") ROS核心框架介紹
ROS核心框架介紹
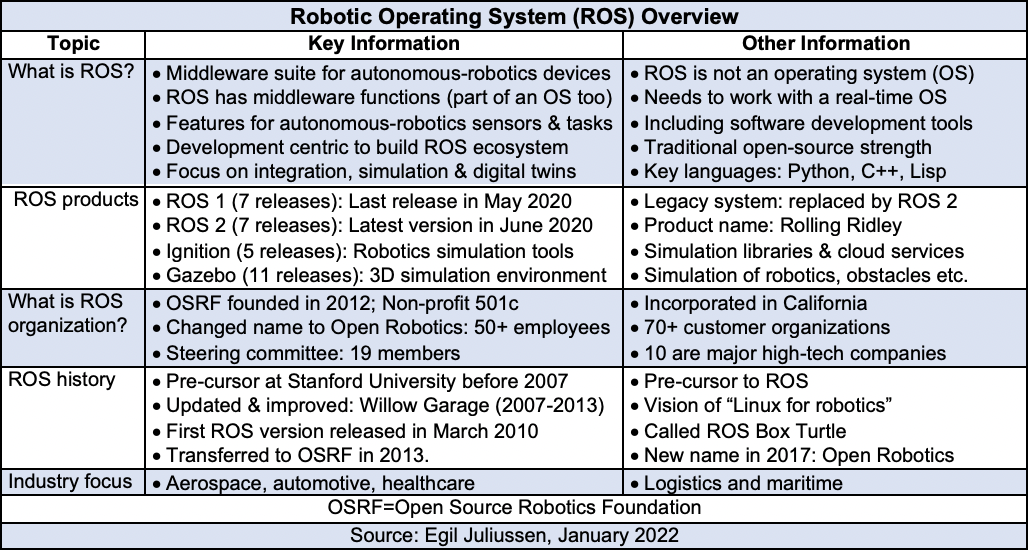
ROS核心框架
對于第一個問題,我也沒仔細研究過源碼,核心代碼基本由python和C++組成,運用了xmlrpc機制,每個運行的節(jié)點可以理解成一個進程。進程間通訊有些是共享內存的方式(比如message_filter),有些應該是通過socket。
不過ROS的核心框架也就是ros-base主要由Willow Garage公司和一些開發(fā)者設計、提供以及維護,它提供了一些分布式計算的基本工具。
sudo apt install ros-melodic-ros-base
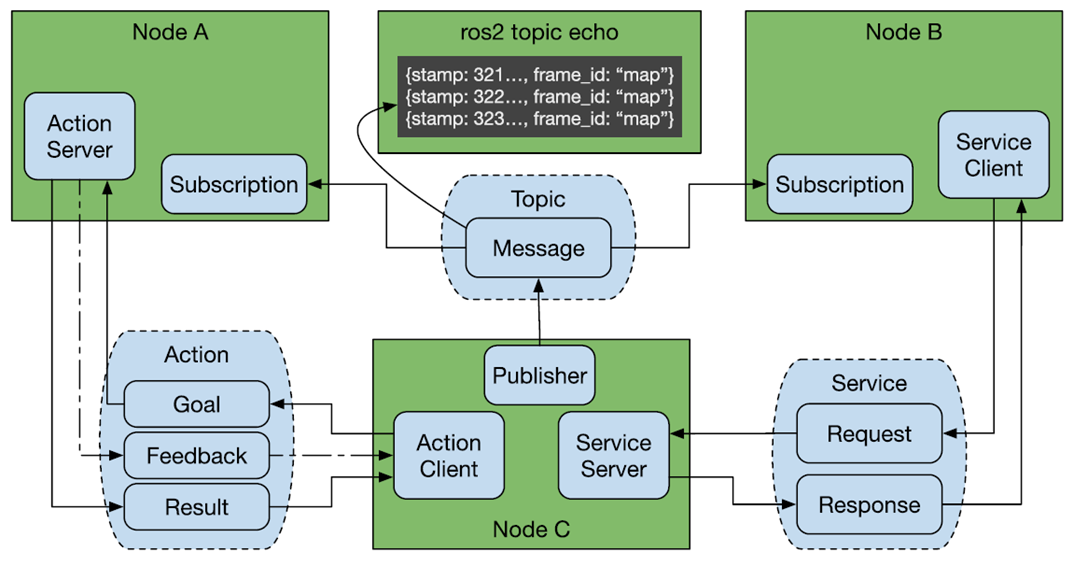
分布式計算框架可以理解為ROS的所有節(jié)點運行時需要一個主控制器ROS Master(通過roscore指令開啟),ROS Master通過RPC(Remote Procedure Call Protocol,遠程過程調用)提供了登記列表和對其他計算圖表的查找。
沒有控制器,節(jié)點將無法找到其他節(jié)點,交換消息或調用服務。節(jié)點與節(jié)點之間的連接是直接的,控制器就像一個DNS(Domain Name System)服務器。

