高通、英特爾、英偉達(dá)、全志、聯(lián)芯、華為海思、三星都在積極推無(wú)人機(jī)方案,英特爾更熱衷于為無(wú)人機(jī)提供解決方案,尤其是表現(xiàn)在無(wú)人機(jī)視覺(jué)方面。相較起高通的雙目視覺(jué)技術(shù),規(guī)避了計(jì)算機(jī)視覺(jué)識(shí)別物體的大量計(jì)算,并有效提高了精度。
2016-09-09 09:40:05 2004
2004 相比于單目視覺(jué),雙目視覺(jué)(Stereo Vision)的關(guān)鍵區(qū)別在于可以利用雙攝像頭從不同角度對(duì)同一目標(biāo)成像,從而獲取視差信息,推算目標(biāo)距離。
2016-11-05 03:46:283097 未來(lái)十年,為了完成從感知+預(yù)警到?jīng)Q策+執(zhí)行的進(jìn)化之路,高級(jí)輔助駕駛系統(tǒng)(ADAS)將接入更多的傳感器,實(shí)現(xiàn)更為復(fù)雜的計(jì)算,同時(shí)具備更高的安全性。
2016-11-11 10:18:284743 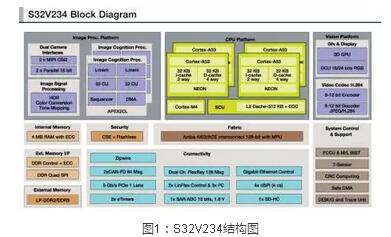
據(jù)麥姆斯咨詢(xún)報(bào)道,物聯(lián)網(wǎng)及雙目視覺(jué)專(zhuān)家鉅芯發(fā)布了一款智能雙目立體視覺(jué)系統(tǒng),以及業(yè)內(nèi)首顆智能雙目立體視覺(jué)芯片eagleye100。
2017-10-26 10:26:219961 本文提出了一種用于具有雙目視覺(jué)的自主機(jī)器人的三維語(yǔ)義場(chǎng)景感知的端到端流程。該流程包括實(shí)例分割、特征匹配和點(diǎn)集配準(zhǔn)。首先,利用RGB圖像進(jìn)行單視圖三維語(yǔ)義場(chǎng)景分割,將2D數(shù)據(jù)集中的常見(jiàn)對(duì)象類(lèi)封裝為物體實(shí)例的點(diǎn)云。
2024-02-21 15:55:38148 
`雙目立體視覺(jué)原理大揭秘(一)——雙目視覺(jué)導(dǎo)航、定位;雙目立體視覺(jué)是一門(mén)有著廣闊應(yīng)用前景的學(xué)科,根據(jù)雙目立體視覺(jué)CCAS提供的思路及組成原理,隨著光學(xué)、電子學(xué)以及計(jì)算機(jī)技術(shù)的發(fā)展,將不斷進(jìn)步,逐漸
2013-11-21 16:20:51
將成為工業(yè)檢測(cè)、生物醫(yī)學(xué)、虛擬現(xiàn)實(shí)等領(lǐng)域的關(guān)鍵技術(shù),還有可能應(yīng)用于航天遙測(cè)、軍事偵察等領(lǐng)域。目前在國(guó)外,雙目體視技術(shù)已廣泛應(yīng)用于生產(chǎn)、生 活中。雙目立體視覺(jué)是計(jì)算機(jī)視覺(jué)的一個(gè)重要分支,單從雙目視覺(jué)
2013-11-21 16:22:03
四種:1、雙目視覺(jué)導(dǎo)航、定位;2、三維重構(gòu);3、雙目立體測(cè)量;4、空間三維立體跟蹤。這些運(yùn)用需求,其實(shí)很多項(xiàng)目上都有用到,如工業(yè)流水線上物體外形檢測(cè)、表面缺陷等,如娛樂(lè)活動(dòng)中可以利用立體視覺(jué)構(gòu)造
2016-03-03 09:36:59
GHz 雷達(dá)系統(tǒng)參考設(shè)計(jì)五、世強(qiáng)高級(jí)汽車(chē)環(huán)視輔助駕駛系統(tǒng)(ADAS)方案……雙目視覺(jué)ADAS解決方案通過(guò)文檔,可了解以下內(nèi)容:一、雙目視覺(jué) ADAS 芯片-S32V234二、雙目視覺(jué) ADAS 的優(yōu)勢(shì)三、雙目視覺(jué)的測(cè)距步驟四、雙目視覺(jué) ADAS 的應(yīng)用五、雙目視覺(jué) ADSA 的解決方案六、總結(jié)
2020-06-02 15:09:59
` 本帖最后由 sszx2007 于 2020-3-2 17:04 編輯
LabVIEW雙目視覺(jué)原創(chuàng) 張冬斌 LabVIEW逆向工程高級(jí)編程 轉(zhuǎn)載至:https
2020-03-02 17:03:12
挑戰(zhàn),包括激光雷達(dá)、單目測(cè)距和雙目視覺(jué)技術(shù)等。在當(dāng)前的高級(jí)輔助駕駛技術(shù)(ADAS)中,雙目視覺(jué)技術(shù)在距離檢測(cè)方面表現(xiàn)出色,它可以精確地測(cè)量物體的距離,提供更客觀的數(shù)據(jù)。
為了應(yīng)對(duì)這一需求,設(shè)計(jì)了一種
2023-12-19 18:02:07
大佬們好我有一定的Labview基礎(chǔ),然而對(duì)Labview的雙目視覺(jué)測(cè)量所知甚少,現(xiàn)在有一個(gè)需求,就是在比較小的空間內(nèi)實(shí)現(xiàn)微米級(jí)的三維動(dòng)態(tài)測(cè)量,想知道通過(guò)Labview雙目視覺(jué)有實(shí)現(xiàn)的可能性嗎?希望大佬們多多指導(dǎo)。感激不盡!謝謝!
