機(jī)載激光雷達(dá)是指安裝在飛行器(如飛機(jī)、直升機(jī)、無(wú)人機(jī)等)上的激光雷達(dá)系統(tǒng),用于從空中對(duì)地面或其他目標(biāo)進(jìn)行測(cè)量、成像和監(jiān)測(cè)。
2024-03-21 16:49:12 218
218 
對(duì)于模擬雷達(dá)系統(tǒng),每個(gè)子陣需要通過(guò)時(shí)間延遲單元以實(shí)現(xiàn)波束的掃描,如圖所示。對(duì)于數(shù)字雷達(dá)系統(tǒng),每個(gè)子陣的回波直接進(jìn)行接收機(jī)進(jìn)行采集。
2024-03-11 11:34:41262 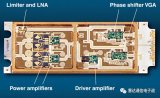
機(jī)載火控雷達(dá)誕生于第二次世界大戰(zhàn),到現(xiàn)在已經(jīng)走過(guò)了七十多年的歷程,它是現(xiàn)代戰(zhàn)斗機(jī)火控系統(tǒng)的關(guān)健設(shè)備之一。
2024-03-05 10:37:53118 一、激光雷達(dá)LiDAR工作原理激光雷達(dá)LiDAR的全稱為L(zhǎng)ightDetectionandRanging激光探測(cè)和測(cè)距,又稱光學(xué)雷達(dá)。激光雷達(dá)的工作原理:對(duì)人畜無(wú)害的紅外光束LightPluses
2024-03-05 08:11:11179 
近日,北醒新一代航空器用激光雷達(dá)產(chǎn)品通過(guò)多項(xiàng)DO-160G航空機(jī)載設(shè)備環(huán)境標(biāo)準(zhǔn)測(cè)試。
2024-02-28 14:57:00231 您好,請(qǐng)教一個(gè)問(wèn)題,我們現(xiàn)在使用CYAPI中的xferdata函數(shù)接收數(shù)據(jù)時(shí),下位機(jī)端發(fā)送的速率為62MB/s或者120MB/s時(shí),上位機(jī)調(diào)用xferdata接口函數(shù)讀取數(shù)據(jù)的耗時(shí)是一樣的,大概是
2024-02-23 07:50:38
和一個(gè)接收器組成。當(dāng)雷達(dá)設(shè)備開(kāi)始工作時(shí),發(fā)射器會(huì)發(fā)射一個(gè)高頻的雷達(dá)波束。這個(gè)波束會(huì)經(jīng)過(guò)空氣中的微小顆粒并反射回來(lái)。接收器會(huì)接收到這些反射波,并使用多普勒效應(yīng)來(lái)計(jì)算車(chē)輛的速度。 多普勒效應(yīng)是指當(dāng)光波(或雷達(dá)波)與運(yùn)動(dòng)的
2024-02-03 14:10:35339 我無(wú)法使用 MATLAB 中的 Position2 Go 雷達(dá)套件提取原始數(shù)據(jù)。
MATLAB 錯(cuò)誤:
使用串行時(shí)出錯(cuò)(第 99 行)指定了
無(wú)效的端口。
RadarSystem(第 10 行)中
2024-01-31 06:15:43
今天跟大家聊聊北斗接收機(jī),首先北斗接收機(jī)是指用于接受北斗導(dǎo)航信號(hào)并解算位置、速度、時(shí)間等信息的設(shè)備。北斗接收機(jī)的使用范圍非常廣泛,可用于車(chē)載、船載、機(jī)載等多種交通工具,也可用于測(cè)繪、農(nóng)業(yè)、氣象、地震
2024-01-16 10:51:13221 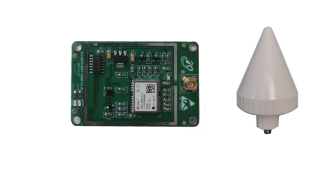
LabVIEW是一款功能強(qiáng)大的圖形化開(kāi)發(fā)環(huán)境,廣泛應(yīng)用于數(shù)據(jù)采集與處理、自動(dòng)化控制系統(tǒng)等領(lǐng)域。在串口通信應(yīng)用中,如何保證數(shù)據(jù)的穩(wěn)定傳輸是一個(gè)重要的問(wèn)題。本文將詳細(xì)介紹LabVIEW串口接收數(shù)據(jù)
2024-01-08 11:38:41370 類(lèi)型,包括連續(xù)波雷達(dá)、脈沖雷達(dá)和多普勒雷達(dá)。 一、連續(xù)波雷達(dá) 連續(xù)波雷達(dá)是一種工作頻率連續(xù)、能夠持續(xù)輸出的雷達(dá)系統(tǒng)。它的工作原理是通過(guò)發(fā)射和接收連續(xù)性的電磁波,利用目標(biāo)返回的電磁波與發(fā)射信號(hào)進(jìn)行干涉與混頻,從而實(shí)
2023-12-21 11:38:331086 激光雷達(dá)是一種通過(guò)發(fā)射激光束來(lái)檢測(cè)目標(biāo)位置,在進(jìn)行各種處理后獲得目標(biāo)信息的雷達(dá)裝置。
2023-12-21 09:25:33406 
