 六自由度機械臂三次多項式插值法
六自由度機械臂三次多項式插值法
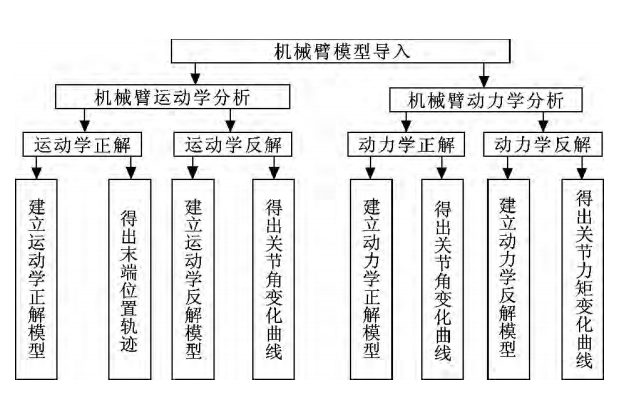
對串聯機械臂而言,軌跡規劃可以分為:關節空間軌跡規劃和笛卡爾空間軌跡規劃。關節空間軌跡規劃是把機器人的關節變量變換成跟時間的函數,然后對角速度和角加速度進行約束。
笛卡爾空間軌跡規劃是把機器人末端在笛卡爾空間的位移、速度和加速度變換成跟時間的函數關系。
由于在關節空間中進行軌跡規劃是直接用運動時的受控變量規劃軌跡,有著計算量小,容易實時控制,而且不會發生機構奇異性等優點,所以經常被采用。
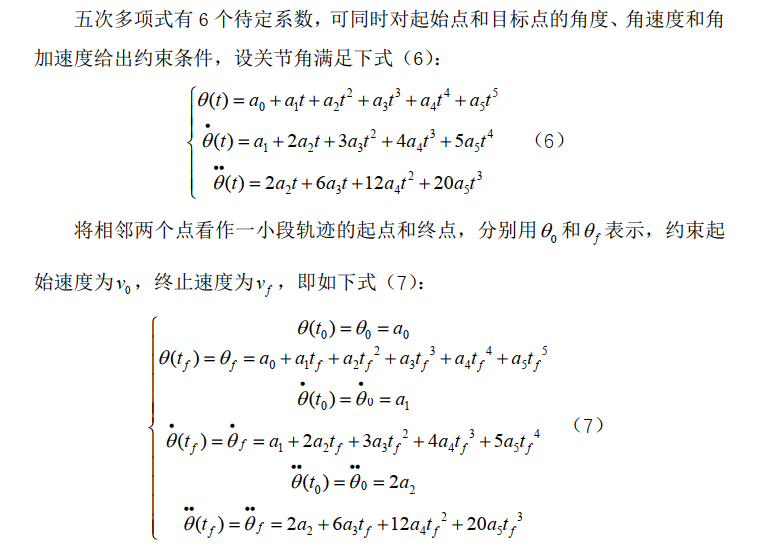
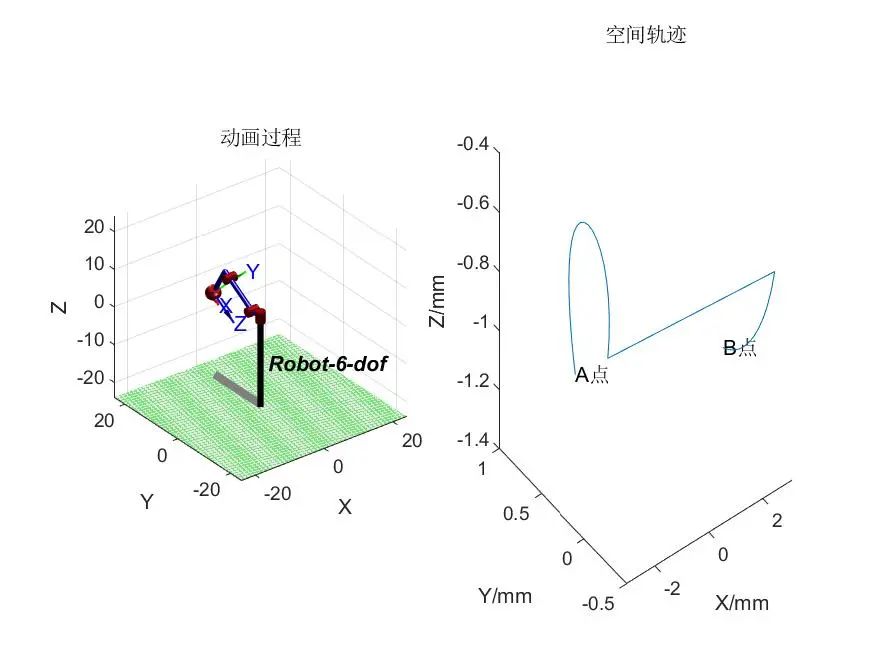
現以一維的軌跡為研究對象,利用三次多項式插值法和五次多項式插值法分別對其進行軌跡規劃,通過對比兩種插值法的效果,選取效果更優者對六自由度機械臂進行軌跡規劃。
** 三次多項式插值法**
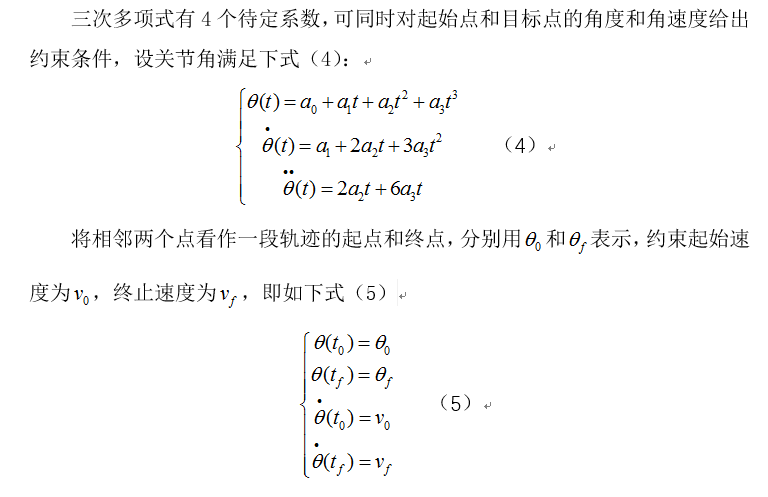
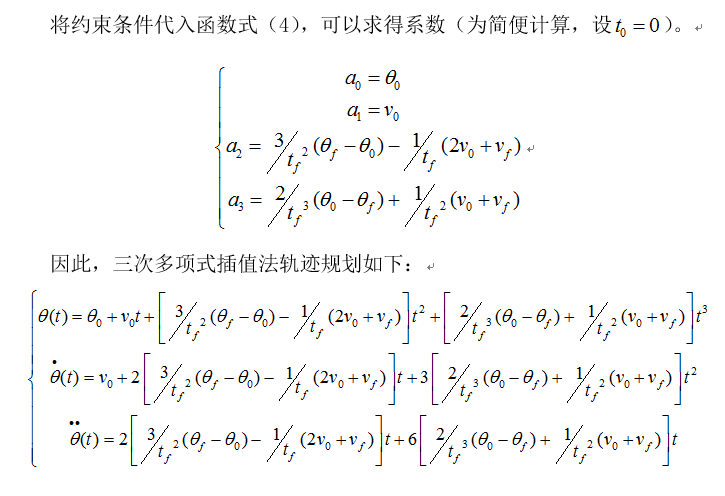
三次多項式有4個待定系數,可同時對起始點和目標點的角度和角速度給出約束條件。
數學推導
MATLAB代碼
%三次多項式插值法
clear;
clc;
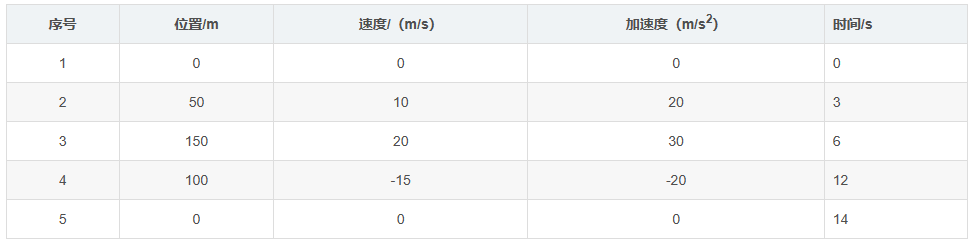
q_array=[0,50,150,100,0];%指定起止位置
t_array=[0,2,4,8,10];%指定起止時間
v_array=[0,10,20,-15,0];%指定起止速度
t=[t_array(1)];q=[q_array(1)];v=[v_array(1)];a=[0];%初始狀態
for i=1:1:length(q_array)-1%每一段規劃的時間
a0=q_array(i);
a1=v_array(i);