2020-07-21 21:50:21
和雙目視覺(jué)硬件等設(shè)計(jì)的試用。相信板子的廠家也非常樂(lè)于看到這個(gè)配套的硬件產(chǎn)生。3.整個(gè)項(xiàng)目涉及:雙目景深算法的開(kāi)發(fā),里面有包含了雙目攝像頭的畸變校準(zhǔn),極坐標(biāo)的特征匹配,景深圖像的去噪聲,生產(chǎn)景深圖像;硬件
2017-08-21 12:42:45
申請(qǐng)理由:之前用wrtnode的u***接雙攝像頭外加一個(gè)么mcu實(shí)現(xiàn)過(guò)一個(gè)一個(gè)雙目視覺(jué)隨動(dòng)平臺(tái),這樣太麻煩了,希望能用這個(gè)來(lái)實(shí)現(xiàn)一個(gè)更簡(jiǎn)單的解決方案。項(xiàng)目描述:u***接雙攝像頭,mcu控制云臺(tái)。通過(guò)WIFI將雙目視覺(jué)傳遞到手機(jī)進(jìn)行顯示,同時(shí)將手機(jī)的角度信息返回,控制云臺(tái)轉(zhuǎn)動(dòng)。
2015-09-10 11:25:10
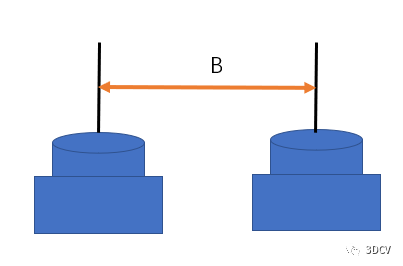
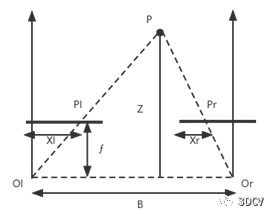
雙目視覺(jué)的原理:由于視差原理,左右兩個(gè)ccd的位置固定,若能測(cè)量空間中同一個(gè)點(diǎn)P在左右兩個(gè)ccd中圖像的位置,則根據(jù)三角原理,可以求得P點(diǎn)在空間中的坐標(biāo)位置。可用于攝像頭實(shí)現(xiàn)空間點(diǎn)的距離測(cè)量。下圖
2021-09-27 16:52:18
。機(jī)器人由電力驅(qū)動(dòng),通過(guò)液壓組件控制行動(dòng)。機(jī)器人的體內(nèi)和腿上安裝了可以使其保持平衡的傳感器,并在頭部安裝了光學(xué)雷達(dá)和雙目視覺(jué)傳感器,可以幫助機(jī)器人躲避障礙、判斷地貌、進(jìn)行導(dǎo)航。該版本Atlas高約
2016-02-25 10:16:20
我自己了解ARM不是很多,想問(wèn)一下大家,最近想做一個(gè)基于雙目視覺(jué)的避障自主導(dǎo)航無(wú)人車(chē),我想在ARM上面搭載GPS模塊,實(shí)現(xiàn)無(wú)人車(chē)自動(dòng)導(dǎo)航功能,另一方面我還想利用車(chē)載PC的OpenCV在處理完雙目
2017-03-18 13:19:01
雙目視覺(jué)智能平臺(tái)概述硬件資源1 FMC 雙目MIPI模塊FL0214FL0214模塊的參數(shù)說(shuō)明 FL0214模塊的結(jié)構(gòu)圖FL0214模塊原理框圖模塊FMC LPC的引腳分配
2021-01-01 06:18:17
`相比于單目視覺(jué),雙目視覺(jué)(Stereo Vision)的關(guān)鍵區(qū)別在于可以利用雙攝像頭從不同角度對(duì)同一目標(biāo)成像,從而獲取視差信息,推算目標(biāo)距離。恩智浦視覺(jué)ADAS專(zhuān)用SoC: S32V234未來(lái)十年
2017-08-12 15:15:52
利用LABVIEW視覺(jué)模塊完成攝像機(jī)標(biāo)定,一般需要哪些vi?相關(guān)參數(shù)怎么設(shè)置?
2015-05-17 17:24:58
和空間位置的精度要求往往比較高。計(jì)算機(jī)視覺(jué)是利用從不同的觀察點(diǎn)獲取的圖像來(lái)重建三維[1]場(chǎng)景描述的技術(shù)。同時(shí)被動(dòng)視覺(jué)的大部分研究都集中于雙目視覺(jué),即兩個(gè)攝像機(jī)從兩個(gè)不同的觀察點(diǎn)獲得同一場(chǎng)景的兩幅圖全文下載
2010-04-24 09:25:13
(Odometry)視覺(jué)里程計(jì)(Visual Odometry)單目視覺(jué)里程計(jì)(monocular Visual Odometry)雙目視覺(jué)里程計(jì)(stereo Visual Odometry)視覺(jué)慣性里程計(jì)(visual-inertial Odometry)輪式里程計(jì)odometry 編碼器 編碼輪encoder多傳...
2021-07-27 07:21:50
文件BOOT.bin.pdf》制作包含.bit文件的BOOT.bin文件,將其拷貝到TF卡中,插入Zstar開(kāi)發(fā)板的卡槽中,做好裝配連接,上電。視頻顯示如圖所示。圖 雙目視頻采集效果`
2019-12-10 15:29:46
雙目注視下雙臂機(jī)器人裝配時(shí),雙目測(cè)量分辨率最高的位置往往并不對(duì)應(yīng)機(jī)器人 的最佳操作性,為求得機(jī)器人的最佳裝配位置本文把問(wèn)題歸結(jié)為對(duì)一個(gè)所構(gòu)造的目標(biāo)函數(shù)求值,并通
2009-07-08 14:10:42 21
