

本項目打造了一款高靈活、高精度、超安全的仿生機器手,讓人形機器人也能輕松拿捏,實現“觸手可及”的智能操作。不管是抓、搬、放,還是清掃、整理、照顧,它都能一手搞定!——南京信息工程大學-觸手可及團隊
一、創新點
1高度集成化 通過 ROS 模塊化架構,我們實現了驅動器、傳感器和控制單元的緊湊設計, 提升了系統的能源效率和便攜性。ROS 的硬件抽象和中間件功能簡化了組件間 的高效通信和同步。
2 多模態感知 機器手集成了觸覺、視覺、力覺等多種傳感器,通過 ROS 的數據融合功能, 增強了環境感知能力,提高了操作的安全性和效率。
3 高可拓展性 采用模塊化設計,關鍵組件標準化,便于快速更換和升級。接口標準化確保 了與第三方配件和現有系統的廣泛兼容性,增強了適應性和靈活性。
4 人工智能學習 利用機器學習和人工智能技術開發控制算法,機器手能夠精確控制動作并 根據環境反饋自動調整,提升了自主性和學習能力,適應復雜和動態的工作環境。
二、方案論證與設計
想象一下,一只超靈活、超精準、超安全的機器手,能像人一樣自如抓取物品,還能在家里揮舞“魔法”,掃地、整理、照看全搞定!下面是我們的“幕后黑科技”:
- 機械結構設計
