線。 以下的代碼設置了R....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 16:49
?453次閱讀

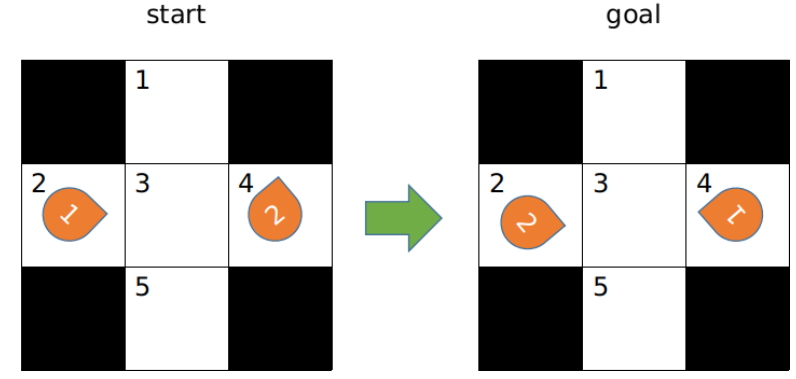
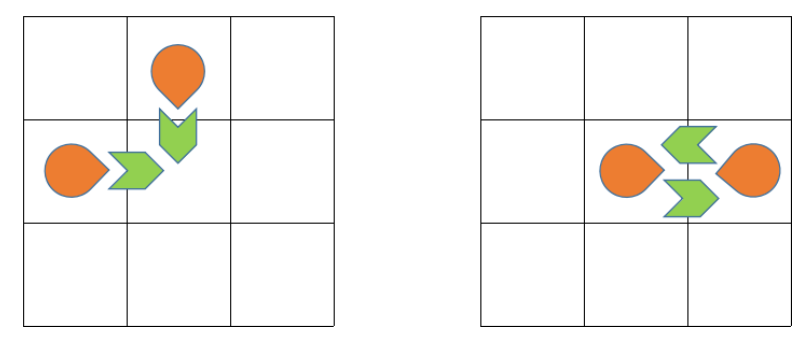
實例講解 以下將通過一個簡單的實例講解CBS的基本過程,實例如圖2所示。 圖2 初始和目標狀態 CB....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 16:44
?885次閱讀
單個機器人通過路徑規劃、運動控制,能夠躲避環境中的障礙物,但會面臨一個嚴峻的問題。當一個場景中存在多....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 16:20
?724次閱讀
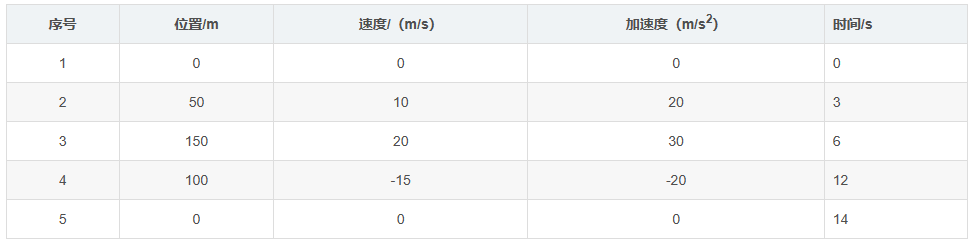
采用五次多項式插值法進行機械臂軌跡規劃,基于Matlab Robotics Toolbox平臺進行關....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 16:11
?1458次閱讀
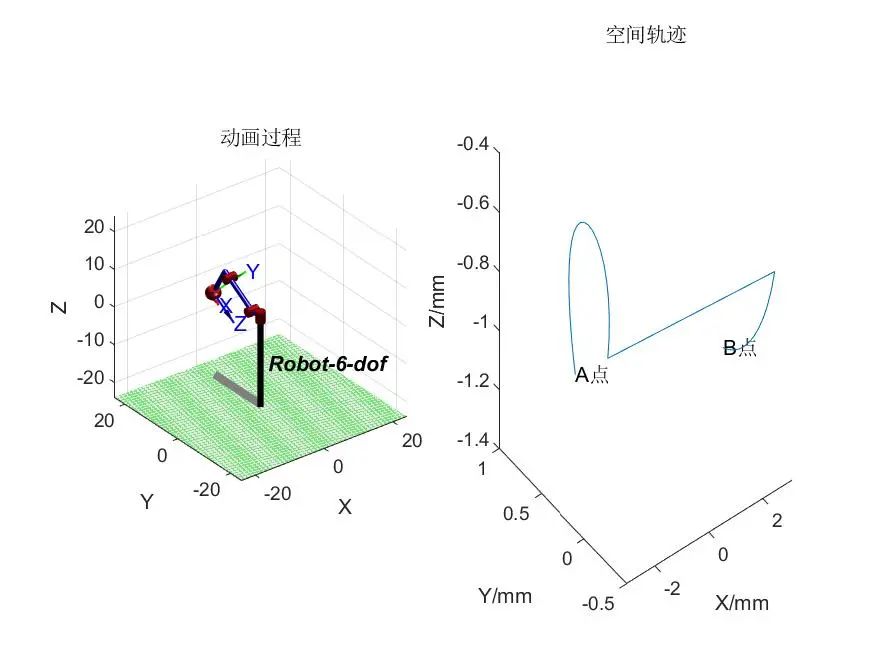
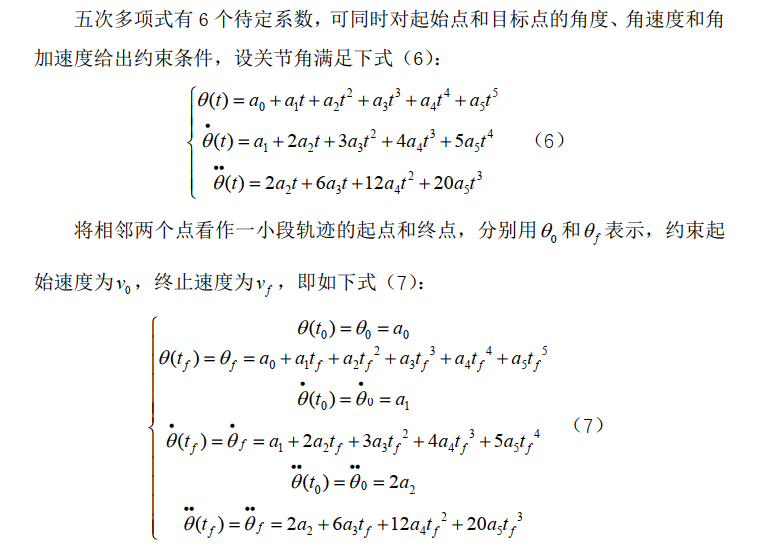
五次多項式插值法 五次多項式有6個待定系數,可同時對起始點和目標點的角度、角速度和角加速度給出約束條....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 15:57
?2065次閱讀