21 根據(jù)雙目視覺(jué)傳感器的工作原理, 分析了影響測(cè)量精度的因素, 表明雙目視覺(jué)傳感器的物體空間坐標(biāo)與圖像坐標(biāo)之間存在復(fù)雜的非線性映射關(guān)系, 其數(shù)學(xué)模型無(wú)法用解析式精確地加以
2009-07-10 15:53:1111 對(duì)于基于圖像的具有手眼或固定攝像機(jī)模式的雙目視覺(jué)伺服控制系統(tǒng),考慮機(jī)器人的運(yùn)動(dòng)學(xué)特性,在攝像機(jī)的內(nèi)外參數(shù)部分未知的情況下,給出了一種直接自適應(yīng)控制器實(shí)現(xiàn)定位
2010-01-11 15:57:3118 本文主要從控制角度出發(fā),針對(duì)手眼機(jī)器人雙目視覺(jué)伺服控制問(wèn)題,利用變結(jié)構(gòu)控制理論設(shè)計(jì)了視覺(jué)伺服控制器,同時(shí)用自適應(yīng)估計(jì)的方法對(duì)深度進(jìn)行估計(jì),基于圖像誤差實(shí)現(xiàn)了定
2010-01-13 14:43:2719 文章介紹了一種以TMS320DM642 為核心,結(jié)合編解碼芯片SAA7115 和SAA7105 組成的高速圖像處理系統(tǒng),和典型的電機(jī)控制芯片TMS320F2812 為核心的電機(jī)控制系統(tǒng),組成了基于雙目視覺(jué)的跟蹤機(jī)
2010-01-18 15:28:3828 提出一種新的三維坐標(biāo)測(cè)量方法,該方法基于雙目視覺(jué)、雙頻光柵投影、相移和三角測(cè)量等測(cè)量方法。測(cè)量系統(tǒng)采用兩個(gè)攝像機(jī)記錄投影光柵,通過(guò)分析雙頻投影條紋不同柵距的
2010-01-22 12:10:3820 雙日視覺(jué)是計(jì)算機(jī)視覺(jué)領(lǐng)域的一個(gè)重要組成部分。雙目視覺(jué)研究中的關(guān)鍵技術(shù)攝像機(jī)標(biāo)定和立體匹配一直是研究的熱點(diǎn)。本文由兩部分組成,分別對(duì)雙目視覺(jué)的算法和未標(biāo)定圖
2010-08-14 16:41:540 一種基于圖像分割和立體視覺(jué)相結(jié)合的障礙物檢測(cè)方法。通過(guò)分割提取出了障礙物的大致形體并濾去地面上的冗余信息,這樣就把立體視覺(jué)避障中匹配區(qū)域縮小到有用的障礙物區(qū)
2010-10-18 16:08:0827 視覺(jué)傳感器的標(biāo)定技術(shù)
雙目視覺(jué)傳感器由兩臺(tái)性能相同的面陣CCD攝像機(jī)組成,基于立體視差的原理,可完
2009-11-07 11:42:011723 本內(nèi)容基于ADSP-BF548處理器設(shè)計(jì)實(shí)現(xiàn)了具有結(jié)構(gòu)光雙目視覺(jué)的四足可變形仿生機(jī)器人系統(tǒng)
2011-08-31 17:42:15144 根據(jù)雙目立體視覺(jué)傳感器三角立體視差模型,建立了結(jié)構(gòu)參數(shù)誤差的傳遞函數(shù),分析了雙目視覺(jué)傳感器結(jié)構(gòu)參數(shù)及其誤差傳遞規(guī)律對(duì)傳感器綜合測(cè)量精度的影響,得出了結(jié)構(gòu)參數(shù)的合理
2011-09-06 14:38:4075 本文以遺視投影變換為依據(jù),針對(duì)多視覺(jué)傳感器檢測(cè)系統(tǒng)中的雙目視覺(jué)傳感器,建立了雙目視覺(jué)傳感器測(cè)量空間三維坐標(biāo)的模型.事先確定攝像機(jī)的部分不易變化的參數(shù),其它參數(shù)在攝
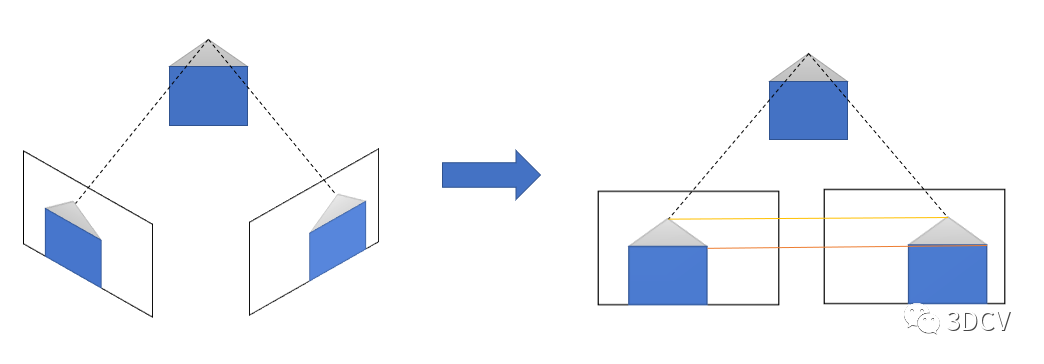
2012-03-02 16:02:1315 雙目視覺(jué)是利用機(jī)器視覺(jué)進(jìn)行障礙物檢測(cè)的研究熱點(diǎn)。針對(duì)雙目視頻不同步,導(dǎo)致立體匹配不精準(zhǔn)的問(wèn)題,提出了一種基于圖像處理的雙目校準(zhǔn)算法。算法首先根據(jù)道路的先驗(yàn)特征模型,建立視覺(jué)校準(zhǔn)的敏感區(qū)域,以減小
2015-12-18 16:26:5734 電子開(kāi)發(fā)機(jī)器人相關(guān)教程資料——全自主機(jī)器人雙目視覺(jué)運(yùn)動(dòng)檢測(cè)
2016-09-06 16:42:430 全自主機(jī)器人垂直異構(gòu)雙目視覺(jué)研究,感興趣的小伙伴們可以瞧一瞧。
2016-09-18 17:15:050 APEX2CL 的視覺(jué)加速引擎。每個(gè) APEX2CL 擁有 64 個(gè)
本地計(jì)算單元(CU),并配有本地內(nèi)存和專(zhuān)用 DMA,通過(guò) SIMD/MIMD(單指令多數(shù)據(jù)/多指令多
2016-12-30 14:55:3725 基于雙目視覺(jué)伺服反饋的非完整移動(dòng)機(jī)器人軌跡跟蹤_王寶磊
