學(xué)習(xí)了GPIO的輸入與輸出功能后,我們就可以做一些自動化的功能了。 硬件接線 比如我們同時連接一個按....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-27 14:28
?386次閱讀
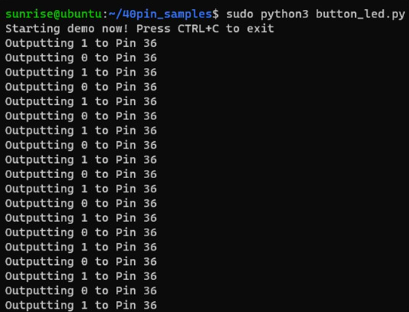
GPIO不止有輸入功能,還有輸出功能,大家應(yīng)該經(jīng)常看到電子設(shè)別上的LED燈吧,這就是典型的IO輸出控....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-27 14:22
?356次閱讀

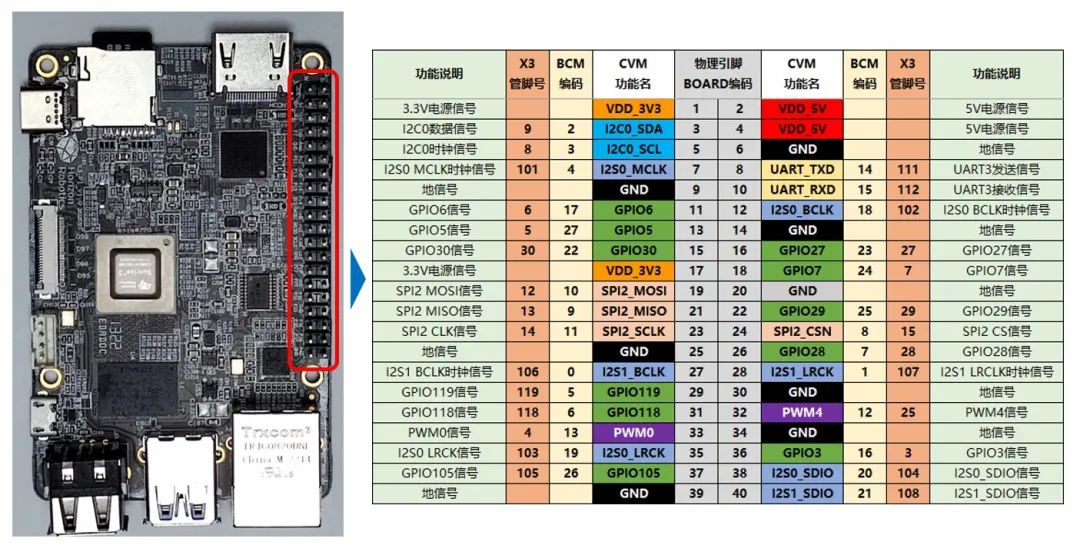
引腳復(fù)用配置工具 雖然從硬件上看,擴(kuò)展出來的引腳只有40個,不過大部分引腳還可以配置成多種功能,這樣....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-27 11:49
?418次閱讀
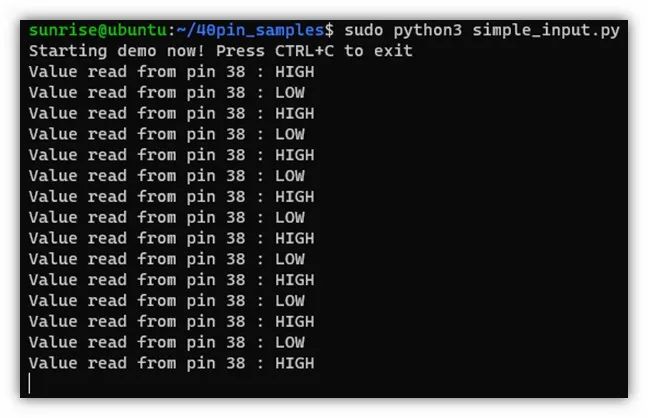
數(shù)字輸入與輸出是最常用的一種外設(shè)通信方式,雖然每一個端口只有0和1兩種狀態(tài),但卻可以組合出各種各樣的....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-27 11:45
?1047次閱讀
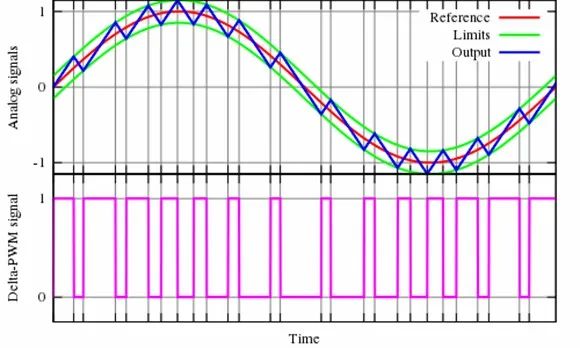
接下來我們就來試一試,通過PWM讓一個LED實(shí)現(xiàn)不同亮度的變化,也就是我們常見的呼吸燈了。 硬件接線....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-27 11:40
?993次閱讀