在STM32中使用虛擬串口時(shí),我們需要處理接收的數(shù)據(jù)。接收到的數(shù)據(jù)可能是來(lái)自其他設(shè)備的傳感器數(shù)據(jù)、用戶輸入的命令或其他任何信息。在本篇文章中,我將詳細(xì)介紹STM32虛擬串口接收數(shù)據(jù)的處理方法。 首先
2023-12-20 11:22:33573 相似之處,但也存在一些顯著的差異。本文將對(duì)激光雷達(dá)和毫米波雷達(dá)進(jìn)行詳細(xì)比較與分析。 首先,我們來(lái)了解一下激光雷達(dá)和毫米波雷達(dá)的工作原理。 激光雷達(dá)利用激光束向目標(biāo)發(fā)送脈沖,并通過(guò)接收器接收目標(biāo)反射回來(lái)的光信號(hào),根據(jù)光信號(hào)的時(shí)間差和反
2023-12-19 09:54:33798 合成孔徑雷達(dá) (SAR) 是一種高分辨機(jī)載和星載遙感技術(shù),用于對(duì)地形等場(chǎng)景上的遠(yuǎn)程目標(biāo)進(jìn)行成像。
2023-12-18 16:31:11663 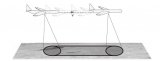
的原理和基本構(gòu)造 激光雷達(dá)利用激光的特性進(jìn)行測(cè)量。激光是一種具有高頻率和單色性的電磁波,它可以被定向聚焦成一個(gè)非常細(xì)小的光束。激光雷達(dá)工作時(shí),通過(guò)發(fā)射器發(fā)射的激光束被目標(biāo)物體反射回來(lái),再由接收器接收并轉(zhuǎn)換為電信號(hào),經(jīng)過(guò)信
2023-12-15 11:03:21396 、機(jī)器人技術(shù)等領(lǐng)域。而激光雷達(dá)芯片則是實(shí)現(xiàn)這些功能的核心組件。 一、激光雷達(dá)芯片的種類(lèi) 發(fā)射芯片:負(fù)責(zé)產(chǎn)生激光脈沖,通常采用高速脈沖調(diào)制器或直接調(diào)制器。 接收芯片:負(fù)責(zé)接收反射回來(lái)的光信號(hào),并進(jìn)行放大、濾波和數(shù)字化處理。 信號(hào)處理芯片:對(duì)接收到的數(shù)據(jù)進(jìn)
2023-12-13 15:30:32342 介紹幾種常見(jiàn)雷達(dá)模塊的感應(yīng)距離及其原理。 一、超聲波雷達(dá)模塊 超聲波雷達(dá)模塊是利用超聲波在空氣中的傳播特性進(jìn)行測(cè)距的設(shè)備。它主要由超聲波發(fā)射器和接收器組成,通過(guò)發(fā)射器發(fā)射超聲波脈沖,然后檢測(cè)接收到的超聲波信號(hào)
2023-12-12 15:06:49350 首先,Ollie Ballinger使用的是公開(kāi)可獲得的數(shù)據(jù),這些數(shù)據(jù)是通過(guò)衛(wèi)星捕獲的,他使用這些數(shù)據(jù)來(lái)檢測(cè)和追蹤軍事雷達(dá)。這意味著,任何人只要有足夠的專業(yè)知識(shí),都可以使用這些數(shù)據(jù)來(lái)查找軍事雷達(dá)發(fā)射器。
2023-12-05 14:49:58318 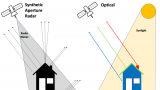
ARTM-Pn無(wú)線測(cè)溫裝置:ARTM-Pn無(wú)線測(cè)溫裝置可以單獨(dú)安裝在高壓柜、低壓抽屜柜內(nèi),每臺(tái)裝置可以接收18個(gè)傳感器的數(shù)據(jù),傳感器型號(hào)可選配ATE100、ATE200、ATE300。裝置帶有一路485接口,可將采集到的溫度數(shù)據(jù)上傳到監(jiān)控中心。
2023-11-30 14:03:12239 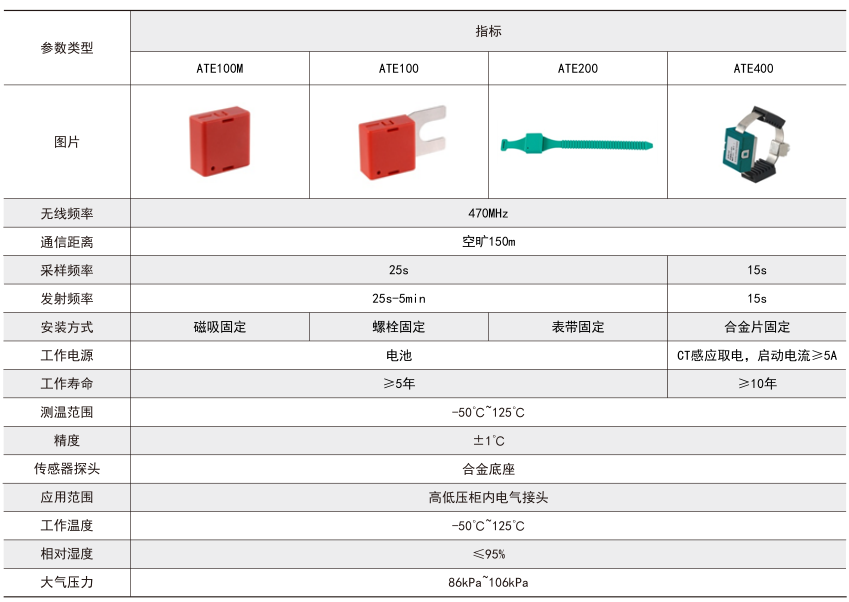
雷達(dá)水位計(jì)是一種利用雷達(dá)技術(shù)測(cè)量水位的儀器。它的原理是通過(guò)發(fā)射一束微波信號(hào),當(dāng)這束信號(hào)遇到水面時(shí),一部分信號(hào)會(huì)被反射回來(lái),然后接收
2023-11-29 15:05:35
多普勒頻移。多普勒頻移是由于目標(biāo)物體的相對(duì)速度導(dǎo)致的信號(hào)頻率的變化。
2. 發(fā)射和接收:毫米波雷達(dá)通過(guò)發(fā)射一定頻率的信號(hào),然后接收反射回來(lái)的信號(hào)。如果目標(biāo)物體靜止,反射回來(lái)的信號(hào)頻率不會(huì)發(fā)生變化。但是如果目標(biāo)物體在運(yùn)動(dòng),所反射回來(lái)的信號(hào)頻率將與發(fā)射信號(hào)的頻率有所偏移。
2023-11-22 17:41:431017 在單脈沖跟蹤體制未獲使用前,圓錐掃描體制的雷達(dá)很難對(duì)付敵方施放的角度欺騙干擾;沒(méi)有相參體制的脈沖多普勒雷達(dá),就無(wú)法對(duì)付借著強(qiáng)大的地雜波掩護(hù)的低空入侵的飛機(jī)和導(dǎo)彈