2017-03-16 09:17:261 問(wèn)題,、提出一種基于雙目視覺(jué)的投影儀標(biāo)定算法,將投影儀視為逆向相機(jī),利用一個(gè)輔助相機(jī)捕獲投影于不同位置標(biāo)定平面,確立攝像機(jī)圖像與標(biāo)定平面之間的對(duì)應(yīng)關(guān)系,然后利用極線原理得到攝像機(jī)圖像與投影儀圖像之間的對(duì)應(yīng)關(guān)
2017-11-06 15:30:2120 針對(duì)國(guó)內(nèi)現(xiàn)有電子導(dǎo)盲系統(tǒng)存在掃面范圍小的缺點(diǎn),提出一種新型導(dǎo)盲設(shè)計(jì)方法。該系統(tǒng)以雙目視覺(jué)測(cè)距技術(shù)為基礎(chǔ),通過(guò)語(yǔ)音轉(zhuǎn)換模塊能夠準(zhǔn)確地提示前方障礙物情況。本文對(duì)該設(shè)計(jì)的測(cè)距基本原理及關(guān)鍵技術(shù)作了一定闡述,并給出了可行的軟、硬件設(shè)計(jì)方法。
2017-11-22 15:25:002133 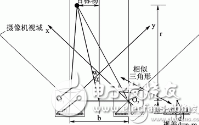
雙目立體測(cè)量的特點(diǎn)類(lèi)似于“雙目導(dǎo)航、定位”,一般來(lái)說(shuō):第一、需要提取的點(diǎn)不多,僅把被測(cè)物需要測(cè)量部分的點(diǎn)找到即可;第二、速度要求較高,一般要求一秒中測(cè)量多個(gè)產(chǎn)品;第三、對(duì)光照環(huán)境要求高。因?yàn)闇y(cè)量的時(shí)候相機(jī)和被測(cè)物必然有相對(duì)位移,所以拍攝到的圖像可能各個(gè)角度都會(huì)有。
2018-01-23 11:32:5322024 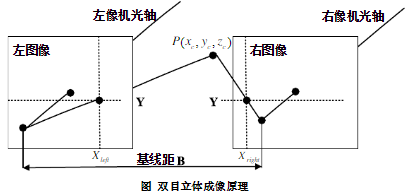
雙目視覺(jué)導(dǎo)航敏感器BVS逐漸成為各國(guó)航天最新領(lǐng)域的研制熱點(diǎn)。雙目立體視覺(jué)是由不同位置的兩臺(tái)或者一臺(tái)攝像機(jī)經(jīng)過(guò)移動(dòng)或旋轉(zhuǎn)拍攝同一幅場(chǎng)景,通過(guò)各種算法匹配出相應(yīng)像點(diǎn),從而計(jì)算出視差,然后基于三角測(cè)量
2018-01-25 14:00:160 雙目立體視覺(jué)是機(jī)器視覺(jué)的一種重要形式,它是基于視差原理并由多幅圖像獲取物體三維幾何信息的方法。雙目立體視覺(jué)系統(tǒng)一般由雙攝像機(jī)從不同角度同時(shí)獲得被測(cè)物的兩幅數(shù)字圖像,或由單攝像機(jī)在不同時(shí)刻從不同角度
2018-02-08 14:46:2449072 Binocular Recognition雙目識(shí)別:基于利用仿生學(xué)模擬人眼視覺(jué),雙目視覺(jué)基于視差原理對(duì)圖像進(jìn)行重構(gòu),利用bdc人臉識(shí)別算法進(jìn)行識(shí)別。實(shí)踐證明通過(guò)融合雙目視覺(jué)(Binocular vision)實(shí)現(xiàn)是獲取更好的立體信息,從而在識(shí)別時(shí)更具高效。
2018-03-19 08:48:449988 目前市面上的深度視覺(jué)產(chǎn)品主要是深度攝像頭。按技術(shù)分類(lèi),深度攝像頭可分為以下三類(lèi)主流技術(shù):結(jié)構(gòu)光、雙目視覺(jué)和TOF飛行時(shí)間法。前兩者受環(huán)境影響較大,后者成本高量產(chǎn)難還不夠清晰。
2018-04-10 09:56:156457 紅外或激光測(cè)距是目前應(yīng)用最為廣泛的無(wú)人機(jī)探測(cè)技術(shù),但是由于它是通過(guò)信號(hào)來(lái)計(jì)算的,因此很容易受到外界因素的干擾,用于自動(dòng)避障的功能并不是很合適。而雙目視覺(jué)技術(shù)則不會(huì)受到太大的外界干擾,因此雖然該技術(shù)的難度較高,但是已經(jīng)開(kāi)始逐漸被應(yīng)用到無(wú)人機(jī)避障技術(shù)中來(lái)。
2018-05-29 09:01:004685 視覺(jué)的優(yōu)勢(shì)在于它更致密,而不是精度更高,測(cè)的更遠(yuǎn),視覺(jué)是聚焦在中近距離,雷達(dá)是聚焦在中遠(yuǎn)距離。
2018-08-06 11:28:1315217 現(xiàn)在,AI越來(lái)越融入我們的生活之中,而AI時(shí)代下,移動(dòng)感知已經(jīng)漸漸成為了整個(gè)行業(yè)的共性。不論是無(wú)人設(shè)備還是機(jī)器人,它們都需要進(jìn)行移動(dòng),因此,移動(dòng)感知已經(jīng)成為了新的需求。
