物聯網開發過程中遇到的棘手問題是:如何讓設備連接上云?設備接入主要是開發者要實現設備與云平臺進行連接、數據上報/透傳、命令控制等過程。接入云平臺的設備一般分為兩類:第一類:設備具備聯網能力,并且支持
2024-03-05 08:24:40 74
74 
SDK 是 3.6 版,不支持 CYPD6127 部件。
那么,我能在 Meteor Lake 平臺上使用 SDK 3.5 嗎?
SDK 3.5 - 平臺選擇有"MTL" 關鍵字 :
2024-03-04 06:32:32
請問一下,百度文庫資料里面,下圖所示的系統鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發環境嗎?與前面4GB版本的鏡像有什么區別?
2024-03-01 23:06:01
更新SDK后提示 “@ohos.application.Ability”/“@ohos.application.AbilityStage”等模塊找不到或者無相關類型聲明
問題現象
更新SDK后報錯
2024-02-18 17:17:18
現在。直接買100開發板,別買101模組,除非你有別的愛好。
05.其他
其實目前的模組還有很多,前端時間只要注冊個人小米開發者,送一塊小米的WIFI開發板,支持小米的SDK開發,就是連接到小米平臺
2024-02-07 17:56:44
的核心標準。 目前主流的掃地機器人導航避障技術路徑為雙目視覺、激光雷達、3D結構光(線激光)三條,每條技術路徑都存在著各自的特點。 視覺方案 掃地機器人所配備的視覺避障技術通常采用雙目攝像頭,依據三角測量原理,通
2024-02-01 16:01:00210 設置ROS環境變量是使用ROS的重要步驟之一。本文將詳細介紹如何設置ROS環境變量,包括什么是環境變量、為什么要設置ROS環境變量、如何設置ROS環境變量等。 什么是環境變量 環境變量是一種操作系統
2023-12-28 13:52:42295 挑戰,包括激光雷達、單目測距和雙目視覺技術等。在當前的高級輔助駕駛技術(ADAS)中,雙目視覺技術在距離檢測方面表現出色,它可以精確地測量物體的距離,提供更客觀的數據。
為了應對這一需求,設計了一種
2023-12-19 18:02:07
雙目測寬儀是基于機器視覺原理及模擬人的雙眼進行寬度尺寸自動測量的儀器,是一種高度自動化的工業實時在線寬度檢測儀表。
雙目測寬儀是一種智能化的全自動工業在線實時寬度檢測設備,兩個工業相機就像人的雙眼
2023-12-04 17:10:35
1.添加ROS軟件源 將下面這條命令復制到ubuntu的終端執行 sudo sh -c '. /etc/lsb-release echo "deb http
2023-12-01 16:14:26317 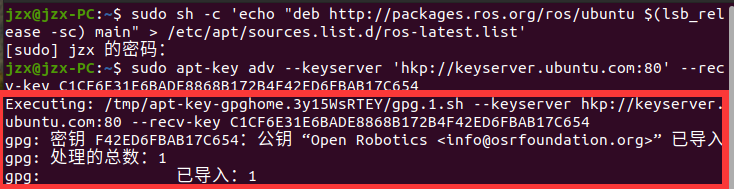
安裝ROS2功能包 接下來,還有一個很重要的配置,那就是安裝ROS2功能包,我們說TogetherROS是基于ROS2深度優化的,很多模塊還是會復用ROS2中的功能,所有ROS2的原生功能也可以支持
2023-12-01 16:02:24326 
特定硬件加速器優化的數據格式進行工作。經過適配的類型用于處理圖形,以消除 CPU 和內存加速器之間的內存拷貝。 通過 類型協商 ,處理圖中的不同 ROS 節點可以公布其支持的類型,ROS 框架也可以選擇
2023-11-30 19:35:01254 
庫的支持,ROS系統提供豐富且功能強大的機器人算法庫,如坐標變換、運動控制等。機器人開發者可根據開發需要,簡單快捷地調用合適的算法庫,以提高開發效率,加快開發進程。
(2) 開源免費,架構精簡ROS系統
2023-11-30 16:01:01
雙目測寬儀是機器視覺原來制造而成的智能寬度檢測設備,廣泛應用于板材類產品的寬度檢測。通過測寬儀的使用,實時了解產品寬度品質,進行超差提示,減少廢品的生產。