- 整體結構: 我們的機器手采用了“跳繩式”驅動,用輕質繩索代替沉重電機,讓動作范圍更大、反應更快,簡直就是給機器手裝上了“超跑引擎”。通過 CAD 和運動學分析優化繩索布局,搭建了一個動態張緊系統,確保每個關節都穩如老僧入定。
- 關節設計: 模仿人手的彎曲與伸展,利用繩索和軸承組合,打造出能比拼復雜手勢的“多面手”。繩索的調節性讓你隨心所欲地變換動作,就像在調味品中加入不同的佐料。
- 材料與加工: 選用 PLA 材料,既輕又省錢,還能 3D 打印,真是省時又省力。經過精細調參、熱處理和表面涂層,每個部件都練就了一身“鋼筋鐵骨”,耐用又抗磨損。
- 電路結構設計
- 電源管理: 就像家中電閘保證每個電器穩定工作,我們的電源管理系統確保每個組件都能吃飽“電能大餐”,還自帶過載保護功能,保證安全無虞。
- 傳感器電路: 配備 BMP280 和 MPU6050 等傳感器,分別負責測氣壓、溫度和姿態,就像給機器手裝上了超靈敏的“偵查雷達”,實時捕捉環境信息。
- 控制電路: 這里是機器手的大腦!通過 FLASH 存儲器、CAN 總線和譯碼器電路,把各個“神經元”緊密相連,確保指令傳達快、準、狠。
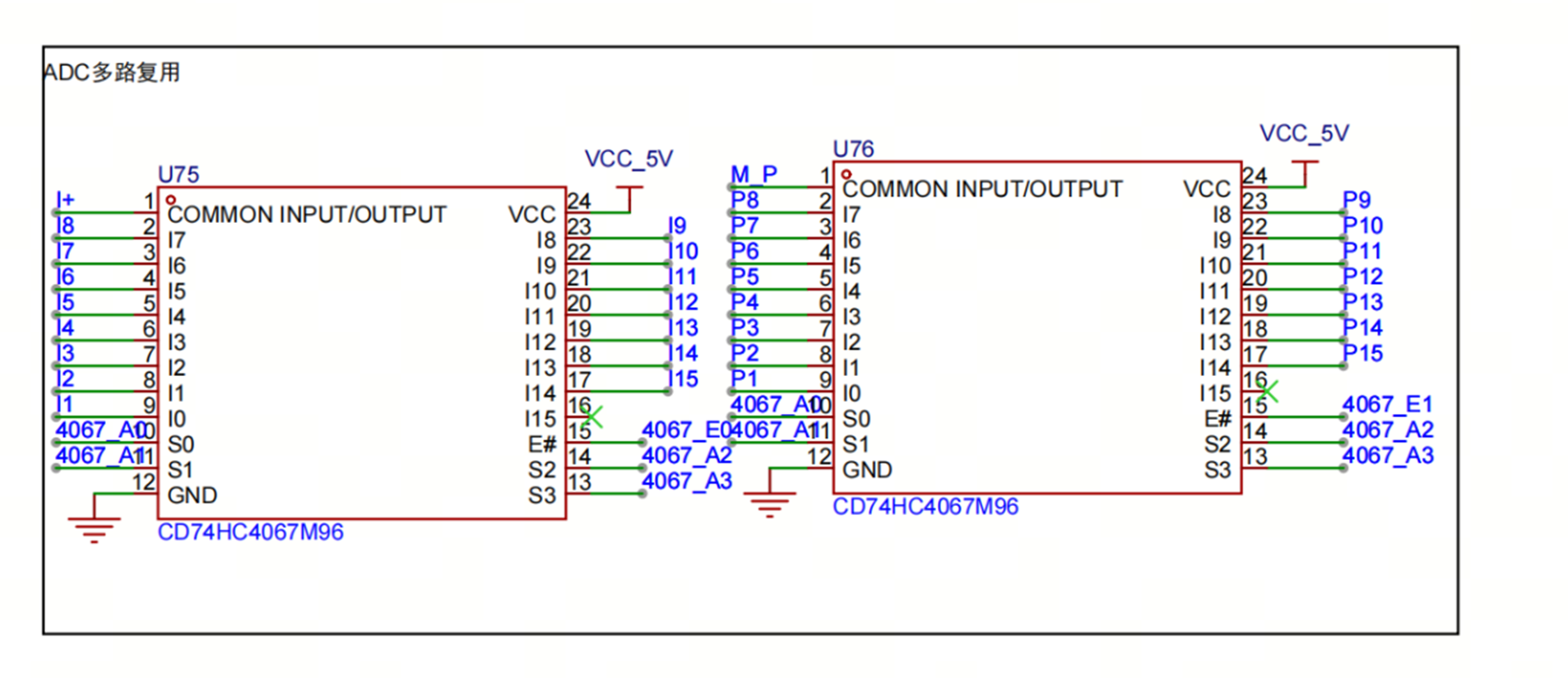
- 其他電路: ADC 多路復用和電流采集幫忙監控每一絲電流;串口隔離保護和 ESP12 通信模塊則保證機器手既能穩穩發話,也能隨時上網“曬曬朋友圈”。
