 PCL濾波配準常用的濾波方式
PCL濾波配準常用的濾波方式
最近在看PCL濾波配準等操作,之前在自動駕駛-激光雷達預處理/特征提取和提到了一些濾除點云等操作,但是最近作者發現里面還有一些配準的方法還沒有提到,所以這里重新開個章節來給大家列舉一些常用的濾波方式,方便大家查閱和使用
濾波&聚類
1.1 直通濾波器
void pass_through_filter(const pcl::PointCloud< pcl::PointXYZRGB >::Ptr &input_cloud) //直通濾波器 { std::cout < < "start pass_through_filter" < < std::endl; calc_sight_center(); //計算視點中心,視點中心為濾波器的輸入參數 //
void ex_segmentor::calc_sight_center() // { // double roll, pitch, yaw; //
tf::Quaternion quat_tmp; // tf::quaternionMsgToTF(latest_camera_pos_.pose.pose.orientation, quat_tmp); // tf::Matrix3x3(quat_tmp).getRPY(roll, pitch, yaw); // centerX_ = latest_camera_pos_.pose.pose.position.x + gaze_length_ * cos(yaw); //
centerY_ = latest_camera_pos_.pose.pose.position.y + gaze_length_ * sin(yaw); //
centerZ_ = latest_camera_pos_.pose.pose.position.z - gaze_length_ * sin(pitch); // } //
build the condition pcl::ConditionAnd< pcl::PointXYZRGB >::Ptr range_limit(new pcl::ConditionAnd< pcl::PointXYZRGB >); //構建范圍限制條件
range_limit- >addComparison(pcl::FieldComparison< pcl::PointXYZRGB >::ConstPtr(new pcl::FieldComparison< pcl::PointXYZRGB >("x", pcl::ComparisonOps::GT, centerX_ - 1.5))); // x坐標大于視點中心x坐標-1.5 range_limit- >addComparison(pcl::FieldComparison< pcl::PointXYZRGB >::ConstPtr(new pcl::FieldComparison< pcl::PointXYZRGB >("x", pcl::ComparisonOps::LT, centerX_ + 1.5))); // x坐標小于視點中心x坐標+1.5
range_limit- >addComparison(pcl::FieldComparison< pcl::PointXYZRGB >::ConstPtr(new pcl::FieldComparison< pcl::PointXYZRGB >("y", pcl::ComparisonOps::GT, centerY_ - 1.5))); // y坐標大于視點中心y坐標-1.5
range_limit- >addComparison(pcl::FieldComparison< pcl::PointXYZRGB >::ConstPtr(new pcl::FieldComparison< pcl::PointXYZRGB >("y", pcl::ComparisonOps::LT, centerY_ + 1.5))); // y坐標小于視點中心y坐標+1.5
range_limit- >addComparison(pcl::FieldComparison< pcl::PointXYZRGB >::ConstPtr(new pcl::FieldComparison< pcl::PointXYZRGB >("z", pcl::ComparisonOps::GT, centerZ_ - 1.5))); // z坐標大于視點中心z坐標-1.5
range_limit- >addComparison(pcl::FieldComparison< pcl::PointXYZRGB >::ConstPtr(new pcl::FieldComparison< pcl::PointXYZRGB >("z", pcl::ComparisonOps::LT, centerZ_ + 1.5))); // z坐標小于視點中心z坐標+1.5 //構建濾波器
pcl::ConditionalRemoval< pcl::PointXYZRGB > condrem; //構建濾波器
condrem.setCondition(range_limit); //設置濾波條件
condrem.setInputCloud(input_cloud); //設置輸入點云 //濾波操作
condrem.filter(*input_cloud); }
1.2 離群點濾波器