雙目測寬儀優勢
測量軟件界面顯示:產品規格
2023-11-28 17:13:06
如果你是一個ROS2的開發者,可能對剛才我們使用的ROS2命令比較熟悉,這時你可能也會產生一個問題:我們之前也安裝了ROS2系統,那ROS2的原生功能還可以正常運行么? 我們再來試一試ROS2中自帶
2023-11-28 16:29:18327 
ros1: talker 注冊 listener 注冊 ROS Master 進行信息匹配 listener 發送鏈接請求 talker 確認請求 建立連接 talker 給 listener
2023-11-27 11:26:02266 
基本概念: ROS是一個用于在不同進程間匿名的發布、訂閱、傳遞信息的中間件。 ROS2系統的核心部分是ROS網絡(ROS Graph)。 ROS網絡是指在ROS系統中不同的節點間相互通信的連接
2023-11-27 11:21:15782 配置ROS驅動功能包 將WHEELTEC 100N的 ROS_SDK 保存在工作空間的src文件夾下。 通過 catkin_make 進行編譯。 剛裝的ros環境會報錯,如下: Make Error
2023-11-22 18:13:34512 
TF命令行操作 ROS中的TF該如何使用呢?我們先通過兩只小海龜的示例,了解下基于坐標系的一種機器人跟隨算法。 小海龜跟隨例程 這個示例需要我們先安裝相應的功能包,然后就可以通過一個launch文件
2023-11-22 17:24:14240 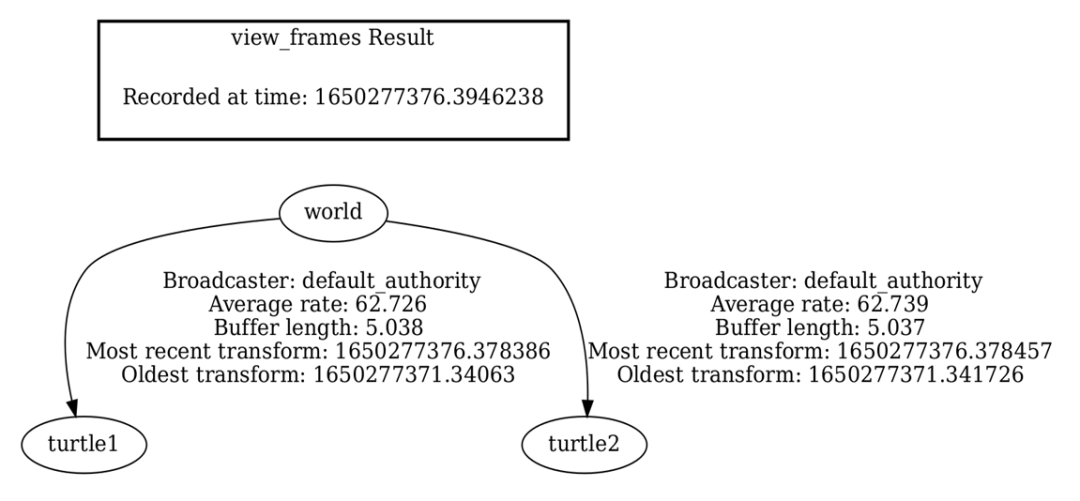
ROS的擴展 ROS除了本身框架性的東西以外,最大的特色就是能融合很多其他的東西,形成一個機器人開發生態圈,難怪ROS名為機器人操作系統,使命是powering the world‘s robots
2023-11-21 18:12:20321 ROS核心框架 對于第一個問題,我也沒仔細研究過源碼,核心代碼基本由python和C++組成,運用了xmlrpc機制,每個運行的節點可以理解成一個進程。進程間通訊有些是共享內存的方式(比如
2023-11-21 18:07:24388 
相機就像人的雙眼,可以形成立體視覺,這樣就可以得到足夠的信息判斷被測物的距離,修正和消除距離變化對測量的影響。
雙目測寬儀是新研發的一種寬度檢測設備,采用立體機器視覺原理檢測,利用算法消除傾斜等
2023-11-20 17:25:38
連接到主機處理器。各項功能由相應的SDK 支持,該模組已適配OPEN CV 開發環境,并有各個攝像頭之間內外參完整標定數據源,用戶可以輕松地利用OPEN CV 開
2023-11-17 17:55:38
對于ROS而言,其最常用的就是Topic話題以及Service兩個了。之前我們在了解Unity Robotics Hub時候就了解到基本的Unity和ROS的通訊,下面我們來詳細介紹一下Unity
2023-11-17 17:22:25279 
Simulink對機器人操作系統(ROS)的支持使我們能夠創建與ROS網絡一起工作的Simulink模型。ROS是一個通信層,允許機器人系統的不同組件以消息的形式交換信息。 組件通過將消息發布到特定
2023-11-15 17:26:46224 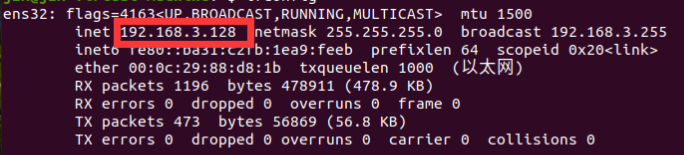
前言:一直都覺得ROS很神秘,到底是個操作系統,僅憑稱呼就讓我望而卻步了。但ROS和自動駕駛仿真有著千絲萬縷的聯系,作為仿真軟件和智駕算法的數據橋梁,ROS是個繞不開的話題,所以還是得硬著頭皮啃一啃。然后用大白話講給你聽,最好再做兩個小栗子,那可真是功德無量了。
2023-11-15 12:42:031511 
OneNET的NB模組用AT指令怎么連上ONENET平臺?