2018-09-20 14:44:023829 在得到初始視差圖后,需要進(jìn)一步判別障礙物的遠(yuǎn)近及大小,所以這里引入 V-視差和 U-視差理論 [7] 。 V-視差圖是在初始視差圖的基礎(chǔ)上,累加視差圖像每一行上具有相同視差值 dv 的像素個(gè)數(shù),以像素的個(gè)數(shù)作為像素坐標(biāo)(dv,y)的灰度值,為 0 到 255。 V-視差圖的高度與原圖像是相同的,但是寬度只有 256 [8] 。 同理,U-視差圖是累加視差圖像每一列上具有相同視差值 du 的像素個(gè)數(shù),高度為 256。
2018-11-29 16:27:4811512 
基于內(nèi)窺鏡視覺(jué)導(dǎo)航的盆腔微創(chuàng)手術(shù),往往因?yàn)椴≡畹膹?fù)雜解剖位置以及內(nèi)窺鏡視野的局限性,對(duì)手術(shù)的順利開(kāi)展提出了重要的挑戰(zhàn)。針對(duì)這個(gè)問(wèn)題,設(shè)計(jì)并開(kāi)發(fā)一套基于立體視覺(jué)的盆腔微創(chuàng)手術(shù)的增強(qiáng)現(xiàn)實(shí)( AR)導(dǎo)航仿真系統(tǒng)。
2018-12-29 16:50:406 的逐步成熟,人機(jī)協(xié)作的不斷深入發(fā)展,機(jī)器人產(chǎn)品應(yīng)用不斷擴(kuò)展,全球機(jī)器人將迎來(lái)新一輪的增長(zhǎng)。 自創(chuàng)立之初,INDEMIND便一直致力于計(jì)算機(jī)視覺(jué)技術(shù)的研發(fā)與應(yīng)用創(chuàng)新,旗下自研的雙目視覺(jué)慣性模組及高精度Vi-SLAM算法已應(yīng)用于掃地機(jī)器人、服務(wù)機(jī)器人、穿戴計(jì)
2020-03-21 15:33:541033 自動(dòng)駕駛、動(dòng)作捕捉等場(chǎng)景非常依賴(lài)雙目立體相機(jī)采集圖像、位姿信息的清晰度、豐富度,單位時(shí)間內(nèi)雙目相機(jī)提供的信息越多,越有利于相關(guān)場(chǎng)景的算法追蹤及定位,降低算法開(kāi)發(fā)難度。
2019-04-11 18:21:132941 視覺(jué)技術(shù)升級(jí)進(jìn)步。丨深耕不輟,實(shí)現(xiàn)業(yè)內(nèi)首款200幀雙目慣性相機(jī)面對(duì)日益提升的使用需求,為提升產(chǎn)品適用性,INDEMIND深耕不輟,為旗下雙目視覺(jué)慣性模組提供了200幀高速環(huán)境獲取能力,滿(mǎn)足了不同場(chǎng)景
2019-04-28 18:33:111894 傳統(tǒng)的測(cè)量設(shè)備如三坐標(biāo)測(cè)量機(jī)、卡尺、千分尺等, 因測(cè)量速度慢、效率低,已不能適應(yīng)現(xiàn)代制造技術(shù)發(fā)展的需要。
2019-05-29 13:49:1813039 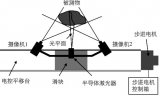
解算應(yīng)用在單目傳感器上無(wú)法得到有力支持,影響搭載單目視覺(jué)導(dǎo)航系統(tǒng)掃地機(jī)的智能避障,語(yǔ)義地圖等功能。另一方面,單目SLAM更易受到運(yùn)動(dòng)過(guò)程中的噪聲影響,穩(wěn)定性較雙目SLAM低,對(duì)復(fù)雜環(huán)境的適應(yīng)能力較弱
2019-07-15 19:00:301754 隨著社會(huì)經(jīng)濟(jì)發(fā)展水平和人們消費(fèi)觀念的轉(zhuǎn)變,更具科技屬性的智能規(guī)劃型掃地機(jī)器人成為最受費(fèi)者青睞的智能家居產(chǎn)品。據(jù)數(shù)據(jù)顯示,智能規(guī)劃掃地機(jī)器人市場(chǎng)占比從17年的10%提升到18年的59%,其中激光導(dǎo)航占76%,視覺(jué)導(dǎo)航系統(tǒng)占24%。
2019-07-05 09:51:395607 在雙目相機(jī)領(lǐng)域是非常煎熬和糾結(jié)的,煎熬來(lái)自哪里呢?
2019-07-11 16:39:195748 激光技術(shù)雖然也能實(shí)現(xiàn)類(lèi)似雙目視覺(jué)的功能,但是受限于技術(shù)發(fā)展,目前的激光元件普遍價(jià)格貴、體積大、功耗高,應(yīng)用在消費(fèi)級(jí)無(wú)人機(jī)上既不經(jīng)濟(jì)也不實(shí)用。
2019-08-01 09:59:371809 另外,如果拍攝的物體缺乏紋理和細(xì)節(jié)(比如拍攝一張白紙)的話,也很難進(jìn)行特征匹配。這些都對(duì)算法的魯棒性提出了很大的挑戰(zhàn)。
2019-08-23 15:17:437449 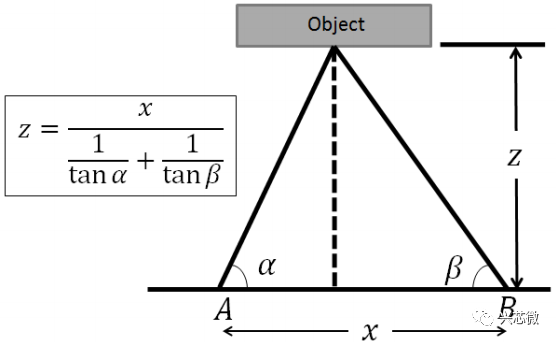
提出了一種移動(dòng)機(jī)器人路徑規(guī)劃和避障的系統(tǒng)設(shè)計(jì)方案,實(shí)現(xiàn)了移動(dòng)機(jī)器人自主行進(jìn)的路徑規(guī)劃和自動(dòng)避障功能.詳細(xì)說(shuō)明了如何采用立體視覺(jué)實(shí)現(xiàn)對(duì)環(huán)境的探測(cè),利用圖像處理算法的組合分離出地面、背景、障礙物和目標(biāo)
