") ROS2中自帶例程測試
ROS2中自帶例程測試
如果你是一個(gè)ROS2的開發(fā)者,可能對剛才我們使用的ROS2命令比較熟悉,這時(shí)你可能也會產(chǎn)生一個(gè)問題:我們之前也安裝了ROS2系統(tǒng),那ROS2的原生功能還可以正常運(yùn)行么?
我們再來試一試ROS2中自帶的一個(gè)例程。
和剛才一樣打開兩個(gè)終端,這里我們需要source一下ROS里的環(huán)境變量。
該環(huán)境變量我們剛才已經(jīng)設(shè)置了過軟連接,所以配置過程中它也會配置ROS2的功能包路徑。
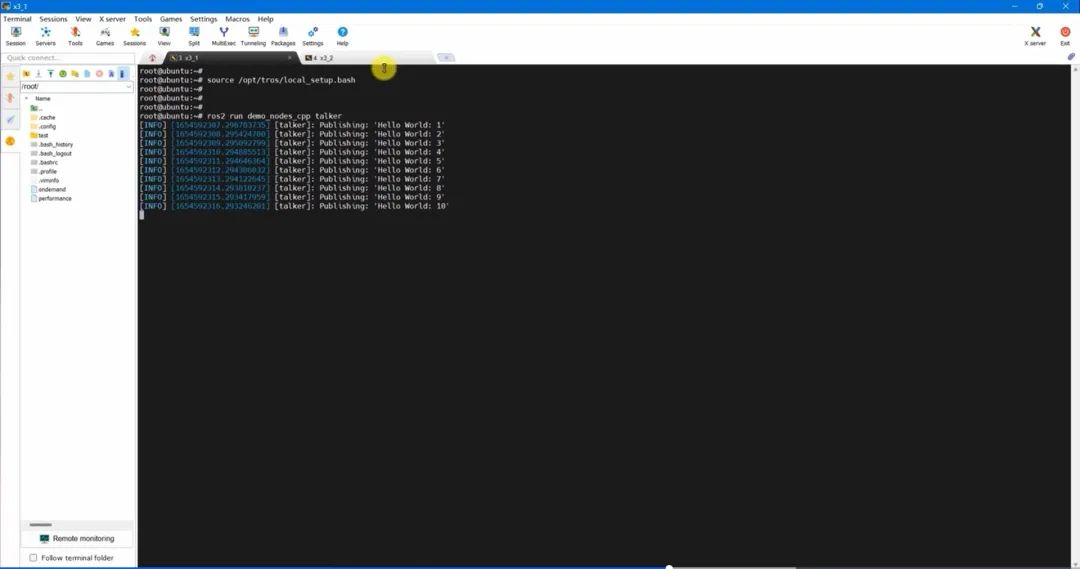
在終端1輸入命令:
$ source /opt/tros/local_setup.bash
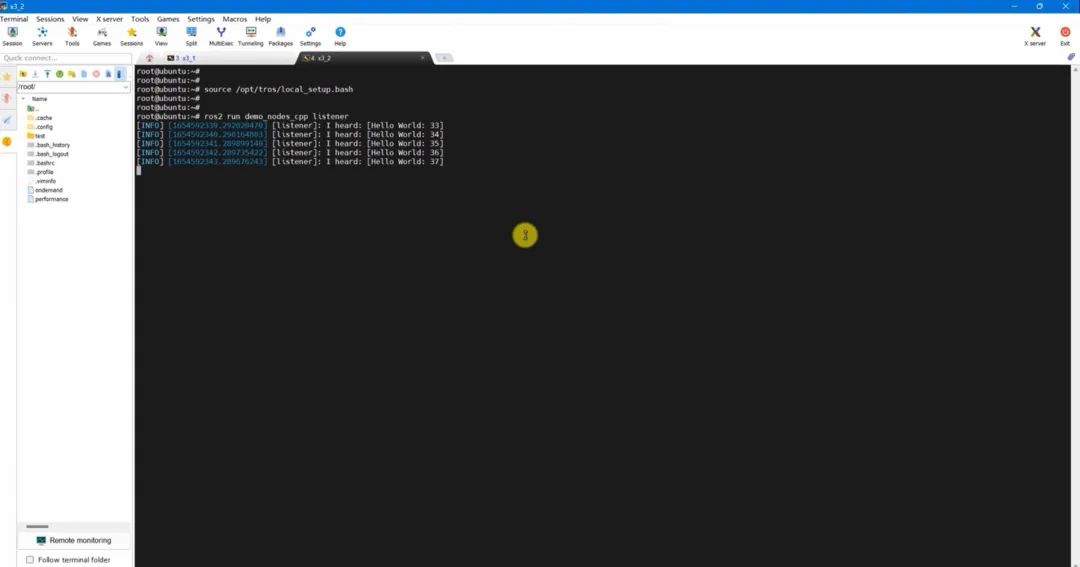
在終端2,也輸入同樣的命令,配置環(huán)境變量的腳本:

接下來運(yùn)行兩個(gè)ROS2的節(jié)點(diǎn)。
這兩個(gè)節(jié)點(diǎn)的功能包是屬于ROS2里的功能包,可以直接調(diào)用到。
我們來嘗試一下輸入命令ros2 run,再輸入功能包名稱,如果按Tab自動補(bǔ)全文件名,說明可以找到對應(yīng)的這個(gè)功能包:
ros2 run demo_nodes_cpp talker
talker也是一個(gè)發(fā)布者節(jié)點(diǎn)。按回車運(yùn)行,可以看到終端1的發(fā)布者節(jié)點(diǎn)以每秒1次的頻率發(fā)布消息。
同樣,我們到終端2中打開訂閱者節(jié)點(diǎn):
ros2 run demo_nodes_cpp listener
回車運(yùn)行,很快兩個(gè)終端間就建立了通訊。
這樣就使用ROS2里的例程實(shí)現(xiàn)了話題通信連接,只不過這里我們使用的就是ROS2原生的功能包了,而不是TogetherROS?·Bot的功能。
通信系統(tǒng)已經(jīng)沒問題了,但看上去似乎還不太直觀。
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28632瀏覽量
207972 -
程序
+關(guān)注
關(guān)注
117文章
3795瀏覽量
81293 -
ROS
+關(guān)注
關(guān)注
1文章
280瀏覽量
17054
發(fā)布評論請先 登錄
相關(guān)推薦
Micro-ROS:把ROS2放在MCU上
系統(tǒng)鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開發(fā)環(huán)境嗎?
如何在ROS2中運(yùn)行小烏龜呢
RT-Thread實(shí)時(shí)操作系統(tǒng)與ROS2是怎樣進(jìn)行通信的
基于無線wifi網(wǎng)絡(luò)的X3派和PC虛擬機(jī)通過ROS2實(shí)現(xiàn)跨設(shè)備通信
教你一步步創(chuàng)建自己的ROS2工作空間應(yīng)用
【昉·星光 2 高性能RISC-V單板計(jì)算機(jī)體驗(yàn)】四:在 VisionFive2 上安裝 ROS2 humble
【昉·星光 2 高性能RISC-V單板計(jì)算機(jī)體驗(yàn)】五:在 VisionFive2 上體驗(yàn) ROS2 humble
Linux嵌入式開發(fā)筆記(六)在ROS2中運(yùn)行小烏龜實(shí)例

ROS2中使用Gtes示例的詳細(xì)講解
Window10怎么安裝ROS2
了解ROS2是什么
DDS在ROS2中的應(yīng)用

在TogetherROS中如何安裝ROS2功能包






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論