2023-11-01 06:05:16
現在市面上最常見的還是USB攝像頭,物美價廉,要想使USB攝像頭在ROS下正常工作,我們就需要一個軟件包來支持,現在ROS下最常用的usb攝像頭軟件包就是usb_cam了,簡單理解該軟件包就是V4L(Video for Linux)USB攝像頭驅動在ROS在的一個移植版本。
2023-10-29 11:26:29313 
paddle_inference_ros_demo功能包是基于paddle_inference_ros開發的,幫助開發者快速體驗paddle_inference在ROS環境下的推理部署效果的功能包。可以直接進入該項目鏈接進行查看和快速體驗。
2023-10-20 17:02:07265 
【KV260視覺入門套件試用體驗】四、KV260 視覺入門套件和固件更新
一、KV260 視覺 AI 入門套件
Xilinx? Kria? KV260 視覺 AI 入門套件由K26 系統級模塊
2023-10-17 08:28:19
使用FPGA的靈活性,提供了多種的AI開發固件,可以讓開發者測試使用FPGA支持的多媒體能力,并且開發板提供了基于FPGA的開發SDK,使得在該開發平臺上快速開發AI應用。 ReID行人重識別(Person
2023-10-09 01:32:12
目前在使用ros2的humble版本,但使用中感受到的編譯速度慢,node啟動速度慢等體會是比較影響ROS2的普及速度的,KV260因為內部存在FPGA模塊,可以實現硬件加速(accelerated
2023-10-08 23:42:52
Choose Task:[請輸入括號內的數字]
---眾多工具,等君來用---
ROS相關:
[1]:一鍵安裝(推薦):ROS(支持ROS/ROS
2023-10-04 23:35:18
SDK 是一種構建在開源且被廣泛采用的 GStreamer 框架上的應用框架。這種SDK 設計上支持跨
所有賽靈思平臺的無縫開發,包括賽靈思 FPGA、SoC、Alveo 卡,當然還有 Kria
2023-09-26 15:17:29
的 API,而不需要下載多個 SDK。對于某些設備不支持的 API 的情況,開發者可通過 canIUse() 函數判斷。