2023-11-21 16:02:47421 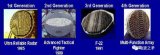
1、測(cè)量原理 雷達(dá)液位計(jì)于20世紀(jì)60年代問(wèn)世,通常采用調(diào)頻雷達(dá)原理,利用同步調(diào)頻脈沖技術(shù),將微波發(fā)射器和接收器安裝在液面上方,向液面發(fā)射經(jīng)過(guò)頻率調(diào)制的微波信號(hào)。發(fā)射和接收到的微波信號(hào)存在時(shí)間延遲
2023-11-21 09:15:51854 號(hào)檢測(cè)。實(shí)現(xiàn)寬帶系統(tǒng)下的雷達(dá)脈沖信號(hào)檢測(cè),主要面對(duì)低信噪比下的信號(hào)檢測(cè)、適應(yīng)信號(hào)和接收環(huán)境的動(dòng)態(tài)閾值檢測(cè)等問(wèn)題。
2023-11-19 10:21:44488 
雷達(dá)回波信號(hào)有兩個(gè)狀態(tài):有目標(biāo)和沒(méi)有目標(biāo)。雷達(dá)接收的回波中,既可能有目標(biāo)回波也存在噪聲和雜波等各種干擾信號(hào)。所以雷達(dá)目標(biāo)回波信號(hào)的檢測(cè)是在噪聲和雜波干擾背景中的二元信號(hào)最佳檢測(cè)問(wèn)題。
2023-11-18 09:16:45815 
上方是發(fā)送數(shù)據(jù)的例子,那么串口接收又該如何配置,又要在串口發(fā)送的例子上做哪些更改呢? 這里我們可以通過(guò)查詢或者中斷的方式來(lái)進(jìn)行接收數(shù)據(jù)的兩種方式。 查詢方式就是通過(guò)不斷的查詢RXNE標(biāo)志位,通過(guò)判斷
2023-11-10 16:20:57740 
電子發(fā)燒友網(wǎng)站提供《機(jī)載CAN總線節(jié)點(diǎn)的模塊化設(shè)計(jì)與實(shí)現(xiàn).pdf》資料免費(fèi)下載
2023-10-31 10:15:40 0
0 電磁雷達(dá)使用電磁波進(jìn)行探測(cè)和測(cè)量。它通過(guò)發(fā)射無(wú)線電頻率的電磁波,并接收其反射回來(lái)的信號(hào)來(lái)計(jì)算目標(biāo)的距離、速度和角度等信息。激光雷達(dá)則使用激光束進(jìn)行探測(cè)和測(cè)量。
2023-10-30 17:43:412288 成像雷達(dá)是一種主動(dòng)合成系統(tǒng)。安裝在平臺(tái)上的天線
一個(gè)側(cè)面朝地球表面方向的雷達(dá)信號(hào)。反射信號(hào),
被稱為回波,從表面被反散射,并在一秒鐘后接收到。
同一天線(單站雷達(dá))。
2023-10-30 09:31:32176 
雙基地雷達(dá)概念
雙基地雷達(dá)可以定義為發(fā)射機(jī)和接收機(jī)位于不同位置的雷達(dá),而不是常規(guī)的單基地雷達(dá)。
最早的雷達(dá)是雙基地的,直到脈沖波形和T/R開(kāi)關(guān)的出現(xiàn)。
雙基地雷達(dá)可以使用自己的專用發(fā)射機(jī)或機(jī)會(huì)輻射源(發(fā)射機(jī))運(yùn)行。
2023-10-27 10:22:071013 
串口接收的數(shù)據(jù) 存在數(shù)組里 采取覆蓋的方式 第二次接收的時(shí)候要是還沒(méi)接收完就處理主函數(shù)的東西 不是會(huì)產(chǎn)生錯(cuò)誤 這種情況應(yīng)該怎么辦呢
2023-10-27 07:53:23
由于機(jī)載雷達(dá)的地物雜波呈現(xiàn)為空時(shí)二維耦合譜特性,這就決定了機(jī)載雷達(dá)雜波抑制基本屬于空時(shí)二維濾波問(wèn)題,而且,其二維處理需實(shí)時(shí)自適應(yīng)實(shí)現(xiàn),即雜波抑制需使用空時(shí)二維自適應(yīng)處理(STAP)。
2023-10-26 14:35:33694 
LPI雷達(dá)的目的是“我能看到對(duì)方,但對(duì)方看不到我”。也即雷達(dá)能在電子戰(zhàn)截獲接收機(jī)可檢測(cè)雷達(dá)信號(hào)范圍外發(fā)現(xiàn)目標(biāo)。
2023-10-26 14:29:26860 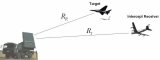
壓制式干擾即發(fā)射信號(hào)(當(dāng)被雷達(dá)接收時(shí)),降低雷達(dá)處理回波信號(hào)的能力。一般而言,壓制式干擾采用噪聲調(diào)制,然而在某些情況下也會(huì)采用其他調(diào)制樣式壓制雷達(dá)的特殊工作模式。
2023-10-24 16:16:481291 
電子發(fā)燒友網(wǎng)站提供《美升級(jí)臺(tái)灣F-16機(jī)載雷達(dá)的關(guān)鍵技術(shù)分析.pdf》資料免費(fèi)下載