2019-08-29 17:03:003 由于雙目視覺(jué)監(jiān)控系統(tǒng)可以模仿人眼功能,感知三維世界信息,能夠得到被測(cè)對(duì)象到CCD攝像機(jī)的深度信息,近幾年已開(kāi)始在需要三維立體檢測(cè)的領(lǐng)域得到應(yīng)用。另外,雙目視覺(jué)監(jiān)控系統(tǒng)也可用于多場(chǎng)景監(jiān)控,大大擴(kuò)展
2020-05-07 09:55:59966 如今,經(jīng)濟(jì)水平不斷發(fā)展,人們的生活水平也不斷提升,越來(lái)越多的消費(fèi)者開(kāi)始注重生活品質(zhì)。自帶新奇、懶人助手等標(biāo)簽的掃地機(jī)器人一進(jìn)入大眾視野,便被廣大消費(fèi)者所接受,儼然已經(jīng)成為一類(lèi)新興小家電。 但隨著掃地機(jī)器人技術(shù)不斷升級(jí),導(dǎo)航技術(shù)不斷成熟,行業(yè)進(jìn)入同質(zhì)化時(shí)代,產(chǎn)品之間的差異化越來(lái)越小。要在競(jìng)爭(zhēng)中破局,就需要源源不斷的新技術(shù)加持,打造出更有差異化的產(chǎn)品,直擊用戶(hù)痛點(diǎn),才會(huì)吸引消費(fèi)者。 目前,市面上主流的掃地
2020-11-12 14:24:053594 如今,人們的生活水平越來(lái)越高,越來(lái)越多的消費(fèi)者開(kāi)始注重生活品質(zhì),很多的家庭為了省時(shí)省力都會(huì)購(gòu)入一臺(tái)智能掃地機(jī)器人。但是當(dāng)很多消費(fèi)者購(gòu)買(mǎi)了掃地機(jī)回家使用后發(fā)現(xiàn),咦,怎么那么蠢,說(shuō)好的智能呢???這個(gè)智障掃地機(jī)器人! 花錢(qián)來(lái)買(mǎi)掃地機(jī),本打算提升自己的生活品質(zhì),自己好偷一偷懶的。沒(méi)想到它卻成了生活扼住自己喉嚨加以拳打腳踢的幫兇,只好暗嘆自己究竟造了什么孽,買(mǎi)了這么個(gè)智障(魚(yú)哭了水知道,你哭了誰(shuí)知道)。 其實(shí)
2020-11-12 14:26:041023 Airdoc莫納什研究中心在近期舉辦的KITTI Vision Benchmark中雙目立體匹配競(jìng)賽中,過(guò)關(guān)斬將,獲得雙目視覺(jué)匹配世界冠軍。獲獎(jiǎng)算法第一作者程雪蓮,師從Airdoc莫納什研究中心首席科學(xué)家戈宗元博士。
2020-08-19 16:50:20861 1.1. 雙目視覺(jué)簡(jiǎn)介 雙目視覺(jué)廣泛應(yīng)用在機(jī)器人導(dǎo)航,精密工業(yè)測(cè)量、物體識(shí)別、虛擬現(xiàn)實(shí)、場(chǎng)景重建,勘測(cè)領(lǐng)域。 什么是雙目視覺(jué)? 雙目視覺(jué)是模擬人類(lèi)視覺(jué)原理,使用計(jì)算機(jī)被動(dòng)感知距離的方法。從兩個(gè)或者
2020-10-23 09:51:5710867 
先說(shuō)一下單/雙目的測(cè)距原理區(qū)別: 單目測(cè)距原理: 先通過(guò)圖像匹配進(jìn)行目標(biāo)識(shí)別(各種車(chē)型、行人、物體等),再通過(guò)目標(biāo)在圖像中的大小去估算目標(biāo)距離。這就要求在估算距離之前首先對(duì)目標(biāo)進(jìn)行準(zhǔn)確識(shí)別,是汽車(chē)
2020-11-05 10:07:394876 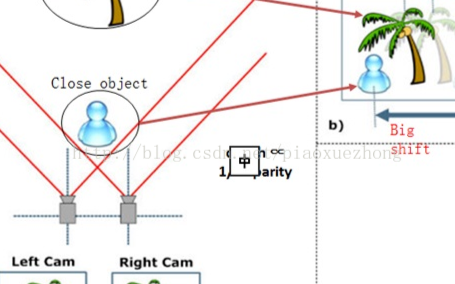
不僅要在靠近柜腳床腳時(shí)減速,還要在“看見(jiàn)”障礙物(掉在地上的襪子、纏繞的數(shù)據(jù)線)時(shí)來(lái)個(gè)急剎車(chē)。
2020-11-12 17:40:201859 機(jī)器人想要通過(guò)若干幅圖像來(lái)獲取目標(biāo)的三維坐標(biāo),雙目視覺(jué)技術(shù)中更為重要的工作是對(duì)圖像執(zhí)行匹配,首先明確物體在左右圖像的相互匹配的點(diǎn),然后獲得每一點(diǎn)視差以及深度信息。
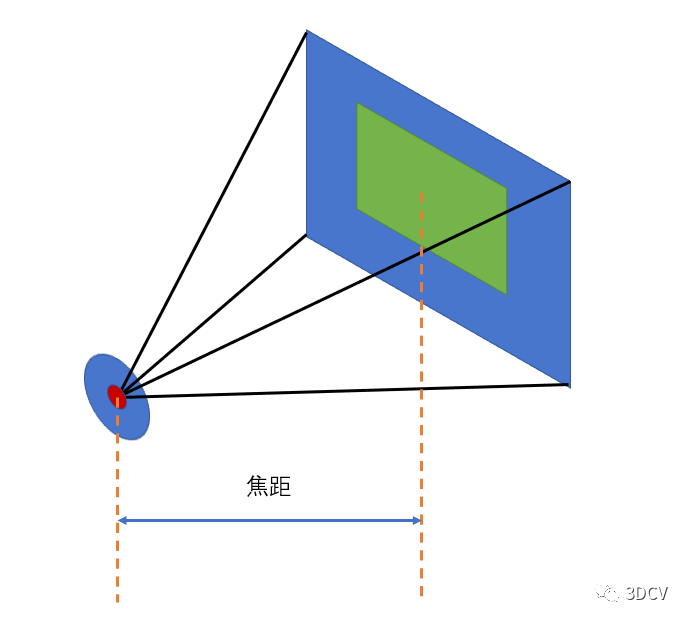
2021-03-04 09:50:211679 文章導(dǎo)讀 本文通過(guò)介紹雙目立體視覺(jué)的成像過(guò)程,帶大家了解雙目視覺(jué)如何從兩個(gè)不同視角的成像平面中恢復(fù)出物體三維幾何信息,重建周?chē)拔锏娜S形狀與位置。 在說(shuō)雙目視覺(jué)之前,我們先聊一下單目成像過(guò)程
2021-04-26 13:36:393497 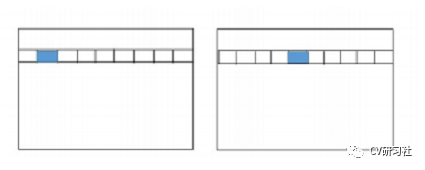