- 軟件設計
- 底層驅動: 在 STM32F4 上配置時鐘、GPIO、DMA、ADC/DAC 及各種接口,就像調校一架精密跑車的每個部件,確保所有傳感器和電機乖乖聽話。
- Linux 環境 & ROS: 選用 Ubuntu 20.04 加持,裝上 ROS Melodic 和 Rviz,這就像給機器手裝上了高科技操作系統,讓它不僅會“動”,還能“看”和“想”。
- 視覺識別: 通過深度學習讓機器手識別各種物體和手勢,簡直是裝了“慧眼”,既能看懂你比劃的手勢,還能不斷自我升級,未來絕對能玩出新花樣!
- 總體論證
- 適應性: 繩驅動設計讓機器手在多自由度動作上游刃有余,無論家里是亂七八糟還是井井有條,都能靈活應對。
- 安全性: 機械和電氣兩手抓,內置緊急停止和過載保護,確保機器手“玩”得開心又安全。
- 可塑性與成本效益: 模塊化設計讓改裝升級輕松搞定,同時優化成本,做到高性能低投入,真是又省錢又省心!
三、硬件部分

- 需求分析
- 多板協同設計:
- 遠端指骨板: 搭載兩個氣壓傳感器,用于檢測壓力變化。
- 中間指骨板: 集成電機驅動及反饋模塊,實現運動傳遞與數據反饋。
- 近端指骨板: 配置激光測距傳感器,輔助檢測距離。