2023-10-24 11:40:170 電子發(fā)燒友網(wǎng)站提供《GPS接收機(jī)載波跟蹤環(huán)設(shè)計(jì)與分析.pdf》資料免費(fèi)下載
2023-10-24 11:23:301 合成孔徑雷達(dá)(Sy nthetic Aperture Radar :SAR)是利用一個(gè)小天線沿著長(zhǎng)線陣的軌跡等速移動(dòng)并輻射相參信號(hào), 把在不同位置接收的回波進(jìn)行相干處理, 從而獲得較高分辨率的成像
2023-10-23 09:51:26695 
不同雷達(dá)的電磁信號(hào)調(diào)制方式 雷達(dá)是一種通過(guò)發(fā)送電磁波并接收其反射信號(hào)來(lái)探測(cè)物體的儀器。根據(jù)雷達(dá)的電磁信號(hào)調(diào)制方式不同,可以分為:脈沖雷達(dá)、連續(xù)波雷達(dá)和調(diào)頻雷達(dá)。本文將詳細(xì)介紹這三種雷達(dá)的特點(diǎn)
2023-10-20 14:21:42733 音圈模組助力大疆發(fā)布全新激光雷達(dá)。眾所周知,大疆機(jī)載激光雷達(dá)技術(shù)可廣泛應(yīng)用于測(cè)繪、電力、林業(yè)、工程基建等多種行業(yè)。近日,大疆正式發(fā)布全新一體化行業(yè)應(yīng)用激光雷達(dá)負(fù)載禪思L2,這是繼大疆首款激光雷達(dá)負(fù)載
2023-10-20 08:59:26261 單片機(jī)接收數(shù)據(jù)幀幀頭幀尾校驗(yàn)數(shù)據(jù)解析
2023-10-17 17:23:44806 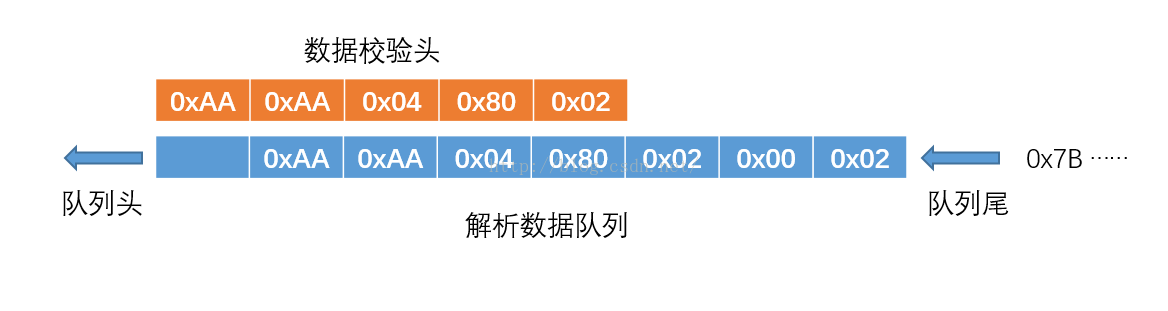
基于RA2L1實(shí)現(xiàn)串口DTC數(shù)據(jù)接收
2023-10-10 09:34:34115 
雷達(dá)料位計(jì)主要由發(fā)射和接收裝置、信號(hào)處理器、操作面板、顯示器、天線、故障報(bào)警裝置等 6部分組成。 雷達(dá)料位計(jì)利用雷達(dá)波的特性來(lái)檢測(cè)料位,其基本工作原理為發(fā)射—反射—接收。雷達(dá)料位計(jì)的天線以波束的形式
2023-09-27 07:19:31597 首先說(shuō)明一下接收機(jī)中的信號(hào)放大和增益控制。雷達(dá)中都會(huì)使用對(duì)接收信號(hào)進(jìn)行放大系數(shù)控制的增益控制技術(shù)。來(lái)拆解這句話:雷達(dá)對(duì)于不同距離目標(biāo)的回波,其信號(hào)強(qiáng)度區(qū)別很大,遠(yuǎn)距離的目標(biāo)回波信號(hào)弱,近距離目標(biāo)的回波信號(hào)很強(qiáng)。
2023-09-20 11:32:18940 STM32串口發(fā)送數(shù)據(jù)和接收數(shù)據(jù)方式總結(jié)
2023-09-19 09:14:525081 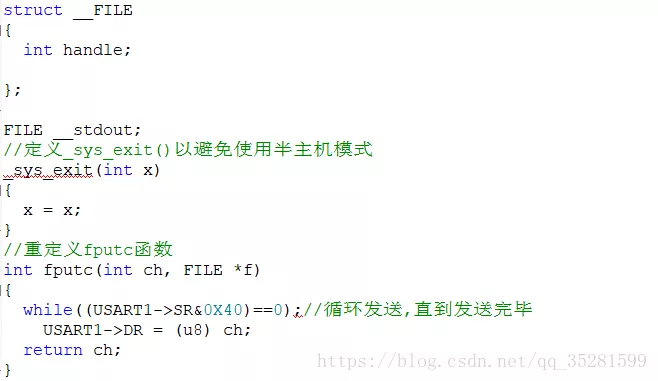
使用UART IDLE中斷接收不定長(zhǎng)數(shù)據(jù)
2023-09-18 15:41:24521 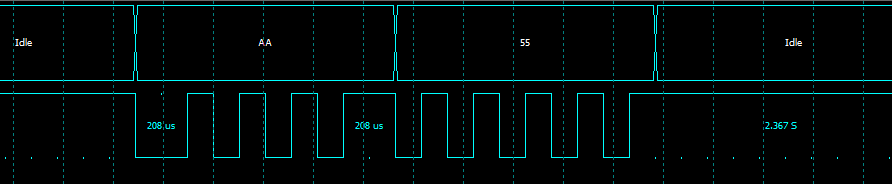
探地雷達(dá)又稱地質(zhì)雷達(dá)、透地雷達(dá),是一種利用無(wú)線電波來(lái)探測(cè)地下介質(zhì)分布情況的無(wú)損探測(cè)儀器。探地雷達(dá)通常由主機(jī)、發(fā)射機(jī)、發(fā)射天線、接收機(jī)、接收天線五部分組成。作為一種高精度的無(wú)損探測(cè)技術(shù),探地雷達(dá)目前
2023-09-06 10:52:03328 
雷達(dá)液位計(jì)是一種常用于工業(yè)過(guò)程控制的儀器,它通過(guò)發(fā)送和接收雷達(dá)信號(hào)來(lái)測(cè)量液體的高度。在安裝雷達(dá)液位計(jì)時(shí),我們必須遵循一些注意事項(xiàng),以確保其準(zhǔn)確性和可靠性。本文將介紹雷達(dá)液位計(jì)的安裝注意事項(xiàng)。 首先
2023-09-05 16:01:21421 激光雷達(dá)的基本構(gòu)成 激光雷達(dá)前景分析 激光雷達(dá)基本構(gòu)成 激光雷達(dá)是利用激光信號(hào)進(jìn)行測(cè)距的設(shè)備,其基本構(gòu)成包括激光器、掃描機(jī)構(gòu)、接收器、信號(hào)處理單元和數(shù)據(jù)輸出單元。 (1)激光器:激光雷達(dá)的核心部件