隨著時間的推移,鴻蒙系統會發布新的版本,每個版本都會有配套的 API 更新
2023-09-19 15:45:38
什么是ST MC SDK5.x?ST MC SDK5.x支持的MCU及硬件評價板?ST MC SDK5.x固件介紹?ST MC SDK5.2圖形化人機界面 MotorControl WorkBench?ST MC SDK5.x 電動機參數測試?ST MC SDK5.x 參考資料列表
2023-09-18 11:08:49 1
1 的提取算法,后端是局部地圖的維護、閉環矯正與全局地圖的更新。在 TUM 數據集測試中,其最高精度可達 1cm。我司基于該框架研發算法,實現雙目視覺與 IMU 數據的融合,精準計算位移距離并給出可靠的實時
2023-09-18 10:12:49440 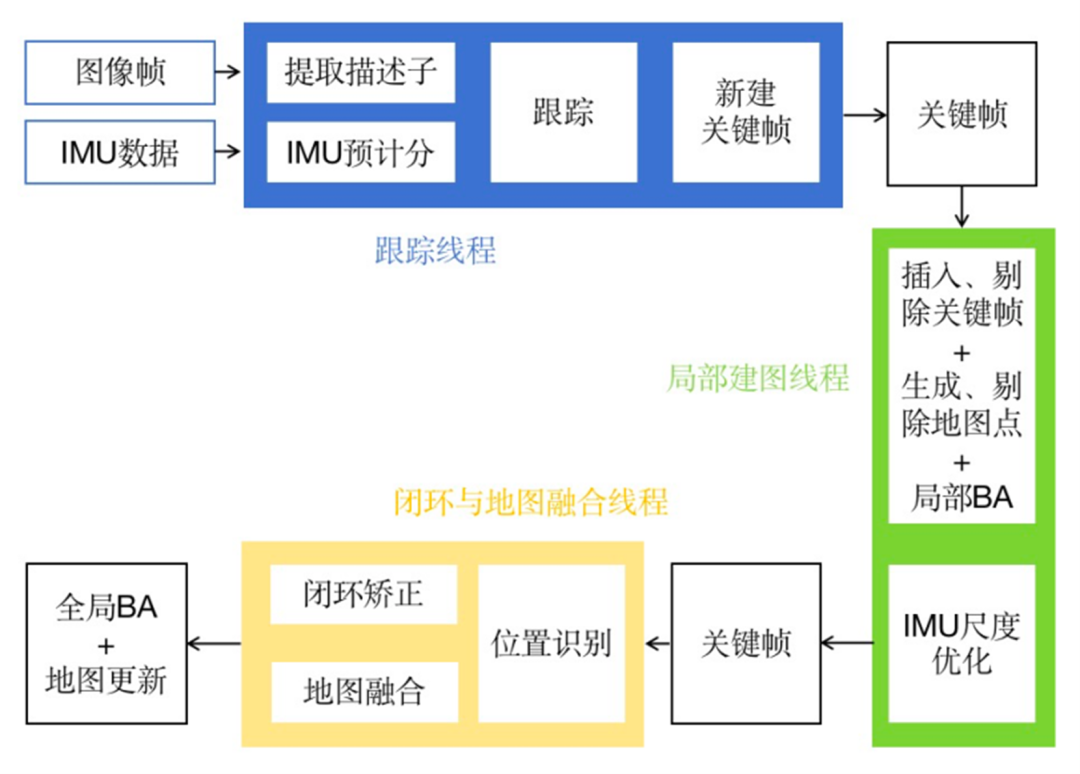
有rolling,目前也可以看到一些博文使用的是rolling版本的ros2
b.KRS想著的包比較多,很多包也還在不斷更新中,甚至可能開發板推出時某些包的開發還未完成
c.KRS涉及ROS2 嵌入式
2023-09-17 00:13:54
理解了序列化,再回到ROS。我們發現,ROS沒有采用第三方的序列化工具,而是選擇自己實現,代碼在roscpp_core項目下的roscpp_serialization中,見下圖。這個功能涉及的代碼
2023-09-14 17:26:28557 獲取SDK
SDK 使用 Repo 工具管理,拉取 SDK 需要配置安裝 Repo 工具。
Repo is a tool built on top of Git. Repo helps
2023-09-11 09:51:39
(libraries)和約定(conventions)的集合,旨在簡化在各種機器人平臺上創建復雜而健壯的機器人行為的任務。
ROS2 humble 是最新的 LTS 版本,官方發布在 Ubuntu 22.04 上,目前
2023-09-04 03:33:42
我將RTT studio升級到了2.2.7,SDK的版本是1.2.0,使能C++后編譯會報出以下錯誤:
在RTT studio的2.2.6中則沒有該問題,請幫忙解決下,謝謝。另外RTT studio的SDK中能否包含ROS或ROS2的功能?