- 手掌核心板: 集成另一套電機驅動、姿態傳感器及 STM32F427VGT6 主控芯片,實現整體協調控制。
- 原理圖分析
- 主控芯片(STM32F427VGT6):
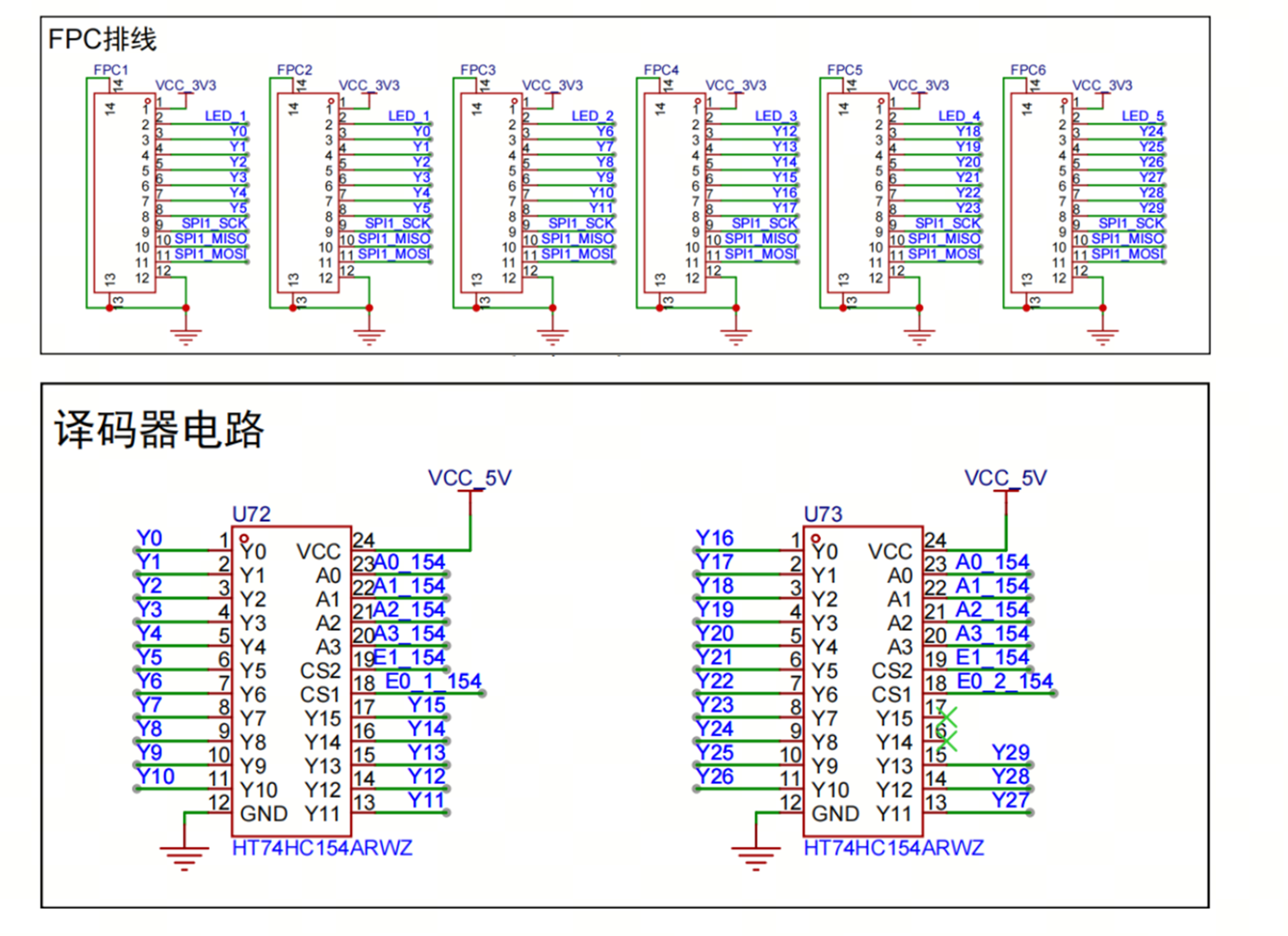
- 譯碼器電路:
- 采用 HT74HC154 系列芯片,通過 4 個 GPIO 控制 16 路輸出,用于管理多個壓力傳感器模塊。

- Type-C 轉串口電路:
- 通過 CH340G 實現 Type-C 接口與串口設備的數據轉換和通信。
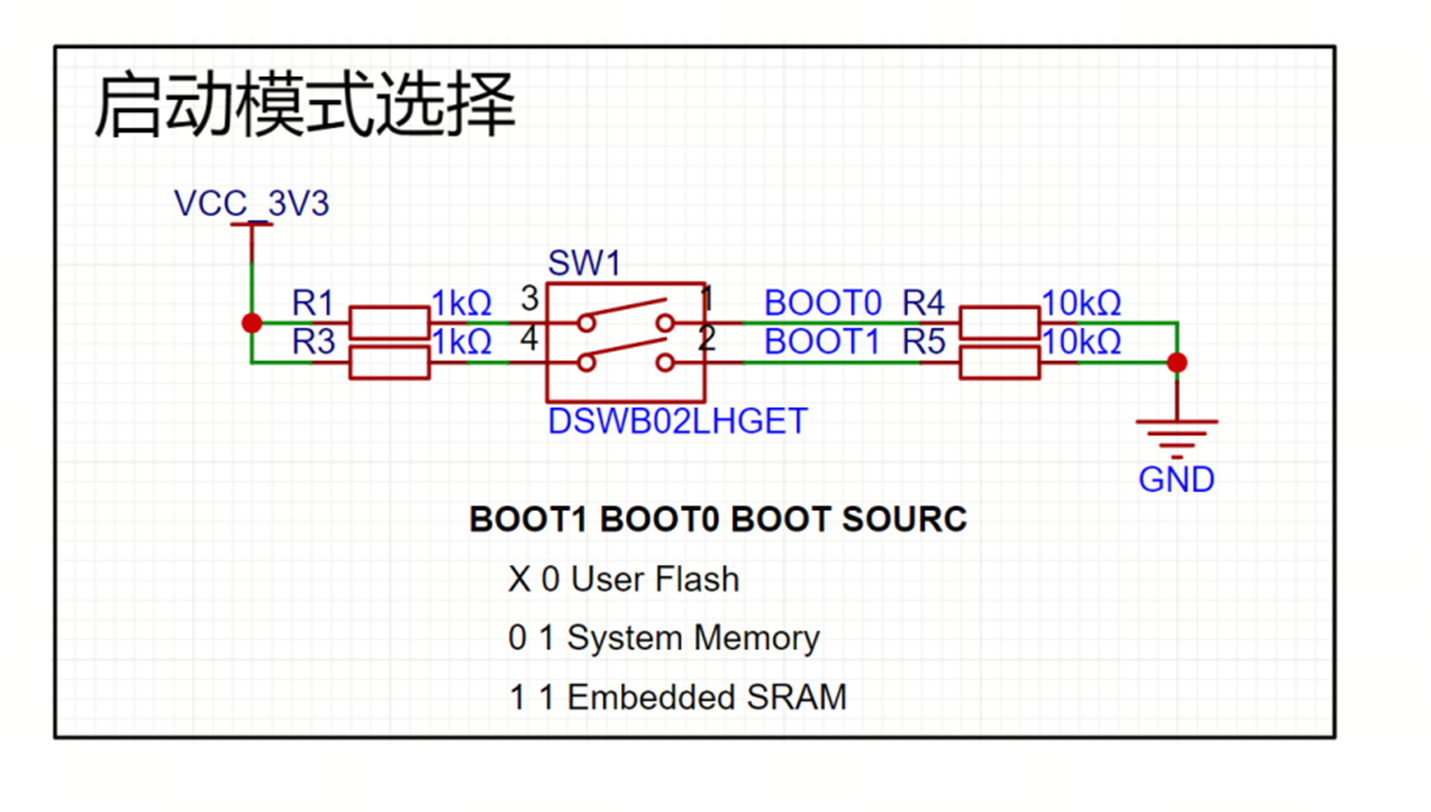
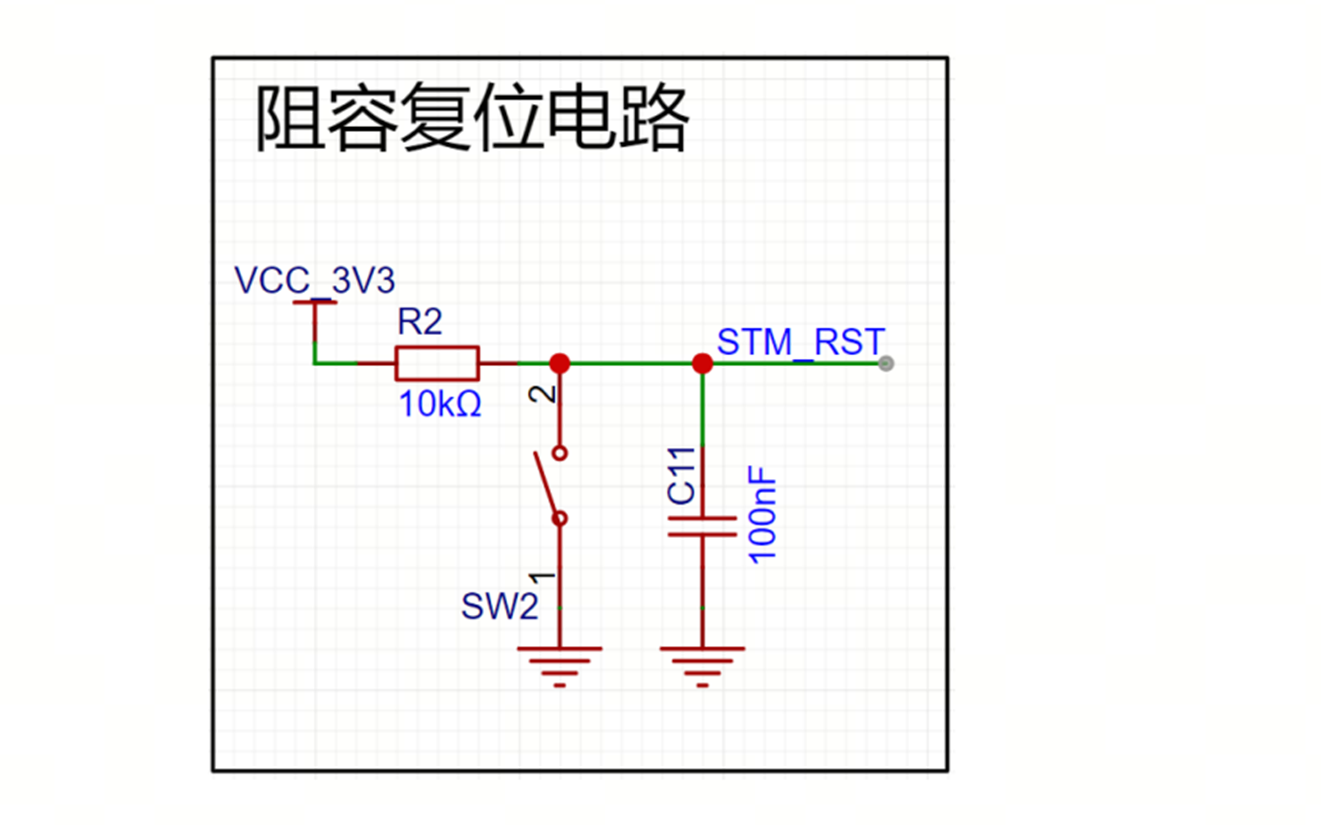
- 啟動模式選擇與復位電路:
- 利用開關和復位按鈕確定 STM32 的啟動模式,并確保系統異常時能正確復位。
- BMP280 傳感器電路:
- 通過 SPI 接口將 BMP280 氣壓傳感器與 STM32F427 連接,實現高精度氣壓和溫度采集。
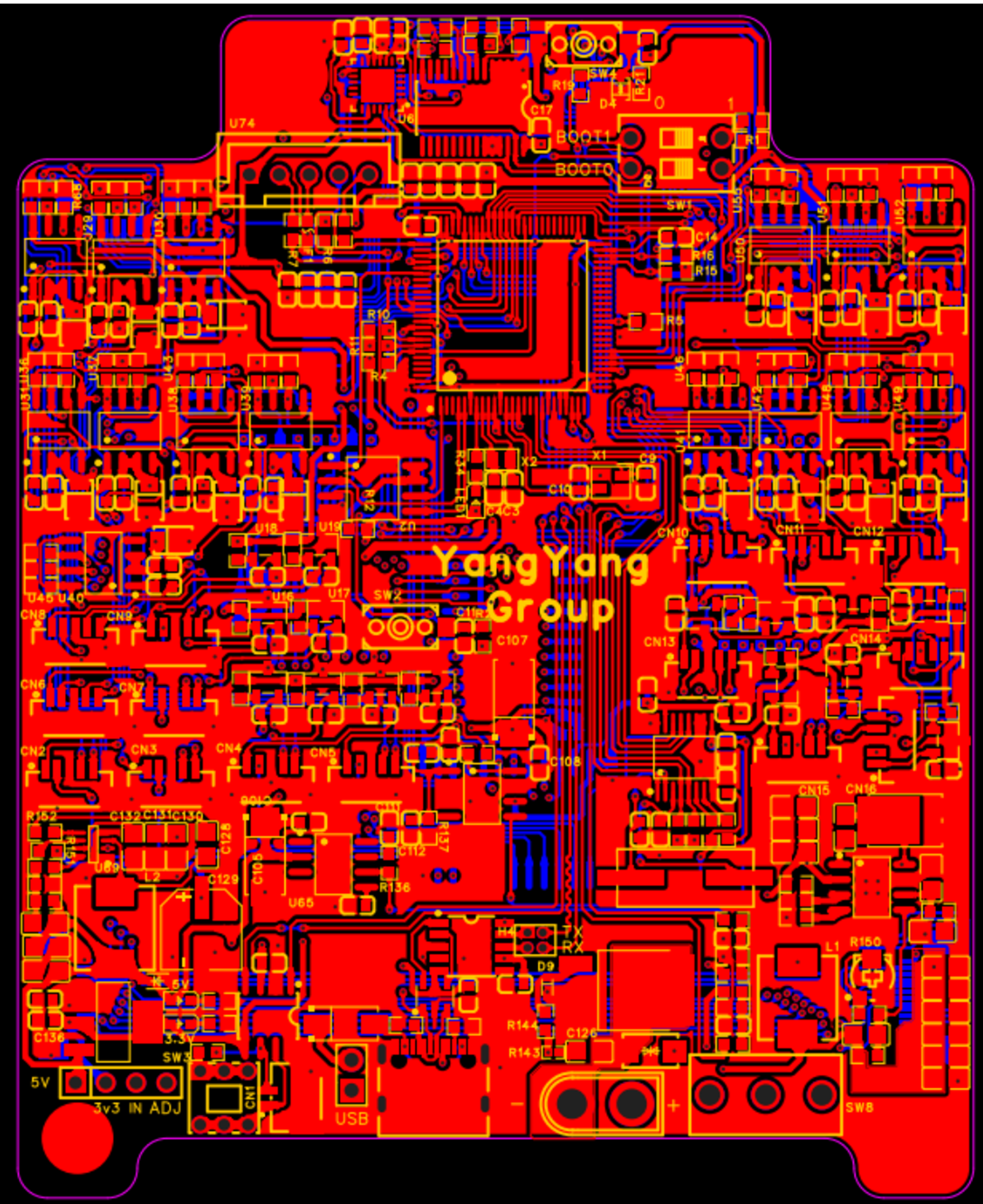
- PCB 分析
- 主控板設計:
- 采用四層 PCB 結構(頂層、GND、VCC、底層),其中接地層與電源層緊密相鄰,確保抗干擾性和穩定性。
- 走線遵循先近后遠、減少直角的原則,并采用差分對等長布線保證高速信號完整性。
- 指尖板設計:
- 集成兩個 BMP280 芯片,結合軟體硅膠的密封與支撐設計,實現對手指壓力的精準檢測。
四、軟件設計與流程
4.1 軟件層次與結構
在軟件的設計方面,主要是三層結構。分別是底層驅動層、Linux 操作系統 層以及 ROS Melodic 層。通過下層為上層提供相應的接口,實現各層級的功能。
4.2 底層驅動設計
4.2.1 BMP280 驅動
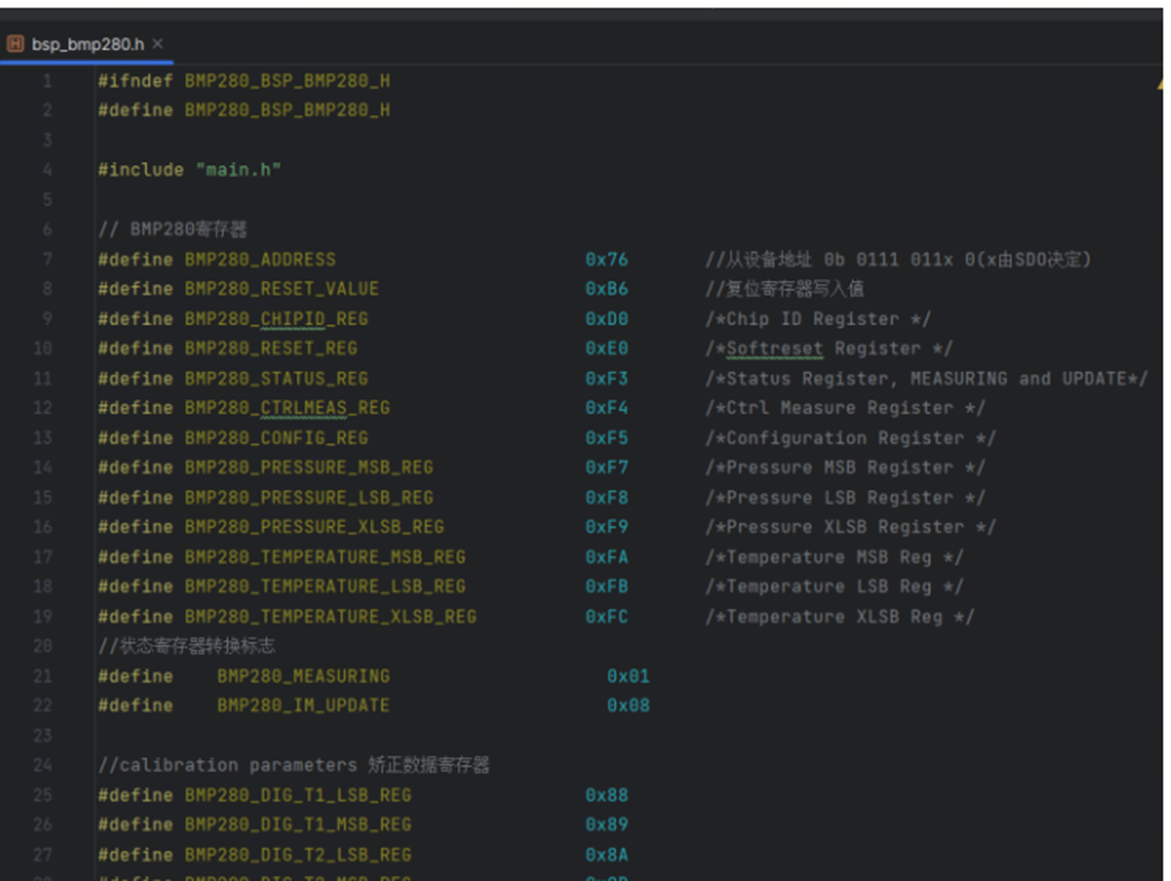
BMP280 驅動程序的作用是將傳感器提供的原始數據進行處理和轉換,得到 實際的溫度和氣壓值。驅動程序負責與硬件進行通信,讀取和寫入寄存器,控制 采樣頻率和濾波器的設置等。在嵌入式系統中,BMP280 驅動程序通常是通過 I2C 或 SPI 接口與微處理器交互的。通過編寫適當的驅動程序,我們可以輕松地使用 BMP280 傳感器獲取環境溫度和氣壓等信息。
4.2.2 空心杯電機驅動
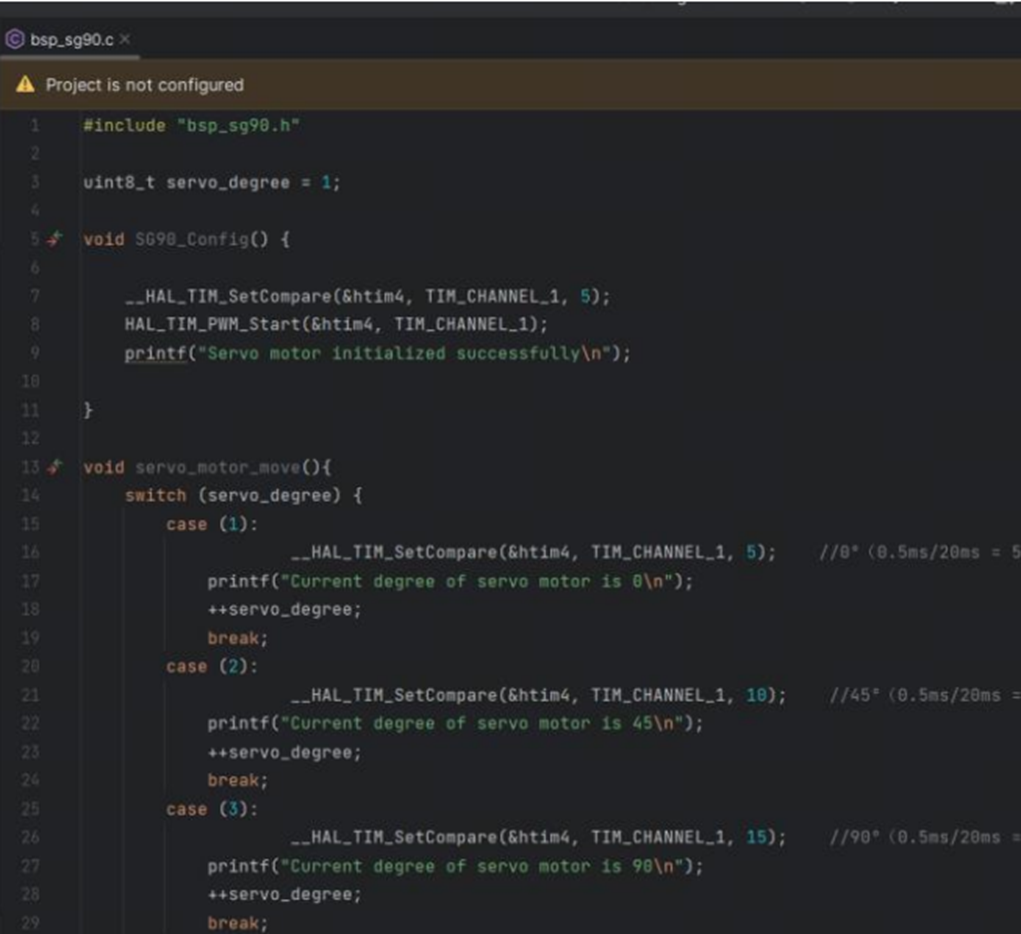