我們已經(jīng)可以用GPIO控制LED燈一閃一閃亮晶晶了,這樣只有亮和滅的狀態(tài)似乎還是太簡單了,能不能對L....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-27 11:37
?1090次閱讀
ros1: talker 注冊 listener 注冊 ROS Master 進(jìn)行信息匹配 list....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-27 11:26
?846次閱讀

基本概念: ROS是一個用于在不同進(jìn)程間匿名的發(fā)布、訂閱、傳遞信息的中間件。 ROS2系統(tǒng)的核心部分....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-27 11:21
?1855次閱讀
運(yùn)行示例程序 接下來就可以運(yùn)行串口通信的例程了。 $ sudo python3 test_seria....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-27 10:55
?415次閱讀
現(xiàn)在的傳感器和執(zhí)行器種類越來越多,需要和控制器傳輸?shù)臄?shù)據(jù)也是多種多樣,只用GPIO來控制和讀取的話,....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-27 10:51
?901次閱讀

ROS主控讀取stm32發(fā)送的數(shù)據(jù) 之后便可以通過 Stm32_Serial .read (Rece....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 17:49
?1111次閱讀
這里以一個智能車代碼工程為例,抽取串口通信部分代碼 在頭文件中,進(jìn)行串口頭文件的包含 # inclu....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 17:47
?1212次閱讀
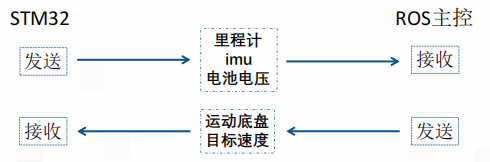
硬件連接 ROS主控通過usb線連接到一個TTL電平轉(zhuǎn)換芯片,再由這個電平轉(zhuǎn)換芯片連接STM32芯片....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 17:45
?1544次閱讀

以簡單的智能車為例,一般會存在兩個控制器,一個是運(yùn)行ROS的主控,另一個是運(yùn)行電機(jī)控制和傳感器信息采....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 17:38
?1333次閱讀
ROS Motion Planning運(yùn)動規(guī)劃庫采用了非常靈活和簡易的方式來按照我們的需求去進(jìn)行配置....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 17:35
?1691次閱讀

下載/克隆ROS Motion Planning運(yùn)動規(guī)劃庫 可以執(zhí)行以下兩條指令來從Github上克....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 17:29
?1218次閱讀
創(chuàng)建新的ROS工作空間 由于ROS Motion Planning運(yùn)動規(guī)劃庫與Navigation導(dǎo)....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 17:09
?1448次閱讀

簡單輸入對話框 simpledialog(簡單對話框)包含如下常用函數(shù): 實(shí)操代碼 """簡單對話框....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 17:05
?913次閱讀

文件對話框 文件對話框幫助我們實(shí)現(xiàn)可視化的操作目錄、操作文件. 將文件、目錄的信息傳入到程序中 文件....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 16:58
?869次閱讀