2023-08-23 16:28:082152 雷達(dá)系統(tǒng)通常通過(guò)將天線連接到強(qiáng)大的無(wú)線電發(fā)射器來(lái)發(fā)射短脈沖信號(hào)來(lái)工作。然后斷開(kāi)發(fā)射器的連接,天線連接到敏感的接收器,該接收器放大來(lái)自目標(biāo)物體的任何回波。通過(guò)測(cè)量信號(hào)返回所需的時(shí)間,雷達(dá)接收器可以確定
2023-08-23 10:07:11866 
固態(tài)激光雷達(dá)通常分為哪三種類(lèi)型?mems固態(tài)激光雷達(dá)? 固態(tài)激光雷達(dá)是一種基于激光技術(shù)的高精度測(cè)量?jī)x器,它利用激光器發(fā)射激光束,并通過(guò)接收器接收反射回來(lái)的激光信號(hào),根據(jù)信號(hào)的時(shí)間差來(lái)計(jì)算出目標(biāo)的距離
2023-08-22 16:45:361602 簡(jiǎn)述激光雷達(dá)的結(jié)構(gòu)原理分類(lèi)及特點(diǎn) TIM320激光雷達(dá)的工作原理? 激光雷達(dá)是一種高精度的探測(cè)裝置,可以在三維空間中進(jìn)行高精度的距離測(cè)量和空間信息采集。激光雷達(dá)的主要結(jié)構(gòu)包括光源、掃描系統(tǒng)、接收系統(tǒng)
2023-08-22 16:45:302035 什么是固態(tài)雷達(dá)?固態(tài)激光雷達(dá)原理 固態(tài)雷達(dá)是一種采用固態(tài)材料發(fā)射和接收雷達(dá)信號(hào)的雷達(dá)系統(tǒng)。不同于傳統(tǒng)雷達(dá)采用開(kāi)關(guān)型微波管的方式,固態(tài)雷達(dá)利用半導(dǎo)體元器件實(shí)現(xiàn)信號(hào)發(fā)射和接收。隨著半導(dǎo)體技術(shù)的發(fā)展,固態(tài)
2023-08-22 16:45:272681
應(yīng)用:本示例代碼使用 M480 MCU 和 NAU88L25 音頻編碼設(shè)備執(zhí)行USB 合成裝置,該裝置以USB 音頻等級(jí)1.0(UAC1.0)和氣體放電等級(jí)為基礎(chǔ)。
BSP 版本:M480系列
2023-08-22 06:39:51
一個(gè)RF感應(yīng)雷達(dá)模塊電路,原來(lái)需要接主機(jī)軟件才能使用雷達(dá)感應(yīng)功能,可否單獨(dú)使用此模塊、紅色框電源和信號(hào)接口,黃色框是負(fù)載,綠色發(fā)射模塊,上電紅框內(nèi)第1/2線有12V電壓、4/6電壓輸出很低、負(fù)載正負(fù)無(wú)電壓。如何不通過(guò)原主機(jī)解決信號(hào)接入輸出問(wèn)題、還望各位師傅給講解一下。謝謝
2023-08-20 00:57:09
數(shù)字接收處理:是指通過(guò)對(duì)接收到的信號(hào)進(jìn)行數(shù)字化處理,如濾波、檢測(cè)、跟蹤、識(shí)別等,以提高雷達(dá)的性能和功能。
2023-08-17 10:05:352442 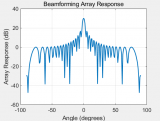
大致等于波長(zhǎng)比上天線長(zhǎng)度。當(dāng)距離給定時(shí),工作在極短的波長(zhǎng)或采用長(zhǎng)的天線,又或者二者同時(shí)采用,就能獲得高的方位分辨力。但是極短的波長(zhǎng)面臨的大氣衰減會(huì)異常嚴(yán)重,另一方面機(jī)載雷達(dá)的天線又不可能做的太長(zhǎng)。為了擺脫這個(gè)困境,合成孔徑雷達(dá)(SAR)應(yīng)運(yùn)而生。
</span>
2023-08-16 09:42:23
首先,文章介紹了脈沖多普勒雷達(dá)的基本原理和功能。脈沖多普勒雷達(dá)具有測(cè)量目標(biāo)距離和速度的能力,這是通過(guò)發(fā)射脈沖信號(hào)并接收從目標(biāo)反射回來(lái)的信號(hào)來(lái)實(shí)現(xiàn)的。由于目標(biāo)的移動(dòng),接收到的信號(hào)的頻率會(huì)發(fā)生變化,這就是常說(shuō)的多普勒效應(yīng)。通過(guò)分析多普勒頻率的改變,雷達(dá)系統(tǒng)可以確定目標(biāo)的速度和位置。
2023-08-06 10:43:53719 
雷達(dá)接收機(jī)的性能影響著整個(gè)無(wú)線電通信系統(tǒng)的性能,由于現(xiàn)在電子設(shè)備的不斷增多,電磁環(huán)境日益錯(cuò)綜復(fù)雜,相互干擾十分嚴(yán)重,使得接收機(jī)接收到越來(lái)越多的干擾信號(hào),所以對(duì)接收機(jī)接收信號(hào)的能力要求越來(lái)越高,如何提高其靈敏度以及改善其選擇性,成為無(wú)線電通信系統(tǒng)設(shè)計(jì)中越來(lái)越重要的方面。
2023-08-01 09:46:21261 