電機驅動程序的作用是控制電機的運動,通過向電機發送電信號來實現電機 的轉動,包括控制電機的轉速、方向、加減速等參數。電機驅動程序通常需要根 據具體的電機類型和電機驅動器的規格進行編寫,以確保電機能夠按照要求進行 運動。在嵌入式系統中,電機驅動程序通常需要與硬件電路結合使用,以實現精 確的控制。常見的電機驅動程序包括步進電機驅動程序、直流電機驅動程序、伺 服電機驅動程序等。
4.3 單片機主程序設計
在本設計中,主函數負責不斷檢測 BMP280 的參數值,解析出指尖的運動情 況。除此之外,程序還要根據用戶定義的指關節位置,檢測并調節電機的轉向。
4.3.1 程序框架設計
單片機主程序采用了事件驅動的架構,包括初始化、主循環、中斷服務例程 等。程序框架設計考慮了實時性能和資源限制。
4.3.2 功能模塊實現
功能模塊實現包括了傳感器數據采集、電機控制、通信協議等。我們使用了 中斷驅動的數據采集方法,確保了數據的實時性和準確性。
4.3.3 調試與優化
調試與優化環節使用了多種工具和技術,如邏輯分析儀和性能分析器。程序 優化著重于減少內存占用和提高執行效率。
4.4 視覺識別系統設計
4.4.1 物體識別算法
物體識別算法采用了基于機器學習和深度學習的方法進行目標檢測,并將算 法部署在 TROS 上,并根據不同的物體采取對其更有效地抓取策略。
