

















四輪獨立驅(qū)動電動車高速CAN網(wǎng)絡(luò)數(shù)據(jù)分析技術(shù)
伴隨著電動汽車的發(fā)展,CAN總線通訊技術(shù)應(yīng)用越來越廣泛,它可為純電動汽車上四輪獨立驅(qū)動控制,以及剎車防抱死系統(tǒng)(ABS)、電子穩(wěn)定裝置(ESP)等主動安全系統(tǒng)的實現(xiàn)提供便利。
在設(shè)計CAN總線通信系統(tǒng)時,總要面臨著CAN數(shù)據(jù)的診斷與分析問題,不能解決該問題,便不能完成設(shè)計。本文基于Kvaser Leaf Professional HS這一USB_CAN工具,借助于Visual Basic環(huán)境,在PC機上開發(fā)出數(shù)據(jù)分析系統(tǒng),并在該分析系統(tǒng)與四輪獨立驅(qū)動電動車電機控制板之間實現(xiàn)了CAN通信。通過對CAN總線數(shù)據(jù)進行診斷分析,能夠更好地完成CAN總線系統(tǒng)的設(shè)計。
四輪獨立驅(qū)動電動車控制策略
電動車實物模型中使用的分布式四輪電子差速系統(tǒng)由一個中央控制器、四個電動輪控制器及CAN總線網(wǎng)絡(luò)三個部分組成,其在電動車實物模型上的布局如圖1所示。
圖1 分布式四輪電子差速系統(tǒng)在車身上的布局
在該分布式系統(tǒng)中,基于四輪獨立控制的電子差速算法被分為整車差速算法與轉(zhuǎn)速控制算法兩個部分,其中轉(zhuǎn)速控制算法是針對每個電動輪轉(zhuǎn)速。中央控制器與四個電動輪控制器通過CAN總線連
接成一個實時控制網(wǎng)絡(luò)。
在該系統(tǒng)控制過程中,中央控制器通過A/D采樣獲得來自轉(zhuǎn)向傳感器的車輛轉(zhuǎn)向角度信號和來自手柄轉(zhuǎn)把中的車速設(shè)定信號,經(jīng)過整車差速算法,分別獲得四個車輪當(dāng)前各自應(yīng)有的轉(zhuǎn)速,并將這一結(jié)果作為當(dāng)前時刻對應(yīng)車輪的轉(zhuǎn)速控制設(shè)定值,通過CAN總線發(fā)送給相應(yīng)的電動輪控制器。四個車輪控制器以從 CAN總線收到的轉(zhuǎn)速設(shè)定值作為控制目標(biāo),使用電動轉(zhuǎn)速控制算法對各自的電動輪進行控制,使各個電動輪的實際轉(zhuǎn)速實時滿足整車差速算法的要求,進而實現(xiàn)電動車輛的平順轉(zhuǎn)向。
四輪獨立驅(qū)動電動車CAN控制網(wǎng)絡(luò)
通過CAN總線,本四輪驅(qū)動電動車中央控制器將車輪的速度等設(shè)定值傳送給每個車輪的控制器,同時,各電機控制器將實際轉(zhuǎn)速等信息通過CAN總線反饋給中央控制器。CAN網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)如圖2所示。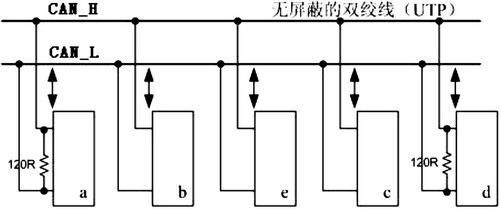
圖2 CAN控制網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)
整個網(wǎng)絡(luò)中共含有五個CAN節(jié)點:四個電動輪電機控制器a、b、c、d,以及一個電動車中央控制器e。
在設(shè)計應(yīng)用層協(xié)議時,必須根據(jù)實際應(yīng)用為總線消息編排一個合理的總線仲裁優(yōu)先順序,以改善CAN通訊的實時性。在本應(yīng)用場合中,下行數(shù)據(jù)即中央控制器發(fā)給各電動輪電機控制器的控制命令,比上行數(shù)據(jù)即各電動輪電機控制器的反饋信息具有更高的優(yōu)先級。此外,中央控制器發(fā)往四個車輪控制器的指令必須同步,才能為后續(xù)控制提供可靠的前提。
綜合考慮以上因素,本文設(shè)計了如表1所示的CAN數(shù)據(jù)報文ID體系。
電機控制器a、b、c、d分別控制電動車左前輪、右前輪、左后輪和右后輪。中央控制器發(fā)出的CAN消息數(shù)據(jù)域結(jié)構(gòu)如圖3所示。
圖3 中央控制器CAN消息數(shù)據(jù)域結(jié)構(gòu)
中央控制器發(fā)出的ID為0x010和0x020的CAN數(shù)據(jù),表示轉(zhuǎn)速以及轉(zhuǎn)矩的設(shè)定值,對應(yīng)的實際值為模擬量,這里采用了16位長度的有限精度定點數(shù)表示。16位數(shù)據(jù)中高9位表示整數(shù),低7位表示小數(shù),即9Q7格式的定點數(shù)。對于中央控制器發(fā)出的ID為0x00F的CAN數(shù)據(jù),發(fā)給每一個電機控制器的命令也是16位的數(shù)據(jù),低8位表示剎車命令,高8位表示控制模式選擇命令。
四個電機控制器向中央控制器反饋當(dāng)前狀態(tài)信息的CAN消息數(shù)據(jù)域結(jié)構(gòu)如圖4所示。
圖4 電機控制反饋狀態(tài)信息結(jié)構(gòu)
CAN總線消息的觸發(fā)方式有兩種:事件觸發(fā)與時間觸發(fā)。前者適用于發(fā)送時間上離散變化的開關(guān)狀態(tài)量,如剎車命令與控制模式選擇命令;后者適用于發(fā)送時間上連續(xù)變化的模擬量,如轉(zhuǎn)速設(shè)定值與轉(zhuǎn)矩設(shè)定值。由于本控制系統(tǒng)中兼有上述兩類總線信息,故采用事件觸發(fā)與時間觸發(fā)相結(jié)合的方式來進行發(fā)送。
Kvaser Leaf Professional HS簡介
Kvaser Leaf Professional是用于CAN和LIN的單通道USB接口,該設(shè)備提供了把幾個接口簡單接入PC的可能性,可以方便地實現(xiàn)同一個USB Hub上連接多個Kvaser Leaf設(shè)備,并且無需額外的連接。此外,它還具有很好的EMC(Electro Magnetic Compatibility)性能以及即插即拔的特點。同時,由于一個USB Hub上可以連接多個設(shè)備,因此各個設(shè)備都可以由該Hub進行供電,具有很低的功耗。
Kvaser提供的庫函數(shù)非常豐富,用戶可以根據(jù)自己的需要調(diào)用相應(yīng)的庫函數(shù),靈活地處理CAN總線數(shù)據(jù)。









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
用戶評論
共 條評論