a2=(3/(t_array(i+1)-t_array(i))^2)*(q_array(i+1)-q_array(i))-(1/(t_array(i+1)-t_array(i)))*(2*v_array(i)+v_array(i+1));
a3=(2/(t_array(i+1)-t_array(i))^3)*(q_array(i)-q_array(i+1))+(1/(t_array(i+1)-t_array(i))^2)*(v_array(i)+v_array(i+1));
ti=t_array(i)+0.001:0.001:t_array(i+1);
qi=a0+a1*(ti-t_array(i))+a2*(ti-t_array(i)).^2+a3*(ti-t_array(i)).^3;
vi=a1+2*a2*(ti-t_array(i))+3*a3*(ti-t_array(i)).^2;
ai=2*a2+6*a3*(ti-t_array(i));
t=[t,ti];q=[q,qi];v=[v,vi];a=[a,ai];
end
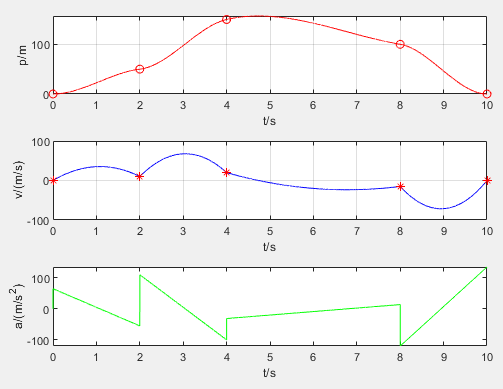
subplot(3,1,1),plot(t,q,'r'),xlabel('t/s'),ylabel('p/m');hold on; plot(t_array,q_array,'o','color','r'),grid on;
subplot(3,1,2),plot(t,v,'b'),xlabel('t/s'),ylabel('v/(m/s)');hold on;plot(t_array,v_array,'*','color','r'),grid on;
subplot(3,1,3),plot(t,a,'g'),xlabel('t/s'),ylabel('a/(m/s^2)');hold on;
% 指定文件夾保存圖片
filepath=pwd; %保存當前工作目錄
cd('C:UsersAdministratorDesktoppic') %把當前工作目錄切換到圖片存儲文件夾
