 ros的基本概念是什么
ros的基本概念是什么
基本概念:
ROS是一個用于在不同進程間匿名的發布、訂閱、傳遞信息的中間件。
ROS網絡是指在ROS系統中不同的節點間相互通信的連接關系。
ROS Graph這里翻譯成了ROS網絡,因為我覺得Graph更加抽象,而網絡的概念更容易幫助理解其內涵。
ROS網絡(ROS Graph)概念簡介:
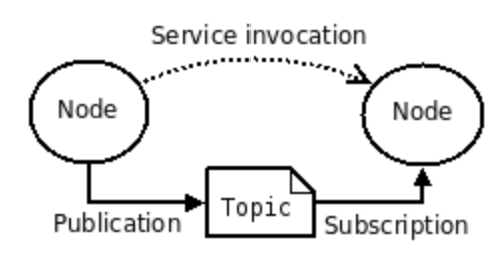
節點(Nodes):一個節點是一個利用ROS系統和其他節點通信的實體
消息(Messages):ROS中在訂閱和發布主題時所用到的數據結構
主題(Topics): 節點可以發布信息到一個主題,同樣也可訂閱主題來接收消息
發現(Discovery): 一個自動運行的進程,通過這個進程不同的節點相互發現,建立連接
節點(Nodes)
一個節點就是一個在ROS網絡中的參與者。
ROS節點通過ROS客戶端程序庫(ROS client library)來和其他節點進行通信。
節點可以發布或者訂閱主題 節點也可以提供ROS服務(Service)。
節點有很多可以配置的相關參數。
節點間的連接時通過一個分布式發現進程來建立的(即上面所說的發現)。
不同的節點可以在同一個進程里面,也可以在不同的進程里面,甚至可以在不同的機器上。
客戶端程序庫
ROS客戶端程序庫可以讓不同的語言編寫的節點進行通信。
在不同的編程語言中都有對應的ROS客戶端程序庫(RCL),這個程序庫實現了ROS的基本API。
這樣就確保了不同的編程語言的客戶端更加容易編寫,也保證了其行為更加一致。
下面的客戶端程序庫是由ROS2團隊維護的
rclcpp = C++ 客戶端程序庫
rclpy = Python 客戶端程序庫
另外其他客戶端程序也已經有ROS社區開發出來。可以看[[ROS 客戶端程序庫]]來了解詳細信息
發現
節點之間的互相發現是通過ROS2底層的中間件實現的。
過程總結如下:
當一個節點啟動后, 它會向其他擁有相同ROS域名的節點進行廣播,說明它已經上線。
ROS域名(ROS domain, 可以通過設置ROS_DOMAIN_ID環境變量來設置)
其他節點在收到廣播后返回自己的相關信息,這樣節點間的連接就可以建立了,之后就可以通信了。
節點會定時廣播它的信息,這樣即使它已經錯過了最初的發現過程,它也可以和新上線的節點進行連接。
節點在下線前它也會廣播其他節點自己要下線了。
節點只會和具有相兼容的[服務質量]設置的節點進行通信。
-
網絡
+關注
關注
14文章
7570瀏覽量
88819 -
客戶端
+關注
關注
1文章
290瀏覽量
16694 -
ROS
+關注
關注
1文章
278瀏覽量
17018
發布評論請先 登錄
相關推薦
ROS的基本概念和系統架構 ROS的安裝和簡單測試



智能天線的基本概念
ROS學習筆記之ROS基本概念





 工商網監
工商網監
評論