2023-09-01 11:23:03
雙目立體視覺一直是機器視覺研究領域的發展熱點和難點,“熱”是因為雙目立體視覺有著及其廣闊的應用前景,且隨著光學、計算機科學等學科的不斷發展
2023-08-25 17:28:331273 
雙目更多的是基于物理測量,而單目視覺則是基于邏輯推理,通過大量的數據訓練,先識別出目標,再根據目標的大小和高度估算距離。因此,單目視覺的漏檢率高于雙目立體視覺,因為客觀上存在corner case。
2023-08-17 09:40:062165 
機器視覺也稱為計算機視覺,包括單目視覺、雙目(立體)視覺和多目視覺研究用計算機來模擬生物外部顯示器或宏觀視覺功能的科學和技術首要目標是用圖像創建或恢復現實視覺模型,然后認知現實世界。機器視覺
2023-08-14 09:51:35615 
機器視覺也稱為計算機視覺,包括單目視覺、雙目(立體)視覺和多目視覺研究用計算機來模擬生物外部顯示器或宏觀視覺功能的科學和技術首要目標是用圖像創建或恢復現實視覺模型,然后認知現實世界。
2023-08-11 09:34:00376 固件更新支持是PSA設備的基本屬性。然而,在不同的嵌入式平臺上更新設備固件的機制有很大的不同。這由于安全處理環境(SPE)的不同實現而進一步復雜化,安全處理環境(SPE)具有獨立于應用固件的其自己
2023-08-09 06:22:52
獲取SDK
SDK 使用 Repo 工具管理,拉取 SDK 需要配置安裝 Repo 工具。
Repo is a tool built on top of Git. Repo helps
2023-08-02 09:24:54
、圖像預處理和特征提取、立體匹配以及三維重建。為解決智能移動機器人、工業裝配機器人、家用機器人、公共服務機器人的視覺問題,雙目立體視覺技術的進一步研究可對多目視覺具有重要的啟發。 本文對雙目立體視覺測深
2023-07-19 14:18:240 本文對ToF、雙目視覺、結構光這三種技術展開分析,幫助你了解其各自的特點及應用
2023-07-10 16:04:16903 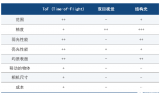
功耗低、性能好、聯網快——基于移芯EC618平臺的合宙低功耗4G-Cat.1系列模組,支持標準AT/LuatOS/C-SDK多樣化開發方式,可滿足用戶不同開發需求。其中C-SDK倉庫提供給客戶自己
2023-07-08 10:04:221077 
功耗低、性能好、聯網快——基于移芯EC618平臺的 合宙低功耗4G-Cat.1系列模組 ,支持標準AT/ LuatOS/ C-SDK多樣化開發方式,可滿足用戶不同開發需求。 其中 C-SDK倉庫
2023-07-07 12:05:02545 
matching)復雜,對計算資源消耗很大。那我們介紹下幾種經典的雙目匹配的算法。 【雙目匹配】 雙目立體視覺理論建立在對人類視覺系統研究的基礎上,通過雙目立體圖象的處理,獲取場景的三維信息,其結果表現為深度圖,再經過進一步處理就可得到三維空間中的景物,實現二維圖象到
2023-07-04 11:33:511524 
首先,課程介紹了雙目相機標定的基礎知識。我了解到雙目相機是由兩個相機組成的系統,通過同時拍攝目標物體的兩個視角來獲取三維信息。
2023-07-03 14:25:061915 
雙目立體視覺中常用的基于區域的局部匹配準則主要有圖像序列中對應像素差的絕對值之和SAD(sum of absolute differences)、對應像素差的平方之和SSD(sum of squared differences)及半全局匹配算法SGM(semi—global matching)。
2023-07-01 09:34:021117 
一、概述先楫半導體的hpm_sdk,對于習慣用keil的開發者可能不太習慣,但是從開發角度上看,是比較靈活的,可以給開發者一定的發揮空間。該sdk支持cmake構建,可以在多個支持cmake的平臺
2023-06-30 10:01:491777 
機器視覺檢測平臺 系統包含工業級智能機械手、機器視覺邊緣處理終端、機器視覺感知單元、機器視覺顯示單元、機器視覺場景應用資源包等部分組成,可模擬人工智能典型應用場景,實現人工智能應用技術教學落地。系統支持
2023-06-29 11:39:42440 6年磨劍造就INDEMIND硬實力
2023-06-28 10:33:29249 