ELTA的ELM-2052是一種先進(jìn)的火控雷達(dá)(FCR),專為空對(duì)空優(yōu)勢(shì)和打擊任務(wù)而設(shè)計(jì),基于全固態(tài)有源電子掃描陣列(AESA)技術(shù),使雷達(dá)能夠?qū)崿F(xiàn)長(zhǎng)探測(cè)范圍,高任務(wù)可靠性和多目標(biāo)跟蹤能力。
2023-07-27 10:02:04869 
如果采用查詢接收方式接受串口數(shù)據(jù),就會(huì)造成接收不及時(shí),還沒(méi)接收完數(shù)據(jù),下一個(gè)數(shù)據(jù)就發(fā)過(guò)來(lái)了,就會(huì)把上一個(gè)數(shù)據(jù)覆蓋了,造成數(shù)據(jù)丟失。
2023-07-21 17:07:244559 
接收機(jī)是雷達(dá)系統(tǒng)中必不可少的的一部分,而接收機(jī)性能也關(guān)系到雷達(dá)的正作。接收機(jī)根據(jù)其系統(tǒng)架構(gòu)可以分成:超外差接收機(jī)、寬帶中頻接收機(jī)、零中頻接收機(jī)、數(shù)字中頻接收機(jī)等。接收機(jī)也朝著高集成度、低功耗、射頻前端的軟件化、數(shù)字化發(fā)展。
2023-07-21 09:38:011421 
一、激光雷達(dá)的結(jié)構(gòu) 激光雷達(dá)的關(guān)鍵部件按照信號(hào)處理的信號(hào)鏈包括控制硬件DSP(數(shù)字信號(hào)處理器)、激光驅(qū)動(dòng)、激光發(fā)射發(fā)光二極管、發(fā)射光學(xué)鏡頭、接收光學(xué)鏡頭、APD(雪崩光學(xué)二極管)、TIA(可變
2023-07-14 11:14:041158 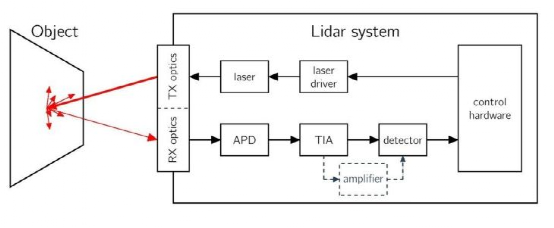
TPY-4雷達(dá)的多任務(wù)能力是通過(guò)其全數(shù)字化的發(fā)射/接收陣元和軟件定義的傳感器架構(gòu)實(shí)現(xiàn)的。雷達(dá)的數(shù)字化陣元和軟件控制的數(shù)字發(fā)射機(jī)和接收機(jī)提供了靈活性,可以快速改變性能以適應(yīng)新的任務(wù)和環(huán)境,同時(shí)適應(yīng)未來(lái)先進(jìn)威脅。
2023-07-09 15:44:25928 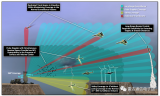
帶機(jī)載處理的微型光譜儀用于移動(dòng)應(yīng)用和工業(yè)集成
2023-07-06 15:23:310 嘉可儀表雷達(dá)液位計(jì)一般是由發(fā)射器和天線組成,基本測(cè)量過(guò)程包括電磁波信號(hào)的發(fā)射、反射、接收三個(gè)階段。液位計(jì)會(huì)根據(jù)接收信號(hào)自動(dòng)計(jì)算出石油儲(chǔ)罐液位值,電磁波到液面的距離與其發(fā)射到接收電磁波信號(hào)的過(guò)程時(shí)間
2023-07-05 15:27:05432 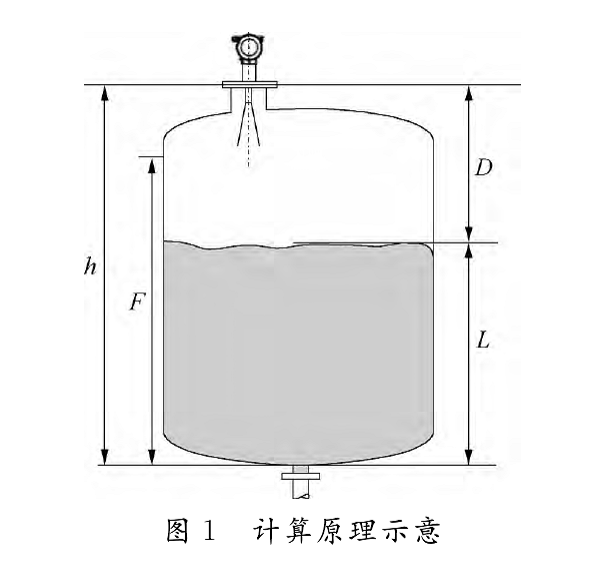
根據(jù)雷達(dá)波工作原理,嘉可儀表JK型雷達(dá)液位計(jì)采用了發(fā)射雷達(dá)波—反射雷達(dá)波—接收雷達(dá)波的工作模式。在工作時(shí)雷達(dá)液位計(jì)的發(fā)射端發(fā)出調(diào)頻連續(xù)波信號(hào),雷達(dá)波信號(hào)在觸碰到液面后反射回來(lái)并被雷達(dá)波接收端接收
2023-07-03 10:50:03185 隨著機(jī)載激光雷達(dá)技術(shù)的日益發(fā)展,其在測(cè)繪行業(yè)的應(yīng)用越來(lái)越成熟,尤其在大比例地形圖的應(yīng)用中,具有無(wú)可替代的作用。本文將完整復(fù)盤(pán)點(diǎn)云數(shù)據(jù)處理技術(shù)流程,以高植被山區(qū)地區(qū)為例。 什么是點(diǎn)云? 點(diǎn)云是通過(guò)機(jī)載
2023-06-25 11:30:461556 飛行時(shí)間(ToF)激光雷達(dá)面臨的一個(gè)更困難的挑戰(zhàn)是接收信號(hào)鏈所需的高靈敏度。通常,準(zhǔn)直(平行光線)激光脈沖被發(fā)送到一個(gè)點(diǎn)。準(zhǔn)直激光源的優(yōu)點(diǎn)是它限制了發(fā)散造成的光損失,并使光斑尺寸在距離內(nèi)保持恒定。然而,一旦光線照射到物體上,這種光就會(huì)向多個(gè)方向反彈——這稱為散射。
2023-06-15 15:26:54764 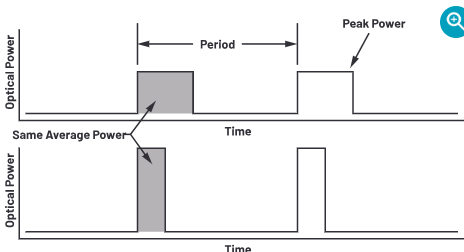
雷達(dá)成像技術(shù)是上個(gè)世紀(jì) 50 年代發(fā)展起來(lái)的,它是雷達(dá)發(fā)展的一個(gè)重要里程碑。目前,機(jī)載和星載雷達(dá)成像的應(yīng)用已十分廣泛。
2023-06-15 09:53:46991 