void statical_outlier_filter(const pcl::PointCloud<PointXYZRGB>::Ptr &input_cloud, int nr_k, double stddev_mult) //濾波器移除離群點 { pcl::StatisticalOutlierRemoval<PointXYZRGB> sorfilter(true); //構建濾波器 sorfilter.setInputCloud(input_cloud); sorfilter.setMeanK(nr_k); //設置在進行統計時考慮的臨近點個數 sorfilter.setStddevMulThresh(stddev_mult); //設置判斷是否為離群點的閥值,用來倍乘標準差,也就是上面的stddev_mult sorfilter.filter(*input_cloud); //濾波結果存儲到cloud_filtered }
1.3 體素化濾波器
void voxel_filter(const pcl::PointCloud< PointXYZRGB >::Ptr &input_cloud, float resolution) //體素化濾波器
{ pcl::VoxelGrid< PointXYZRGB > voxel_grid; //構建體素化濾波器
voxel_grid.setInputCloud(input_cloud); //設置輸入點云
voxel_grid.setLeafSize(resolution, resolution, resolution); //設置體素的大小 voxel_grid.filter(*input_cloud); //濾波結果存儲到cloud_filtered }
1.4 平面點濾除
bool remove_plane(const pcl::PointCloud< PointXYZRGB >::Ptr &input_cloud, const Eigen::Vector3f &axis, double plane_thickness) //移除平面 { pcl::ModelCoefficients::Ptr
coefficients(new pcl::ModelCoefficients); //平面參數矩陣
pcl::PointIndices::Ptr inliers(new pcl::PointIndices); //平面內點索引 // Create the
segmentation object pcl::SACSegmentation< pcl::PointXYZRGB > seg; //構建分割對象
seg.setOptimizeCoefficients(true); //設置是否優化系數
seg.setModelType(pcl::SACMODEL_PERPENDICULAR_PLANE); //設置模型類型為平面
seg.setMethodType(pcl::SAC_RANSAC); //設置分割方法為RANSAC
seg.setMaxIterations(500); //設置最大迭代次數 seg.setAxis(axis); //設置分割軸 seg.setEpsAngle(0.25); //設置角度閾值
seg.setDistanceThreshold(plane_thickness); //設置距離閾值 0.025 0.018
seg.setInputCloud(input_cloud); //設置輸入點云 seg.segment(*inliers,
*coefficients); //分割平面 if (inliers- >indices.size() < 500) { //
ROS_INFO("plane size is not enough large to remove."); return false; }
pcl::ExtractIndices< pcl::PointXYZRGB > extract; extract.setInputCloud(input_cloud); //設置輸入點云 extract.setIndices(inliers); //設置索引,用來濾除 extract.setNegative(true); //設置是否濾除索引內的點 extract.filter(*input_cloud); return true; }
1.5 RGBD顏色特征聚類
void clustoring_with_color(pcl::PointCloud<pcl::PointXYZRGB>::Ptr &input_cloud, std::vector<pcl::PointCloud<PointXYZRGB>::Ptr> &clusters, int min_cluster_size, float distance_th, float color_th, float region_color_th, unsigned int num_nbr) //根據點云的顏色完成聚類 { std::vector<pcl::PointIndices> clusters_indices; //聚類索引 pcl::search::KdTree<pcl::PointXYZRGB>::Ptr kdtree(new pcl::search::KdTree<pcl::PointXYZRGB>); //構建kd樹 kdtree->setInputCloud(input_cloud); //設置輸入點云 // 基于顏色的區域生長聚類對象
