 ROS主控與STM32的硬件連接和軟件連接
ROS主控與STM32的硬件連接和軟件連接
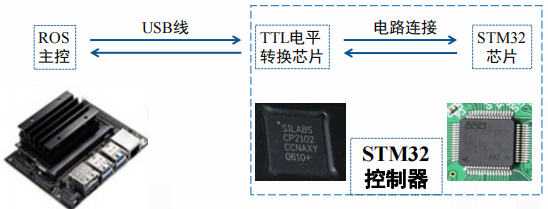
硬件連接
ROS主控通過usb線連接到一個TTL電平轉換芯片,再由這個電平轉換芯片連接STM32芯片
電平轉換芯片可以通過PCB設計在STM32芯片的電路板上,也可以使用一個USB轉TTL的模塊。
為什么兩個控制器之間需要電平轉換芯片?
因為兩個控制器之間通信層次邏輯是不同的,所有需要電平轉換芯片。相當于兩個主控是兩種不同語言的人,電平轉換芯片相當于一個翻譯。
電平轉換芯片可以是:
- cp2102
- ch340
- PL2303
- FT232RL
軟件設置
硬件連接上之后,需要一個軟件設置
需要軟件設置原因:
ROS主控可能接入多個USB設備,或者接入兩個型號一樣的電平轉換芯片。
不同USB設備占用的ROS主控的端口號在每次上電時可能會不一致,這樣需要手動修改代碼中的配置參數,比較麻煩,也無法做到自啟動。
如果存在多個USB設備,但是每種USB設備的電平轉換芯片不一樣,那么我們可以根據芯片名稱來知道端口 號,但是如果有兩個芯片一樣的電平轉換芯片,則無法區分,這時候想做自啟動那么必須要進行下面步驟的軟件設置
軟件設置分為兩步:
- 第一步是更改電平轉換芯片的serial,
- 第二步是創建設備別名
更新電平轉換芯片的serial
首先在win環境下安裝更改芯片serial的軟件
CP21xx Customization Utility.exe
打開這個軟件,然后將芯片連接電腦的USB

然后將圓圈位置改為0002
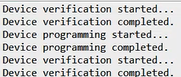
然后點擊Program Device點完之后要等下,在Status Logging窗口中出現下面信息,才說明修改好了
創建設備別名
需要創建設備別名原因:
在運行一個ros程序的時候需要提供一個端口名,這個端口名一般是ttyUSBx,設備每次插拔對應的這個端口名它都會不一樣,需要創建一個設備別名,就是要將這個端口名來給它固定住。

重新插拔 USB1端口的設備后,變為:

可以看到變成了/dev/ttyUSB2
端口號發生了變化
創建設備別名需要寫一個腳本文件,如下:
echo 'KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60",ATTRS{serial}=="0002", MODE:="0777", GROUP:="dialout", SYMLINK+="stm32_controller"' >/etc/udev/rules.d/stm32_controller.rules
echo 'KERNEL=="ttyUSB*", ATTRS{idVendor}=="10c4", ATTRS{idProduct}=="ea60",ATTRS{serial}=="0001", MODE:="0777", GROUP:="dialout", SYMLINK+="2d_lidar"' >/etc/udev/rules.d/2d_lidar.rules
service udev reload
sleep 2
service udev restart
解釋下上面的代碼
KERNEL==”ttyUSB* 不管是USB幾的設備都進行判斷
ATTRS{idVendor}==”10c4” 這里的idVendor ,在前面win上修改 serial的時候出現過,就是10c4

ATTRS{idProduct}==”ea60” 這里的idProduct,在前面win上修改 serial的時候出現過,就是ea60

ATTRS{serial}==”0002” 這里的serial,就是前面我們改過的,這里就根據這個值的不同,定義不同的設備別名
MODE:=”0777” 就是端口的權限
SYMLINK+=”stm32_controller” 這里的stm32_controller,就是取的設備別名。
所有上面第一行代碼的功能就是,將滿足這些條件的端口的設備名稱改為定義的設備別名。
腳本的文件名稱,取名為change_udev.sh。在執行前需要給這個腳本文件賦予權限。
sudo chmod 777 change_udev.sh
賦予權限后,再運行這個腳本
sudo ./change_udev.sh
這樣就運行了設備別名的設置,之后不管怎么插拔這兩個USB設備,系統都將會自動的將這兩個設備去給它賦予設置的設備別名。
-
STM32
+關注
關注
2270文章
10910瀏覽量
356671 -
硬件
+關注
關注
11文章
3350瀏覽量
66321 -
軟件
+關注
關注
69文章
4978瀏覽量
87779 -
ROS
+關注
關注
1文章
278瀏覽量
17037
發布評論請先 登錄
相關推薦

RT-Thread如何使用串口或者無線和ROS連接
【ROS RIKIBOT基礎--使用系列 第一章節】ROS機器人硬件系統 精選資料分享
stm32cubemx的ST-link v2硬件連接與軟件設置如何去實現呢
STM32 SPI 軟件NSS和硬件NSS解讀

ROS與STM32通信
ROS小車STM32底層控制代碼
以STM32F405為主控連接兩顆MAX3051EKA CAN通訊芯片
DB4759 STM32 用于STM32CubeUSB的電源傳輸和UCSI(USB Type-C?連接器系統軟件接口軟件擴展





 工商網監
工商網監
評論