 基于XCZU3EG/XCZU4EV/XCZU5EV核心板的無人機視覺跟蹤系統解決方案
基于XCZU3EG/XCZU4EV/XCZU5EV核心板的無人機視覺跟蹤系統解決方案
在農業生產領域,無人機視覺追蹤系統運用在識別農作物的生長情況中,進行高空灌溉、驅趕害蟲等自動化農業管理;在民用領域,無人機通常使用視覺跟蹤系統識別人體手勢,讓用戶通過手勢操控無人機的升降和擺動;在生物調研領域,該技術更多是為了追蹤記錄野生瀕危動物的生活習慣,維護生態系統平衡。
無人機跟蹤系統是如何組成的呢?首先,無人機通過高清攝像頭模塊,實時采集圖像數據,系統通過信號檢測模塊和圖像預處理模塊將圖片信息轉變成數字信息,然后通過數據采集與處理模塊進行采樣、量化,并對各圖片參數進行分析過濾;將分析結果與設定的跟蹤目標比較,進行圖像識別跟蹤;跟蹤的圖像信息可以通過網絡傳輸到手機和電腦實時顯示。
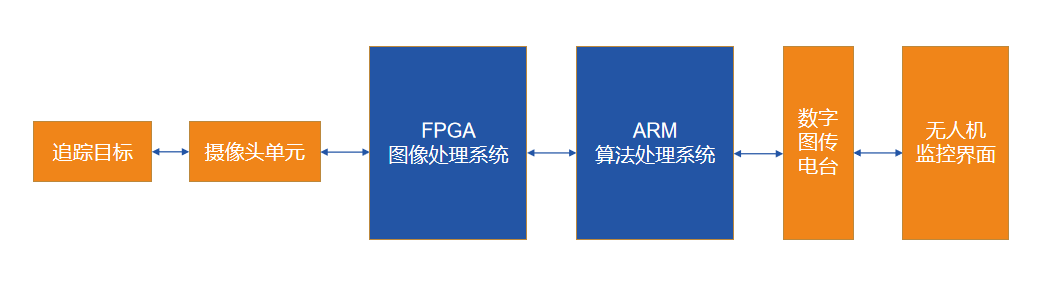
無人機視覺跟蹤流程圖
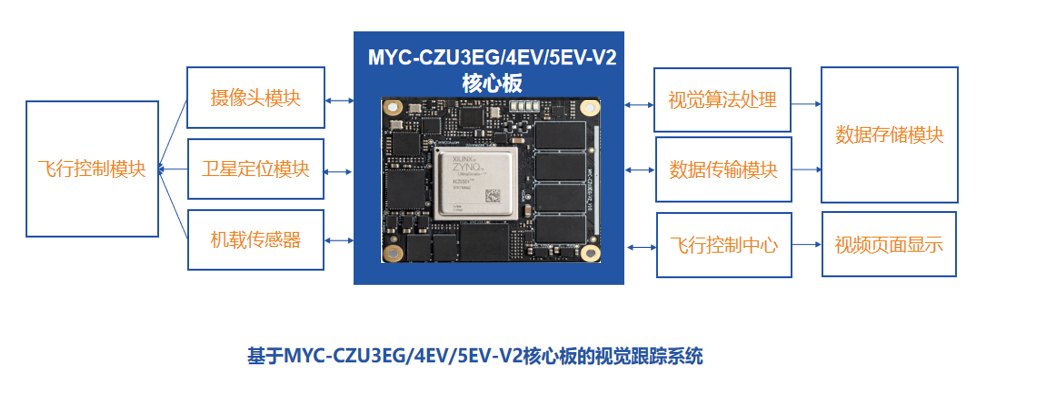