與優(yōu)點(diǎn),指出了適合應(yīng)用的場(chǎng)合及安裝要求。 一、雷達(dá)液位計(jì)的測(cè)量原理與特點(diǎn) 雷達(dá)液位計(jì)是利用超高頻電磁波經(jīng)天線向被測(cè)容器的液面發(fā)射,當(dāng)電磁波到達(dá)液面后反射回來(lái),被同一天線接收并檢測(cè)出發(fā)射波及回波的時(shí)差,從而計(jì)算出液
2023-06-14 10:35:11498 
接著來(lái)說(shuō)接收機(jī)的指標(biāo),今天聊一聊接收機(jī)噪聲系數(shù)的問(wèn)題。
2023-06-13 17:42:382033 
接收機(jī)指標(biāo)中補(bǔ)充最后一個(gè)需要關(guān)注的指標(biāo),雖然這個(gè)指標(biāo)也是選好以后我們管不了(完全靠設(shè)計(jì)師的選擇),但是它里面涉及一些重要的原理知識(shí)。
2023-06-13 17:30:40865 本文介紹了 24 GHz ISM 頻段內(nèi)調(diào)頻連續(xù)波 (FMCW) 雷達(dá)的生成。這包括此類(lèi)雷達(dá)系統(tǒng)所需的主要構(gòu)建模塊,例如斜坡生成、發(fā)射和接收級(jí)、下變頻和采樣。
2023-06-13 11:08:021730 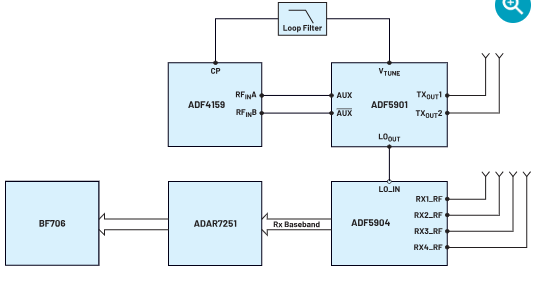
電子測(cè)量技術(shù)。它發(fā)射毫米波,并依靠反射回來(lái)的毫米波信號(hào)來(lái)測(cè)量物體的距離、速度和位置。毫米波雷達(dá)導(dǎo)線弧垂監(jiān)測(cè)是基于毫米波雷達(dá)的輸電線路導(dǎo)線弧垂監(jiān)測(cè)裝置。
2023-06-09 15:52:34
幅度移鍵控 (ASK) 和開(kāi)關(guān)鍵控 (OOK) 接收器用于間歇性低數(shù)據(jù)速率應(yīng)用,如 RKE、家庭安全、車(chē)庫(kù)門(mén)開(kāi)啟器和遙控器。從遠(yuǎn)程發(fā)射器傳輸?shù)紸SK或OOK接收器的數(shù)據(jù)在數(shù)據(jù)切片器中重建。因此,數(shù)據(jù)
2023-06-09 15:41:22331 
UART接收數(shù)據(jù)部分是接收另一個(gè)串口設(shè)備發(fā)送的數(shù)據(jù),緩存到接收FIFO中。FIFO快要寫(xiě)滿時(shí),產(chǎn)生中斷通知CPU拿取數(shù)據(jù),實(shí)現(xiàn)串口數(shù)據(jù)的接收。
2023-06-05 15:24:282549 
連續(xù)波雷達(dá)發(fā)送的是一個(gè)連續(xù)的無(wú)線電頻率信號(hào),通過(guò)接收目標(biāo)反射回來(lái)的回波信號(hào)來(lái)檢測(cè)目標(biāo)并計(jì)算距離。連續(xù)波雷達(dá)的優(yōu)點(diǎn)是信號(hào)處理簡(jiǎn)單、便于制造和使用,但其缺點(diǎn)是抗干擾性能較差,難以精確測(cè)量高速目標(biāo)的速度等問(wèn)題。常見(jiàn)的連續(xù)波雷達(dá)包括移動(dòng)雷達(dá)、陣列雷達(dá)、固定波束雷達(dá)等。
2023-06-02 18:00:316215 天線是雷達(dá)的傳感器,它的主要作用是接收目標(biāo)反射回來(lái)的信號(hào)并將其送到接收機(jī)中進(jìn)一步的處理。天線的種類(lèi)和形式十分多樣,如微帶天線、開(kāi)口波導(dǎo)天線等。
2023-06-02 17:56:267892 本例展示了如何模擬單站脈沖雷達(dá)的接收信號(hào)以估計(jì)目標(biāo)距離。單站脈沖雷達(dá)的發(fā)射器與接收器物理位置上可以認(rèn)為是同一個(gè)點(diǎn)。
2023-05-29 17:29:091226 
在雷達(dá)接收機(jī)中,經(jīng)常看到關(guān)于接收機(jī)線性放大和不能飽和的表述,為何?
2023-05-24 11:06:56814 1、測(cè)量原理 雷達(dá)水位計(jì)是一種非接觸式水位測(cè)量?jī)x器,采用發(fā)射—反射—接收的工作模式,通過(guò)天線發(fā)射電磁波至水面,電磁波經(jīng)水面反射后,由天線接收,電磁波從發(fā)射到接收的時(shí)間與到水面的距離成正比,通過(guò)
2023-05-24 07:50:13662 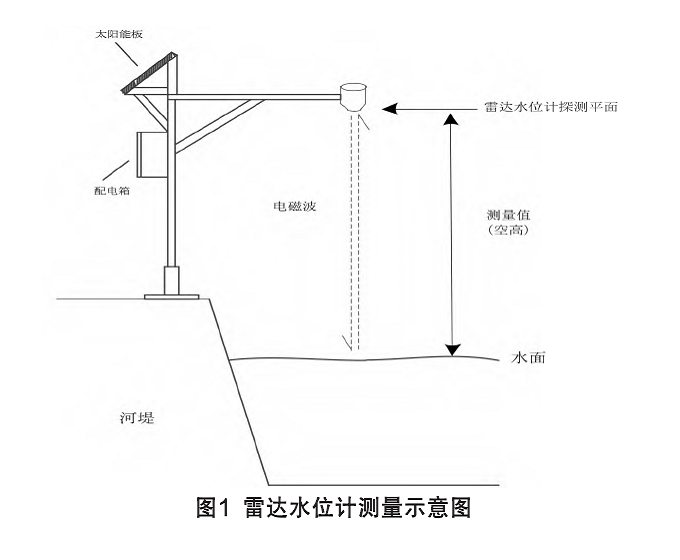
根據(jù)雷達(dá)原理,被測(cè)目標(biāo)會(huì)把接收到的電磁波反射回雷達(dá),不過(guò)反射回來(lái)的電磁波肯定和發(fā)射出去時(shí)的電磁波變得有點(diǎn)不一樣了。
2023-05-18 10:59:113221 
在雷達(dá)接收機(jī)中正交IQ信號(hào)的具體作用是什么?