雙目視覺(jué)技術(shù)的原理、結(jié)構(gòu)、特點(diǎn)、發(fā)展現(xiàn)狀和發(fā)展方向分析 雙目立體視覺(jué)是機(jī)器視覺(jué)的一種重要形式,它是基于視差原理并由多幅圖像獲取物體三維幾何信息的方法。 雙目立體視覺(jué)系統(tǒng)一般由雙攝像機(jī)從不同角度同時(shí)
2021-06-01 16:36:562223 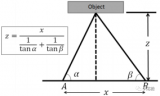
機(jī)器視覺(jué)可代替人眼對(duì)物體進(jìn)行檢測(cè)和識(shí)別,較為常見(jiàn)的是利用單目攝像頭。若要獲取物體的深度信息,僅憑單目攝像頭是不完善的,通常情況下需選擇雙目攝像頭來(lái)獲取物體三維信息。
2022-04-07 09:42:442123 針對(duì)熱軋寬厚板產(chǎn)線現(xiàn)場(chǎng)存在大量冷卻水導(dǎo)致的水汽、輥道上方照明不均并存在反光、鋼板表面隨機(jī)分布除鱗殘?jiān)头蹓m、鋼板運(yùn)動(dòng)過(guò)程中震動(dòng)打滑等惡劣工況,基于人眼雙目視覺(jué)理論提出了多陣列相機(jī)組圖像采集機(jī)制,研究出高斯噪聲、椒鹽噪聲、脈沖噪聲等多類(lèi)型混雜噪聲高效濾除算法
2022-07-05 11:46:061361 摘要:針對(duì)基于雙目深度圖的室外大規(guī)模地圖構(gòu)建計(jì)算冗長(zhǎng),而在無(wú)人系統(tǒng)的有限算力下,計(jì)算效率需求顯著的情況,文中提出一種基于雙目視覺(jué)立體匹配的三維地圖構(gòu)建方法。首先針對(duì)由立體匹配算法及原圖引入的噪聲誤差
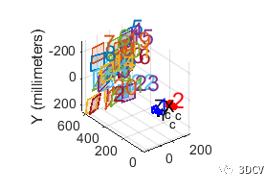
2022-08-10 11:38:122020 雙目標(biāo)定和普通相機(jī)的標(biāo)定一樣,其標(biāo)定時(shí)不僅標(biāo)定出兩個(gè)相機(jī)的內(nèi)參,還要標(biāo)定出兩個(gè)相機(jī)之間的關(guān)系。因此,在進(jìn)行雙目標(biāo)定時(shí),需要使兩個(gè)相機(jī)對(duì)同一標(biāo)定板進(jìn)行多次取圖,分別標(biāo)定出各自的內(nèi)參和相對(duì)于標(biāo)定板的外參,然后便可計(jì)算出兩相機(jī)位置間的關(guān)系:
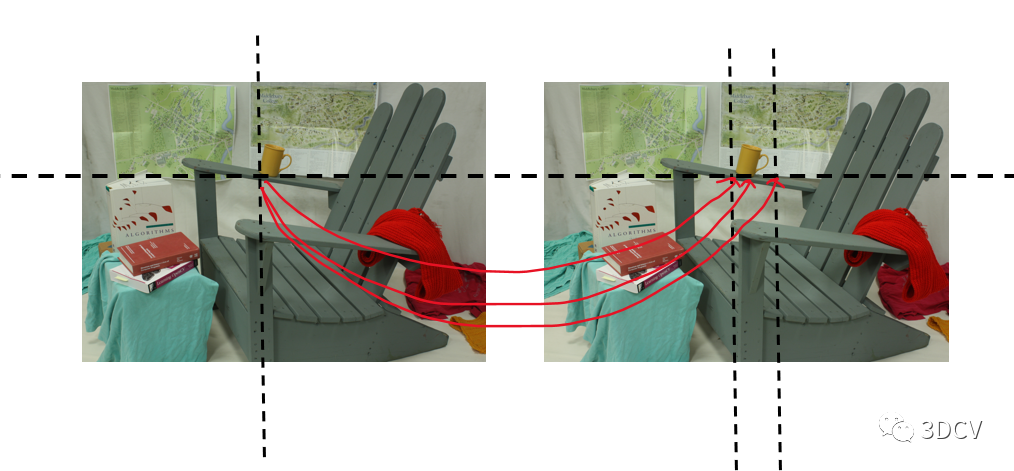
2022-10-10 17:25:311009 事實(shí)上,這些指標(biāo)都在強(qiáng)調(diào)視差圖在視差方向上的準(zhǔn)確性,卻沒(méi)有怎么強(qiáng)調(diào)視差圖與原圖之間的貼合性——或者說(shuō),它們都在強(qiáng)調(diào)Z方向的準(zhǔn)確性,卻沒(méi)有重視其在X/Y方向上的準(zhǔn)確性。
2022-10-19 15:12:111995 ? ? ? ? 審核編輯:彭靜
2022-10-31 15:13:40948 ? ? ? ? ? ? ? ? ? ? ? ? ??? ? ? ? ? ? ? ? 審核編輯:彭靜 ?
2022-10-31 16:28:41732 先通過(guò)圖像匹配進(jìn)行目標(biāo)識(shí)別(各種車(chē)型、行人、物體等),再通過(guò)目標(biāo)在圖像中的大小去估算目標(biāo)距離。這就要求在估算距離之前首先對(duì)目標(biāo)進(jìn)行準(zhǔn)確識(shí)別,是汽車(chē)還是行人,是貨車(chē)、SUV還是小轎車(chē)。
2022-11-24 10:49:118114 上實(shí)現(xiàn)雙目視覺(jué)算法stereoBM的openCL版本的移植和優(yōu)化,移植后的算法在GPU平臺(tái)上性能提升明顯。 展銳T710開(kāi)發(fā)板內(nèi)部集成了Imagination GM9446顯示芯片,主頻為800MHz
2022-11-28 10:20:05483 銀牛微電子作為全球雙目立體視覺(jué)的持續(xù)引領(lǐng)者,一直以來(lái),專(zhuān)注3D視覺(jué),以移動(dòng)機(jī)器人為切入點(diǎn),利用3D雙目視覺(jué)技術(shù)為移動(dòng)機(jī)器人導(dǎo)航避障提供精準(zhǔn)的三維立體數(shù)據(jù)信息。其推出的R132模組,具備強(qiáng)大的3D深度
2022-12-15 10:53:131283 有了深度學(xué)習(xí),可以根據(jù)3-D的ground truth來(lái)訓(xùn)練NN模型,得到3D大小和姿態(tài)估計(jì),距離是基于平行線原理(single view metrology)得到的。
2022-12-20 15:40:40670 精準(zhǔn)定位是所有自動(dòng)駕駛系統(tǒng)的基礎(chǔ)組成模塊。本文,我們專(zhuān)注于雙目相機(jī),提出一種名叫SOFT2的新方法,這是當(dāng)前KITTI評(píng)分板上排名第一的算法。