SGBM(Semi-Global Block Matching)是一種用于計算雙目視覺中視差(disparity)的半全局匹配算法,在OpenCV中的實現為semi-global block matching(SGBM)。
2023-06-28 09:29:271290 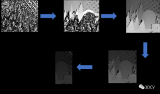
視差(Disparity):視差是指同一物體在兩個圖像中投影點之間的水平距離,它與物體到相機的距離成反比,因此可以用來估計物體的深度。視差圖(Disparity Map)是指存儲立體校正后單視圖所有像素視差值的二維圖像。
2023-06-19 10:14:14956 
“小眼睛半導體”出品的 Double_OV5640 雙目攝像頭模組使用;
注 2:注意攝像頭方向,插反或錯位可能會損壞攝像頭或開發板;
注 3:輸出視頻格式為 720P@30,有部分屏幕是不支持。
步驟
2023-06-13 16:01:09
電子發燒友網站提供《英特爾計算機視覺SDK WindowsTASS PVL網絡攝像頭安全系統.zip》資料免費下載
2023-06-13 15:43:070 雙目視覺傳感器有效彌補了數據驅動的 AI 算法在泛化性能上的短板,深度學習模型與視差點云技術的結合,極大擴張了視覺傳感器的工作邊界。
2023-06-07 14:16:32217 
雙目標定的方法有很多,常用的是基于棋盤格圖案的張氏標定法,它利用多幅不同角度拍攝的棋盤格圖像,通過提取角點坐標和求解最小二乘問題,得到兩個相機的內參矩陣和外參矩陣,進而計算出基礎矩陣。
2023-06-06 14:35:25658 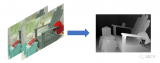
輸入數據來源可以是單目視覺相機、雙目視覺相機,數據可以是灰度圖或者彩色圖。
基于單目圖片的稱為單目車道線檢測技術,基于雙目圖片的稱為雙目車道線檢測技術。
2023-06-01 14:18:320 近些年迅猛發展的3D視覺技術已成為AGV領域的關鍵技術之一,進一步提升AGV智能化水平的同時,也實現了更高效、準確和安全的物流操作。在戶外環境中,用于AGV托盤或貨物識別最常見的兩種3D視覺技術分別是主動雙目視覺技術和ToF(Time-of-Flight)感知技術
2023-05-31 15:52:52886 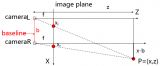
我需要 S32K312 SDK,但看到只有實時驅動程序支持。
我需要知道如何獲得基本的 SDK。你有什么建議或重定向嗎?
2023-05-30 14:06:18
Ros小車多功能QT上位機 代碼倉庫: 小車嵌入式控制可以查看我的博客: 小車通訊協議可以參
2023-05-29 15:00:341 SDK更新為V1.1.0無法編譯,提示找不到board.c
把文件夾從hpm_sdk-main改為hpm_sdk后依然無法編譯,請問這種情況如何解決
2023-05-26 06:19:04
我們已經通過 I2C 將 SE051C2 安全芯片連接到 MK81,我們從 nxp 站點獲得了一些針對不同 MCU 的 SDK 示例。但是我們無法找到 MK81 支持的 SE05x 示例。
我們需要
2023-05-22 07:07:41
ROS是機器人操作系統(Robot Operating System)的英文縮寫。ROS是用于編寫機器人軟件程序的一種具有高度靈活性的軟件架構。ROS的原型源自斯坦福大學的STanford
2023-05-19 17:45:072797 
ROS的通信架構是ROS的靈魂所在,它包括數據處理,進程運行,消息傳遞等** 。這篇文章主要介紹ROS1的通信架構的基礎通信方式和相關概念,因為ROS1和ROS2的通信方式相差很大,文章后面會介紹ROS2 的通信框架和差異。
2023-05-19 17:23:062693 
ROS的概念分為三個層次:文件系統層、計算圖層、社區層,這些層次以及概念將會在接下來的章節介紹。
除了這三個層次的概念,ROS同樣定義兩個names類型,包資源名稱和圖形資源名稱。
2023-05-19 17:11:591119 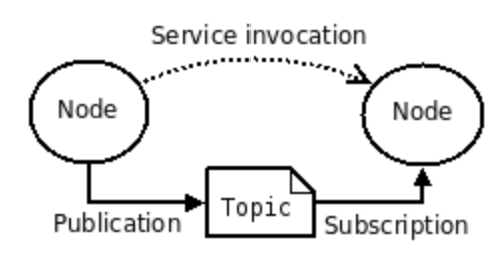
近來找到的實習主要是做智能車控制,用到的也就是ROS機器人操作系統,ROS需要運行在一個操作系統上,這個操作系統常用的就是Linux,而公司用的就是Ubuntu,所以Ubuntu-ROS組合就是實習的主要學習內容了。所以我就新開了一個坑,網絡上ROS的資源很豐富,我在此只是用以分享學習筆記。