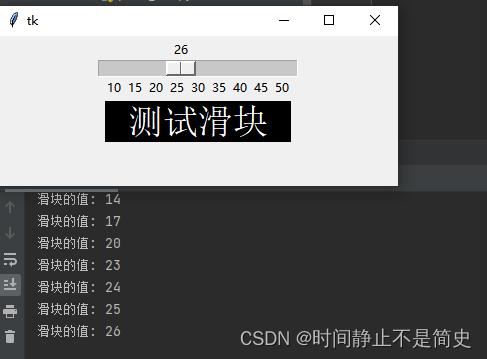
Scale 移動滑塊 Scale(移動滑塊)用于在指定的數(shù)值區(qū)間,通過滑塊的移動來選擇值 實(shí)操代碼 ....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 16:48
?1209次閱讀
大家好, 我是了不起, 歡迎收看我的冒險之旅。 今天我們將深入學(xué)習(xí)GUI圖形界面編程tkinter,....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 16:42
?1004次閱讀

當(dāng)然虛擬地址空間劃分不只是如此。因?yàn)槟壳皯?yīng)用程序沒有那么大的內(nèi)存需求,所以ARM64處理器不支持完全....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 16:35
?913次閱讀
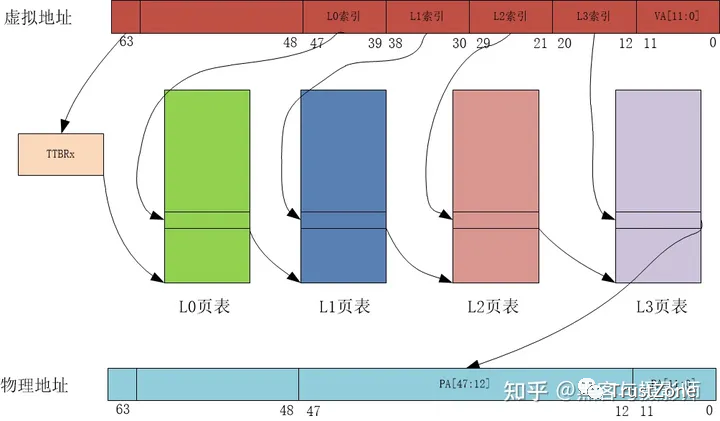
物理頁面大小一級地址總線寬度不同,頁表的級數(shù)也不同。以AArch64運(yùn)行狀態(tài),4KB大小物理頁面,4....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 16:28
?1007次閱讀
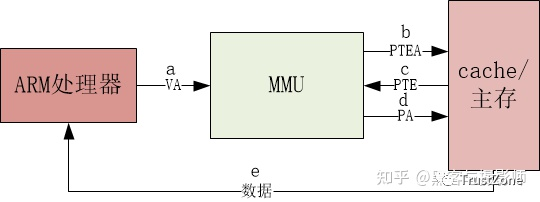
頁命中、缺頁 (1)頁命中 ? a) 處理器要對虛擬地址VA進(jìn)行訪問。 ? b) MMU的TLB沒有....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 16:19
?1190次閱讀
1-MMU相關(guān)的基本概念 (1)虛擬地址相關(guān)基本概念 ? 虛擬內(nèi)存(Virtual Memory,V....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 16:11