2023-01-30 11:01:011161 雙目測(cè)距的原理就說(shuō)到這里,為了避免大家看到大段純敘述性的文字頭暈,下面的行文將會(huì)以FAQ的形式圍繞著實(shí)現(xiàn)雙攝像頭測(cè)距過(guò)程中碰到的幾點(diǎn)疑惑展開(kāi)。
2023-04-26 16:47:373409 
近些年迅猛發(fā)展的3D視覺(jué)技術(shù)已成為AGV領(lǐng)域的關(guān)鍵技術(shù)之一,進(jìn)一步提升AGV智能化水平的同時(shí),也實(shí)現(xiàn)了更高效、準(zhǔn)確和安全的物流操作。在戶(hù)外環(huán)境中,用于AGV托盤(pán)或貨物識(shí)別最常見(jiàn)的兩種3D視覺(jué)技術(shù)分別是主動(dòng)雙目視覺(jué)技術(shù)和ToF(Time-of-Flight)感知技術(shù)
2023-05-31 15:52:52888 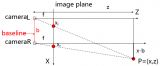
輸入數(shù)據(jù)來(lái)源可以是單目視覺(jué)相機(jī)、雙目視覺(jué)相機(jī),數(shù)據(jù)可以是灰度圖或者彩色圖。
基于單目圖片的稱(chēng)為單目車(chē)道線檢測(cè)技術(shù),基于雙目圖片的稱(chēng)為雙目車(chē)道線檢測(cè)技術(shù)。
2023-06-01 14:18:320 雙目標(biāo)定的方法有很多,常用的是基于棋盤(pán)格圖案的張氏標(biāo)定法,它利用多幅不同角度拍攝的棋盤(pán)格圖像,通過(guò)提取角點(diǎn)坐標(biāo)和求解最小二乘問(wèn)題,得到兩個(gè)相機(jī)的內(nèi)參矩陣和外參矩陣,進(jìn)而計(jì)算出基礎(chǔ)矩陣。
2023-06-06 14:35:25659 
雙目視覺(jué)傳感器有效彌補(bǔ)了數(shù)據(jù)驅(qū)動(dòng)的 AI 算法在泛化性能上的短板,深度學(xué)習(xí)模型與視差點(diǎn)云技術(shù)的結(jié)合,極大擴(kuò)張了視覺(jué)傳感器的工作邊界。
2023-06-07 14:16:32219 
雙目視覺(jué)算法stereoBM的openCL版本的移植和優(yōu)化,移植后的算法在GPU平臺(tái)上性能提升明顯。展銳T710開(kāi)發(fā)板內(nèi)部集成了ImaginationGM9446顯
2022-11-30 15:41:43302 
SGBM(Semi-Global Block Matching)是一種用于計(jì)算雙目視覺(jué)中視差(disparity)的半全局匹配算法,在OpenCV中的實(shí)現(xiàn)為semi-global block matching(SGBM)。
2023-06-28 09:29:271292 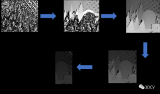
本文對(duì)ToF、雙目視覺(jué)、結(jié)構(gòu)光這三種技術(shù)展開(kāi)分析,幫助你了解其各自的特點(diǎn)及應(yīng)用
2023-07-10 16:04:16905 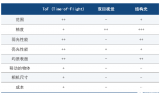
如果按照3D實(shí)現(xiàn)方式進(jìn)行劃分,TOF 則是增長(zhǎng)最快的,年均復(fù)合增長(zhǎng)達(dá)到了20.7%,然后是雙目視覺(jué)達(dá)到了17.5%,接下來(lái)是激光三角測(cè)距、CT、結(jié)構(gòu)光。雖然結(jié)構(gòu)光的增長(zhǎng)率不是最高的,但是因?yàn)槠浠鶖?shù)大,2023年接近3.7億顆。
2023-08-16 10:34:28283 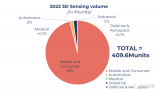
工業(yè)建模對(duì)于精度有著高要求,這意味著無(wú)人機(jī)的 SLAM 算法要提供可靠的實(shí)時(shí)位姿估計(jì)。ORB-SLAM3 是目前融合雙目視覺(jué)與 IMU 的優(yōu)秀算法,其前端是針對(duì)實(shí)時(shí)性?xún)?yōu)化的 ORB 描述子與關(guān)鍵幀
2023-09-18 10:12:49444 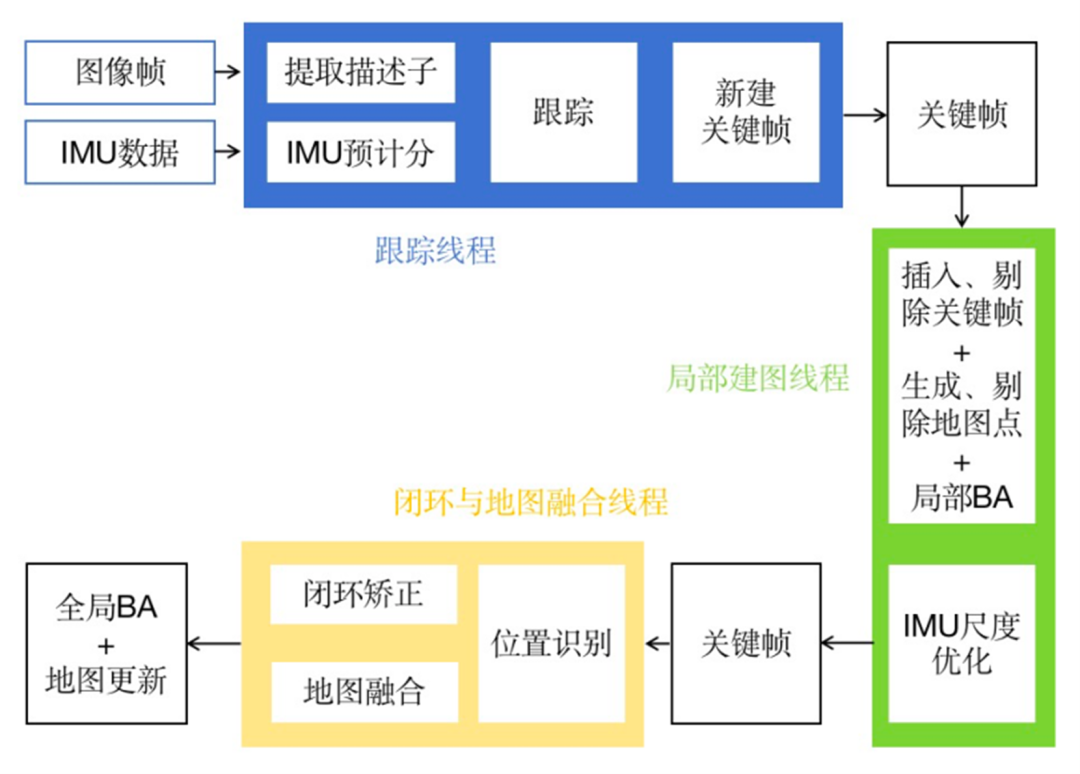
主要性能和優(yōu)勢(shì)
使用 Zynq-7000 SoC 對(duì)嵌入式應(yīng)用進(jìn)行快速原型設(shè)計(jì)以實(shí)現(xiàn)優(yōu)化
硬件、設(shè)計(jì)工具、 IP、以及預(yù)驗(yàn)證參考設(shè)計(jì)
演示嵌入式設(shè)計(jì),面向視頻通道
2024-01-09 11:03:11319 
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論