

該機械臂 6 個關節都是轉動關節,前 3 個關節確定手腕參考點的位置,后 3個關節確定手腕的方位。和大多數工業機器人一樣,后 3個關節軸線交于一點。因此將該點作為手腕的參考點,也選作為連桿坐標系{4},{5}和{6}的原點。如下圖示。
對于機械臂, 通常將之看作“連桿結構” ,連桿是由關節組合而成。因此在分析機械臂的時候需要為機械手的每一連桿建立一個坐標系。
在分析連桿坐標系時, 通常需要在每個連桿上定義一個固連的坐標系來表明每個連桿與相鄰連桿之間的相對位置關系。基于此原則,我們首先為各連桿和關節進行編號, 然后采用由下而上的順序,基座為連桿 0,從基座起依次向上為連桿 1、連桿 2、 …, 關節i 連接連桿i-1和i 。
最終建立與連桿固連的坐標系OiXi Yi Zi ,如下所示:
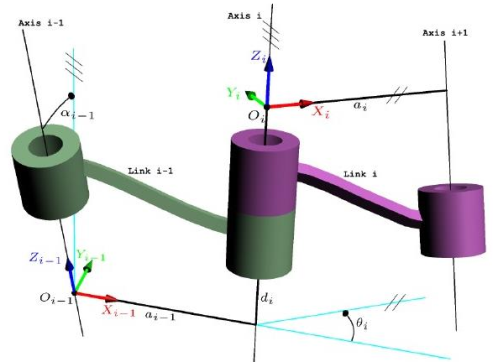
根據所設定的連桿坐標系, 相應的連桿參數可定義如下:
(1) 繞 xi-1軸旋轉αi-1角, 可使 zi-1軸與 zii軸同一平面;
(2)沿 xii-1軸平移距離αi-1, 可使 zi-1軸與 zi 軸同一高度上;
(3)繞 zi 軸旋轉θi 角, 可使 xi-1軸與 xi 軸同一直線上;
(4)沿 zi 軸平移距離 di, 可使連桿i -1的坐標系移動到其原點與連桿i 坐標系原點重合。
可根據改進的 D-H 示法, 對機械臂建立坐標系。 在改進 D-H 坐標系中, 坐標系{0}和{1}一般重合, O1 為軸 1 和軸 2 公法線在軸
1 上的交點,此時關節 1 和關節 2 在 z 軸向上的偏置沒有體現出來, 但對于整個機械臂各關節的相對運動來說并沒有影響。
選取第一關節坐標系與基坐標系重合。根據機械臂的結構和連桿坐標系,可得出其連桿參數和關節變量,如下表示:

-
機器人
+關注
關注
212文章
29242瀏覽量
210800 -
機械臂
+關注
關注
13文章
539瀏覽量
25119
發布評論請先 登錄
相關推薦
使用moveit控制真實機械臂的方法
眾為興SCARA四軸機械臂編程概述
機械臂的控制學習


如何選擇一款六軸機械臂作為入門(教育或者研究)機械臂?






 工商網監
工商網監

評論