ROS的框架還是挺復雜的,光看一些理論性的介紹可能還有點概念,但真正去實現(xiàn)里面肯定還有不少細節(jié)問題。
真正在應用ROS框架時,其實也有一些不足的地方,比如:
1、ROS節(jié)點相互之間通信時如何知道另外一個節(jié)點的狀態(tài),是宕掉了還是正常,因為它強依賴于于中心節(jié)點ROS Master。本身在系統(tǒng)中頻繁創(chuàng)建話題就不是一件很好的事,會造成多少內存碎片。
在使用ros::Subscriber sub = n.subscribe(“chatter”, 1000,chatterCallback)時,這個1000是隊列消息的緩存數(shù)目,如果是圖像或者點云比較大的數(shù)據(jù),就不要隨便寫1000了,不然內存會被消耗光。
2、系統(tǒng)中存在大量話題和數(shù)據(jù)時,本地傳輸?shù)臄?shù)據(jù)延時大而不確定,遠程傳輸?shù)臄?shù)據(jù)更是受帶寬和處理性能的影響。對于機器人的控制而言,想要達到精確更多,通信延時就要做得更小,而ROS這種通信機制實時性和穩(wěn)定性不太好。
3、ROS的msg采用md5碼去進行校驗,如果一個人改了沒通知另外一個人,經(jīng)常導致另外一個人的包運行不起來的尷尬局面。
4、ROS與可視化界面通信時,有時不知道是界面還是ROS機制問題,界面會莫名閃退(rviz就經(jīng)常出現(xiàn)這樣的問題)。
5、關于ROS的動態(tài)參數(shù)保存問題,比如在rqt_reconfigure上調好的參數(shù)如何在重啟roscore后加載調試后的參數(shù)。我曾花費過很久的時間,參見《在ROS中處理yaml文件》和《ROS動態(tài)調參(dynamic
reconfigure)客戶端服務端之C++ Python實現(xiàn)》
但也沒有很好地解決。很多功能可能僅適用于給開發(fā)者用,但當作產(chǎn)品去使用還是有很多地方值得去優(yōu)化。
-
機器人
+關注
關注
212文章
28938瀏覽量
209722 -
主控制器
+關注
關注
2文章
29瀏覽量
10969 -
ROS
+關注
關注
1文章
282瀏覽量
17257
發(fā)布評論請先 登錄
相關推薦
Micro-ROS:把ROS2放在MCU上
ROS與STM32之間的聯(lián)系
【ROS RIKIBOT基礎--使用系列 第一章節(jié)】ROS機器人硬件系統(tǒng) 精選資料分享
分享一份RK3308開發(fā)板ROS使用手冊指南
ROS的含義與機器人操作系統(tǒng)ROS的介紹
AV開發(fā)人員所采用的ROS框架簡介
ROS基本介紹

ROS1的通信架構的基礎通信方式及相關概念

ROS/ROS 2 介紹
Unity與ROS鏈接介紹

ROS的擴展有哪些方法
ros的基本概念是什么
ROS通信接口機制介紹
SLAMWARE ROS SDK的基礎架構、部署方法和應用示例介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論