print(gcf,'-djpeg','C:UsersAdministratorDesktoppicsan.jpeg'); %將圖片保存為jpg格式,
cd(filepath) %切回原工作目錄
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28632瀏覽量
207989 -
機械臂
+關注
關注
12文章
520瀏覽量
24671 -
六自由度機器人
+關注
關注
0文章
2瀏覽量
713
發布評論請先 登錄
相關推薦
6自由度機械臂點到點5次多項式插值軌跡規劃
([0 0.515 0pi/20]);L5=Link([pi00pi/20]);L6=Link([0 0.08000]);[q ,qd, qdd]=jtraj(q1,q2,50); %五次多項式軌跡,得到關節角度,角速度,角加速度,50為采樣點個數T=robot.fkin
發表于 03-13 10:09
采用LabVIEW實現四自由度機械臂運動控制系統設計
應用領域:控制設計挑戰: 短期內實現4自由度機械臂(3臺交流伺服電機、1臺微型直流電機)的 變參數同步運動控制,為鋼絲傳動機構的控制提供應用解決方案。應用方案: 方案采用NI公司
發表于 05-06 09:26

分享最好的機械臂是7個自由度的原因
現在用的最多的工業機器人,一般都是六軸的,但是最近推出來的人機協作機械臂,卻有7個自由度,一直想不明白為什么。直到最近看到知乎上的一個問題:人的手臂(腕關節到肩關節)有幾個

為什么最好的機械臂是7個自由度而不是6個自由度
現在用的最多的工業機器人,一般都是六軸的,但是最近推出來的人機協作機械臂,卻有7個自由度,一直想不明白為什么。
使用SimMechanics實現六自由度的機械臂仿真研究
,仿真功能強大,可以在模型中通過改變結構,優化系統參數,在仿真環境中分析結果。利用 SimMechanics 的上述優點,以工業六自由度機械臂 ER10 為研究對象,將 SolidWo
發表于 11-12 08:00
?1次下載





 工商網監
工商網監
評論