對串聯機械臂而言,軌跡規劃可以分為:關節空間軌跡規劃和笛卡爾空間軌跡規劃。關節空間軌跡規劃是把機器人....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 15:52
?1366次閱讀
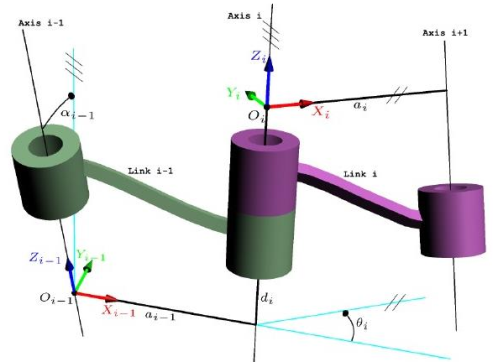
該機械臂 6 個關節都是轉動關節,前 3 個關節確定手腕參考點的位置,后 3個關節確定手腕的方位。和....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-17 15:48
?3168次閱讀
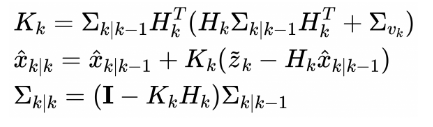
總體模型 將以上兩組單獨的測量結果疊加起來,形成卡爾曼濾波器中使用的觀測向量。 同樣,每個度量的協方....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 18:04
?571次閱讀
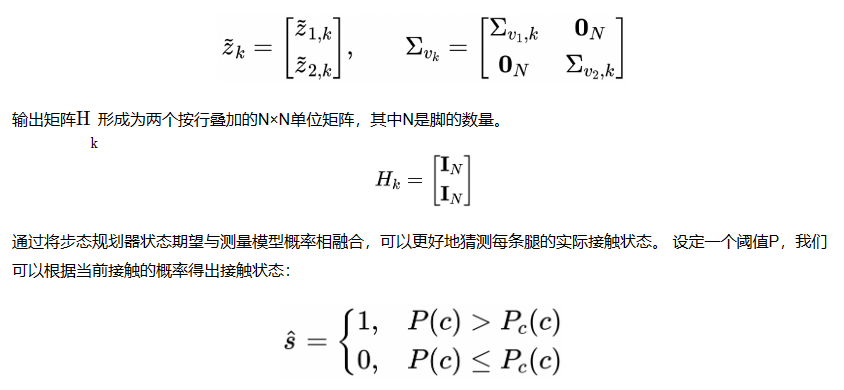
測量模型(update模型) 預測模型中極有可能包含了規劃器所產生的誤差,因此,我們可以使用更多的測....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 17:57
?472次閱讀
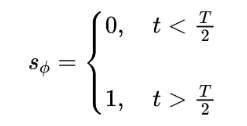
接觸檢測 步態規劃器給出的接觸序列是嚴格按照時間進行周期性計算的。而在實際運行當中,由于地形的不平整....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 17:51
?677次閱讀