4.4.2 手勢識別算法
手勢識別算法結合了圖像處理技術和機器學習,能夠識別不同的手勢命令。 算法設計考慮了復雜環境下的識別準確性和魯棒性
五、測試
5.1系統測試
- 硬件測試
- 對機械結構進行應力、耐久性和精度測試,驗證機械手的穩定性和可靠性。
- 單片機系統測試確保硬件與軟件之間的兼容性和安全性。
- 軟件測試
- 將機器手集成到 ROS 框架中,通過各節點和話題實時接收、處理傳感器數據,驗證系統的多模態感知和控制功能。
5.2功能驗證
- 機械手功能驗證
- 演示基本操作(抓取、按壓、特定手勢如勝利造型),確認動作的精確性和響應性。
- 傳感器性能驗證
- 靈敏度測試: 檢測壓力傳感器線性度,驗證靈敏度大于 5 kPa/N。
- 最小力檢測: 使用 1g 標準砝碼測試,表明傳感器的最小檢測力低于 0.01 N。
- 數據采集及可視化
- 異物深度識別實驗: 通過對嵌入硅膠塊中不同深度異物的按壓,實時記錄傳感器數據。
- 物體識別實驗: 采集不同材質(硅膠、PLA、碳纖維)物體按壓過程中的氣壓變化數據。
- 利用氣壓曲線和散點圖直觀展示訓練集和測試集數據的分布情況。
- 機器學習與神經網絡驗證
- 比較 KNN、GMM 和神經網絡(ResNet)在異物深度檢測和物體識別中的準確率。