pcl::RegionGrowingRGB<pcl::PointXYZRGB> clustering; clustering.setInputCloud(input_cloud); clustering.setSearchMethod(kdtree); //設置搜索方法 // 這里,最小簇大小也會影響后處理步驟: 小于這個值的clusters_indices將與鄰點合并。
clustering.setMinClusterSize(min_cluster_size); //設置最小簇大小 // 設置距離閾值,以知道哪些點將被視為,鄰點 clustering.setDistanceThreshold(distance_th); // 1 // 顏色閾值,用于比較兩個點的RGB顏色 clustering.setPointColorThreshold(color_th); // 9 6.5 25.0f 18.0f // 后處理步驟的區域顏色閾值:顏色在閾值內的clusters_indices將合并為一個。
clustering.setRegionColorThreshold(region_color_th); // 2 //區域耦合時檢查的附近的數量。默認為100, 在不影響結果的范圍內適度設定小范圍。
clustering.setNumberOfRegionNeighbours(num_nbr); //設置近鄰數量 //
clustering.setSmoothModeFlag(true); // clustering.setSmoothnessThreshold(0.95);
clustering.extract(clusters_indices); //提取聚類索引 for (std::vector<pcl::PointIndices>::const_iterator i = clusters_indices.begin(); i !=
clusters_indices.end(); ++i)//遍歷聚類索引 {
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cluster(new
pcl::PointCloud<pcl::PointXYZRGB>); //構建聚類點云 for
(std::vector<int>::const_iterator pit = i->indices.begin(); pit != i->indices.end(); ++pit) //遍歷聚類索引中的點索引 { cluster->points.push_back(input_cloud->points[*pit]); //將點添加到聚類點云 } cluster->width = cluster->points.size(); cluster->height = 1; cluster->is_dense = true; clusters.push_back(cluster); //將聚類點云添加到聚類點云集合中 } }
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
plc
+關注
關注
5016文章
13376瀏覽量
464710 -
濾波
+關注
關注
10文章
669瀏覽量
56722 -
點云
+關注
關注
0文章
58瀏覽量
3806
發布評論請先 登錄
相關推薦
matlab 圖像配準問題,有代碼,配準區域是綠色的,想要的是灰度圖像的配準區域,求助大神?
','joint');title('配準完成');set(gca,'units','pixels','Visible','off');frame=getframe;im1=frame2im(frame
發表于 03-21 16:49
大容量有源濾波與無功補償方式研究
對于大容量諧波與無功功率補償,提出了采用混合型有源電力濾波器以及混合型濾波器與無源濾波器并聯補償的方式,分析了并聯運行時混合型濾波器與無源
發表于 04-06 14:06
?19次下載
SAR圖像自動配準性能分析
合成孔徑雷達(SAR)圖像的自動配準長期以來都未能很好的解決,特別是高分辨率SAR圖像其配準的關鍵是穩健的特征提取與特征匹配算法。在光學圖像配
發表于 04-28 15:04
?26次下載
基于SIFT特征的圖像配準(圖像匹配)
SIFT圖像處理代碼,必須和三個文件一起下載使用:基于SIFT特征的圖像配準(Matlab源代碼)、基于SIFT特征的圖像配準(仿真圖片)。
發表于 08-06 08:00
?3次下載
基于SIFT特征的圖像配準(仿真圖片)
SIFT圖像處理代碼,必須和三個文件一起下載使用:基于SIFT特征的圖像配準(Matlab源代碼)、基于SIFT特征的圖像配準(圖像匹配)。
發表于 08-06 08:00
?3次下載
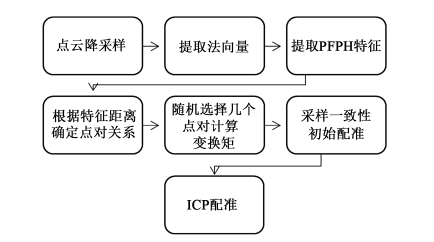
使用PCL進行點云數據粗配準算法的研究資料分析
傳統ICP算法精度受點云初始位姿影響較大,收斂速度慢,不能滿足精細化點云建模的要求。基于此問題,通過基于快速點特征直方圖的采樣一致性配準方法進行粗配準。首先將兩幀待
發表于 03-01 09:34
?14次下載
電感濾波常用的三種方式
電感濾波常用的方式如下:1、L型濾波其原理就是輸入端串入一個電感,電感濾除高頻信號效果最明顯,主要是利用電感中的電流不能突變的原理,當電感中的電流增大時,將其存儲于電感當中使電流緩慢增
常用的ADC濾波算法有哪些
ADC(模數轉換器)濾波算法在信號處理中起著至關重要的作用,它們能夠幫助我們提取出有用的信號,同時濾除噪聲和干擾。以下是常用的ADC濾波算法詳解,這些算法各具特色,適用于不同的應用場景。





 工商網監
工商網監
評論