?724次閱讀
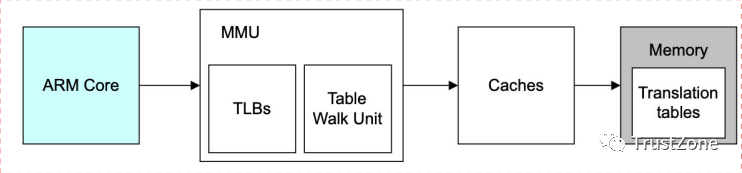
TWU table walk unit:包含從內(nèi)存中讀取translation tables的邏輯 ....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 16:04
?635次閱讀
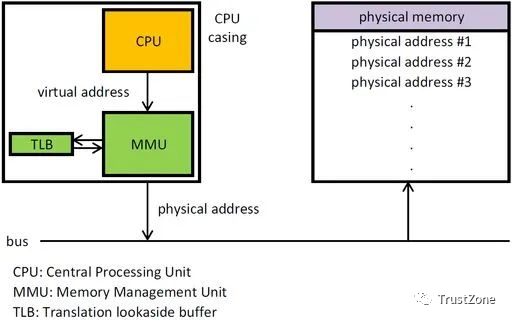
TLB 是 translation lookaside buffer 的簡稱。首先,我們知道 MMU....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 15:54
?785次閱讀
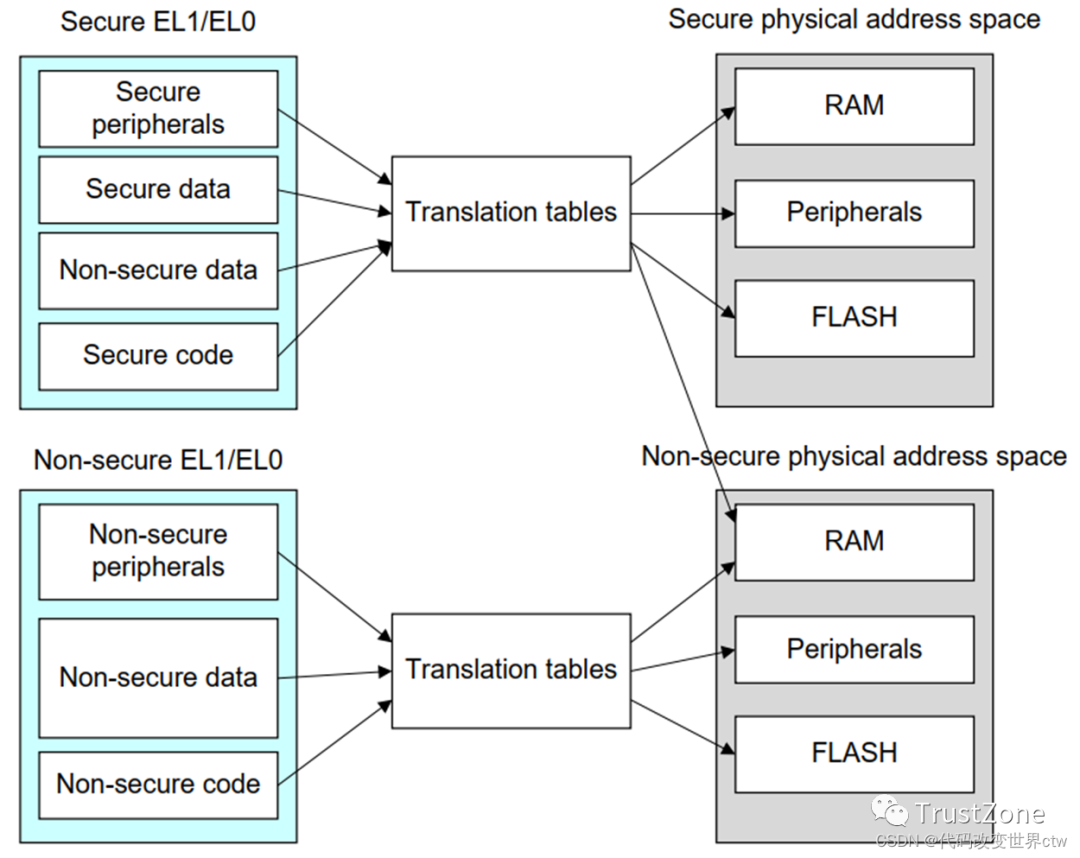
訪問權(quán)限控制 TrustZone技術(shù)之所以能提高系統(tǒng)的安全性,是因?yàn)閷ν獠抠Y源和內(nèi)存資源的硬件隔離。....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 15:47
?624次閱讀
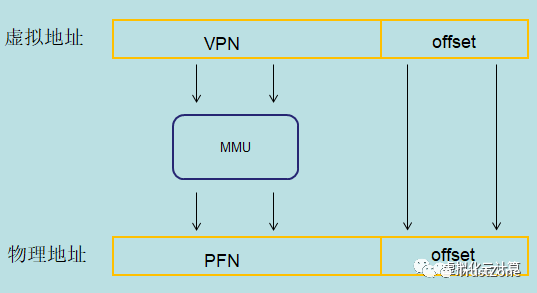
1-CPU發(fā)出的虛擬地址 CPU發(fā)出的虛擬地址由兩部分組成:VPN和offset,VPN(virtu....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 15:40
?717次閱讀
微觀理解 內(nèi)存管理單元(MMU)的一個重要功能是使系統(tǒng)能夠運(yùn)行多個任務(wù),作為獨(dú)立的程序運(yùn)行在他們自己....
![的頭像]() 麥辣雞腿堡 發(fā)表于
麥辣雞腿堡 發(fā)表于 11-26 15:36
?720次閱讀






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)