- 實驗結果顯示:異物深度檢測準確率約 75%-77%,而物體識別中神經網絡準確率高達約 89.8%。
- 混淆矩陣進一步展示了各算法在分類任務中的效果。
- 視覺識別驗證
- 物體識別: 采用深度學習視覺算法識別目標對象,并規劃相應抓取策略(如蘋果、酸奶抓取示例)。
- 手勢識別: 通過圖像處理和機器學習技術,實現對手勢命令的精準識別,從而控制機器手執行特定動作。
-
高精度
+關注
關注
1文章
554瀏覽量
25665 -
人工智能
+關注
關注
1801文章
48185瀏覽量
242749 -
電路結構
+關注
關注
1文章
38瀏覽量
9088 -
仿生機器人
+關注
關注
1文章
72瀏覽量
15403
發布評論請先 登錄
相關推薦
四足仿生機器人
各種炫酷的仿生機器人
【 平頭哥CB5654語音開發板試用連載】基于外骨骼的仿生機器人控制系統
開源資料六足仿生機器人(原理圖+PCB+源碼等)
仿生機械手一般用什么電機?
如何設計一款基于STM32的仿生機械手
仿生機器人的出現讓人眼前一亮,可你真的了解仿生機器人嗎?
淺談仿生機器人的概念和分類
仿生機器人正在上天下海中大顯神通
基于PIC單片機的仿生機器魚的舵機控制







 工商網監
工商網監

評論