2023-05-19 17:07:413736 
的micro-ROS解決方案 。micro-ROS是一個使用ROS 2的機器人控制系統的開源項目,ROS 2是第二代ROS(機器人操作系統),用于微控制器上的各種機器人系統。 在本篇文章中,您將了解用于微型ROS實現工業機器手的最佳硬件和軟件平臺,這些平臺可以使用
2023-05-18 23:15:02504 RK3568 :已具備產品化的完成OpenHarmony移植適配的模組。
主要能力:
基于Rockchip RK3568平臺,集成雙核架構GPU以及高效能NPU,四核64位Cortex-A55
2023-05-16 14:56:42
剛剛為 JN5188 創建并下載了 SDK。當我創建一個項目并嘗試訪問外圍設備工具時,它顯示為已禁用并顯示“該工具不支持所選處理器”。處理器在配置硬件信息中顯示為 JN5188,核心為
2023-05-12 08:19:42
T507:已具體產品化的完成OpenHarmony移植適配的模組。
主要能力:
全志工業級T507芯片,該芯片集成四核CortexTM – A53 CPU、G31 MP2 GPU、多路視頻輸出接口
2023-05-11 16:34:42
你好。我正在為 SJA1110 SDK 使用 S32DS 3.4。
我在“可用的 S32DS 軟件站點”中添加 SDK .zip 文件,用于“首選項 -> S32 平臺的 S32
2023-05-10 07:17:58
芯片燒錄行業領導者-昂科技術近日發布最新的燒錄軟件更新及新增支持的芯片型號列表,其中昂科發布軟件更新支持Espressif樂鑫科技的低功耗藍牙模組ESP32-WROOM32E已經被昂科的通用燒錄平臺
2023-05-09 17:17:102151 
團隊去年與 Open Robotics 一起,在提供硬件加速器的計算平臺上加入了適應和類型協商以提高 ROS 的性能。他們還實現了用于 Isaac ROS 的適應和類型協商—— NITROS(NVIDIA Isaac Transport for ROS)。
2023-05-06 10:01:17323 
Blynk 最近推出了一個新的物聯網平臺,對 ESP8266 提供開箱即用的支持,具有許多很酷的功能,包括設備配置和管理、云中的數據托管、固件無線更新、用戶和組織管理、數據分析、各種自動化等等。
2023-04-28 06:15:54
雙目測距的原理就說到這里,為了避免大家看到大段純敘述性的文字頭暈,下面的行文將會以FAQ的形式圍繞著實現雙攝像頭測距過程中碰到的幾點疑惑展開。
2023-04-26 16:47:373393 
ESP8266 Software Development Kit(SDK)是樂鑫為開發者提供的物聯網應用開發平臺,包括基礎平臺以及上層應用開發示例,如智能燈、智能開關等。SDK 的基礎平臺按照是否基于操作系統可分為:non-OS 和 RTOS 兩種版本。
2023-04-25 15:12:101156 
一、實驗目的Double_OV5640 雙目攝像頭模組采集視頻,通過 HDMI 輸出到外部顯示器。二、實驗設計OV5640 寄存器配置FPGA 通過 I2C 接口配置 OV5640,在實驗例程中已將
2023-04-18 16:45:09
變化(PTP-wise)。是否有更新的應用說明討論 SDK 如何支持 PTP?我找到了 driver_examples\\enet\\txrx_ptp1588_transfer\\enet_txrx_ptp1588_transfer.c(以及其中的 readme.txt),但想知道是否還有其他我可以閱讀的內容?
2023-04-18 08:46:34
使用 MCUXpresso“托管”項目與導入“演示”項目時項目設置/組織不同。這讓我想知道演示是否是在不同的環境中創建的。但更重要的是,與通過 2.13.0 版本的 SDK 提供的文件相比,該演示似乎具有更新
2023-04-04 07:24:56
KIT EVAL SERDESUB-913ROS
2023-03-30 11:45:55
我無法安裝任何 SDK。我收到“無法加載 SDK 更新站點或未設置 SDK 更新站點”。防火墻已被禁用。我已經安裝了 v11.6.0。
2023-03-27 06:49:05
 電子發燒友App
電子發燒友App











 工商網監
工商網監
評論