2023-05-16 17:08:48
分體式雷達(dá)液位計(jì)是一種用來(lái)測(cè)量容器內(nèi)液體或固體物料液位的設(shè)備。它由兩部分組成:一個(gè)安裝在容器頂部的發(fā)射器和一個(gè)安裝在容器底部的接收器。發(fā)射器發(fā)射雷達(dá)信號(hào)(通常是微波信號(hào))到液位上方,并且當(dāng)信號(hào)遇到液體或物料時(shí),部分能量會(huì)被反射回接收器。接收器會(huì)接收到反射回來(lái)的信號(hào)并進(jìn)行分析,從而確定液位的高度。
2023-05-15 13:41:21488 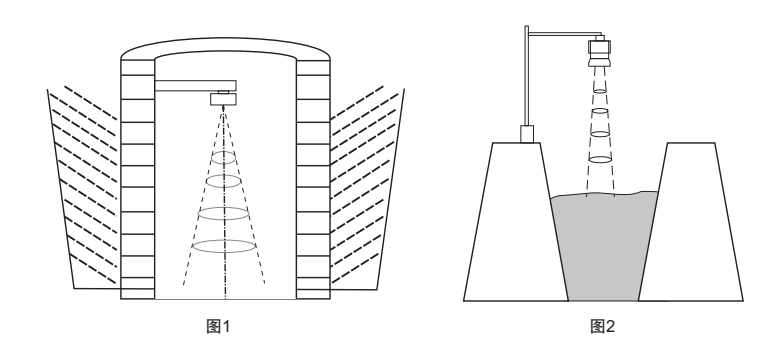
哥 ? 早在今年( 2023年 )的上海國(guó)際汽車(chē)展會(huì)上,采埃孚(ZF)官方宣布將重磅推出4D成像雷達(dá)開(kāi)發(fā)環(huán)境和帶標(biāo)注的數(shù)據(jù)集,這是采埃孚首次將4D成像毫米波雷達(dá)開(kāi)發(fā)環(huán)境和數(shù)據(jù)集向客戶開(kāi)放,也是目前大家最具期待的4D成像毫米波雷達(dá)數(shù)據(jù)集之一。 ? 隨著 采埃孚 數(shù)
2023-05-15 09:32:101019 
雷達(dá)傳感器的天線以波束的形式發(fā)射電磁波信號(hào),發(fā)射波在被測(cè)物料表面產(chǎn)生反射,反射回來(lái)的回波信號(hào)仍由天線接收。
2023-05-11 09:36:06357 在本文中提出了在發(fā)送端使用波形分集,在接收端使用相干處理。用于機(jī)載目標(biāo)監(jiān)視的地面雷達(dá),以解決距離模糊并壓制地面 雜亂,以及風(fēng)力渦輪機(jī)的干擾。
2023-05-04 14:50:07514 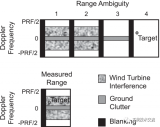
在串口+DTC功能時(shí)無(wú)法得知接收一幀數(shù)據(jù)是否接收結(jié)束。本例程配合ELC功能聯(lián)動(dòng)定時(shí)器來(lái)判斷串口接收字節(jié)與字節(jié)之間超時(shí)來(lái)判斷一幀數(shù)據(jù)的接收完成。
2023-05-04 10:50:59502 
利用電磁波回波測(cè)距原理實(shí)現(xiàn)料位測(cè)量。雷達(dá)料位計(jì)主要分為發(fā)射和接收設(shè)備、天線、控制面板、信號(hào)處理器等,發(fā)射-反射-接收是雷達(dá)料位計(jì)工作的基本原理。 其工作原理為由雷達(dá)傳感器的天線發(fā)射束波形的雷達(dá)信號(hào),當(dāng)碰到飼
2023-05-02 08:17:10611 平均功率Pav:AN/TPY-2雷達(dá)平均功率取81000W。這是根據(jù)發(fā)射/接收模塊的數(shù)量乘以每個(gè)模塊的平均功率(取3.2 W)。
2023-04-29 08:37:001193 激光雷達(dá)測(cè)量技術(shù)可以為城市建設(shè)、工程建設(shè)等提供各種比例尺數(shù)字地形圖、影像圖、三維地形模型、各類(lèi)專題圖等數(shù)據(jù),利用周期性采集的激光點(diǎn)云,形成走廊地表的變化量(如地形變化、植被砍伐量等)及變化趨勢(shì)。
2023-04-26 08:13:001466 在普通的PCB基板上實(shí)現(xiàn)天線的功能,需要在較小的集成空間中保持天線足夠的信號(hào)強(qiáng)度。3:毫米波雷達(dá)基本工作原理1)利用高頻電路產(chǎn)生特定調(diào)制頻率(FMCW)的電磁波,并通過(guò)天線發(fā)送電磁波和接收從目標(biāo)反射
2023-04-18 11:42:23
脈沖壓縮雷達(dá)最常見(jiàn)的調(diào)制信號(hào)是線性調(diào)頻信號(hào),接收時(shí)采用匹配濾波器壓縮脈沖。脈沖壓縮雷達(dá)能同時(shí)提高雷達(dá)的作用距離和距離分辨率。
2023-04-10 11:32:50879 你好:我用IIC demo的時(shí)候,例程中master發(fā)送數(shù)據(jù)slave去接收,但是沒(méi)有master接收數(shù)據(jù)的接口I2c_HLD_LPI2C_Transfer_S32K344:C
2023-03-31 08:48:12
類(lèi)型:接收器 協(xié)議類(lèi)別:LVDS 驅(qū)動(dòng)器/接收器數(shù):0/4 數(shù)據(jù)速率:400Mbps
2023-03-28 18:28:02
類(lèi)型:接收器 協(xié)議類(lèi)別:LVDS 驅(qū)動(dòng)器/接收器數(shù):0/4 數(shù)據(jù)速率:400Mbps
2023-03-28 18:28:01
ATK-HSWLDBG無(wú)線調(diào)試器-帶小接收端 BURNER 5V
2023-03-28 13:05:52
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論