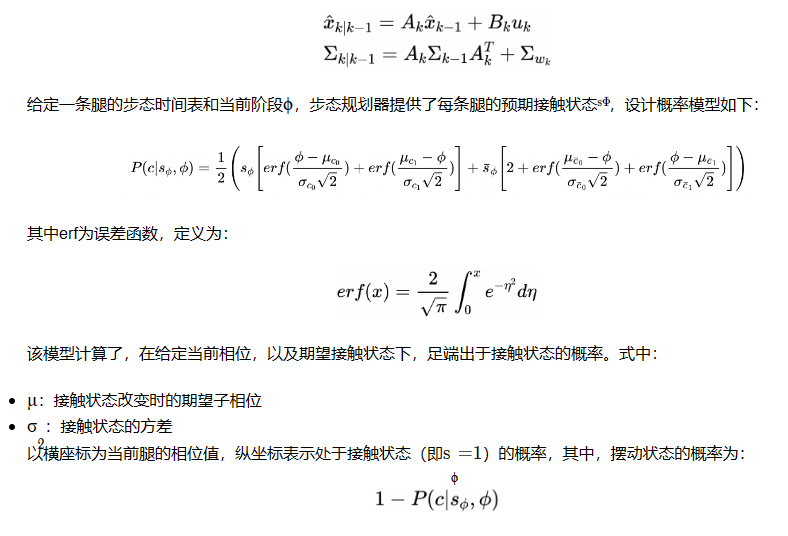
步態規劃 因為我們的四足機器人足端,是在不停地與地面接觸,懸空(擺動),所以這里說的步態規劃,其實指....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 17:33
?627次閱讀
這里簡單利用一個線性函數進行演示 取a=1,b=1,其圖像隨時間變化如下: 利用周期函數對時間進行調....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 17:24
?338次閱讀
0、步態規劃 四足機器人控制當中,步態是至關重要的一項。我們可以簡單理解成四足機器人運動過程中各腿的....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 17:17
?860次閱讀

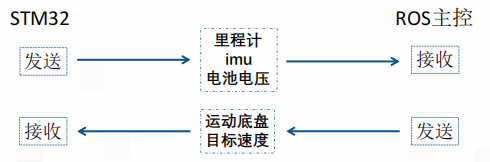
1.通信協議 控制指令格式(15字節) 2.ROS端 在ROS端,首先需要接收從其他節點的控制消息,....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 17:10
?599次閱讀

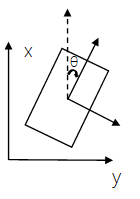
STM32端返回的x軸線速度、y軸線速度是相對于自身的機體坐標系的速度,而機器人的位置信息是相對于世....
![的頭像]() 麥辣雞腿堡 發表于
麥辣雞腿堡 發表于 11-16 16:58
?348次閱讀




 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