基于米爾電子MYC-CZU4EV/5EV-V2核心板設計的無人機視覺跟蹤系統,可以分為圖像信號采集、數據處理、信息展示三部分;圖像采集主要通過攝像頭收集圖像信息,再由FPGA芯片高速采集將圖片信息傳輸到數據處理單元,數據處理單元由VCU和MCU組成,負責將采集的圖像數據通過算法把設定好的跟蹤目標進行標注處理;而信息展示部分,則通過無線傳輸系統把信息同步顯示到無人機控制平臺和APP上面,實現實時視頻傳輸,掌握遠程定位追蹤功能。
MYC-CZU3EG/4EV/5EV-V2核心板,搭載功能全面的高規格Zynq UltraScale+ MPSoC芯片,其中芯片的PS端集成了APU ARM Cortex?-A53處理器,RPU Cortex-R5處理器,頻率高達667MHz的Arm Mali-400 MP2(GPU)。需要注意的是,4EV/5EV芯片比3EG芯片多了一個視頻編解碼器單元 (VCU),支持H.264/H.265編解碼。芯片搭載內部存儲器,外部存儲器接口(DDR)和外設接口。這些外設接口主要包括USB總線接口,以太網接口,SD/eMMC接口,I2C總線接口,CAN總線接口,UART接口,GPIO等。高速接口如 PCIE,SATA,Display Port。
核心板圖片:

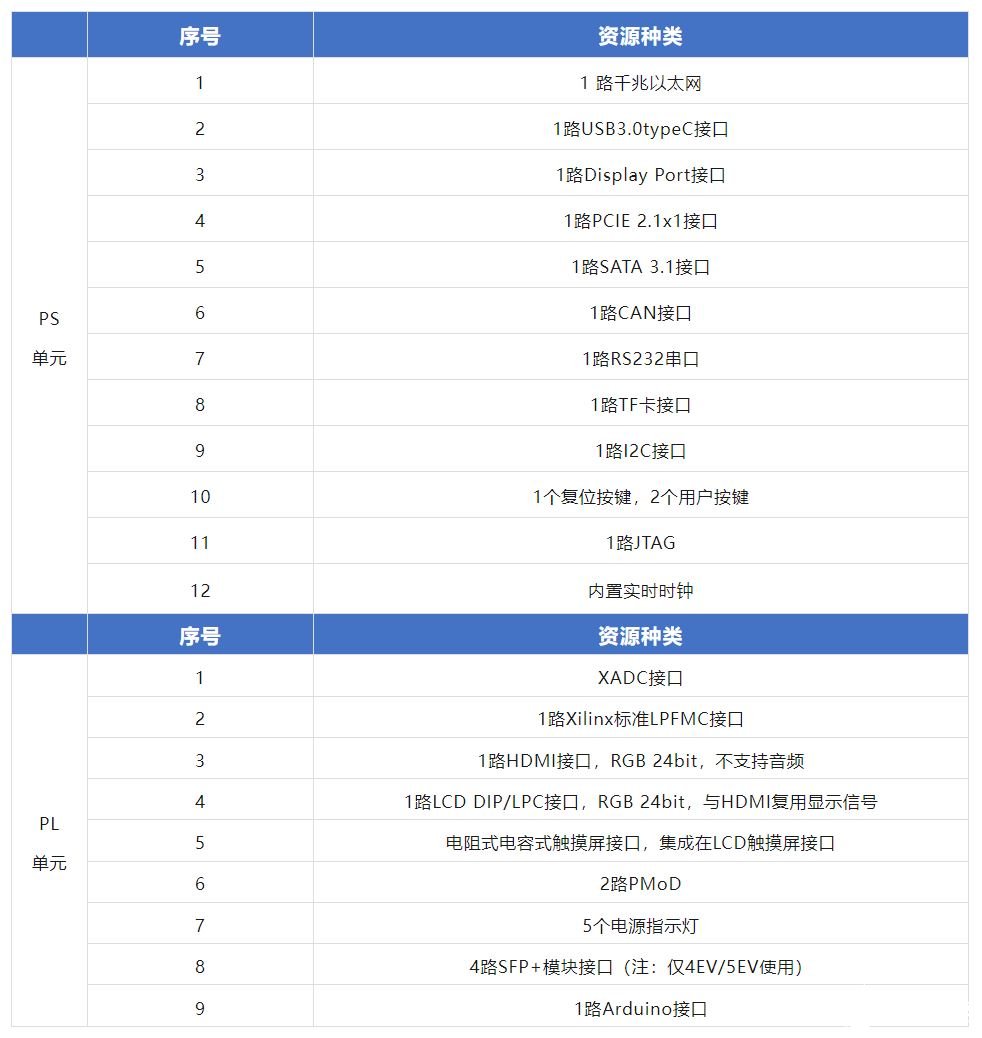
板卡資料:
機械參數

底板資源
本文轉載自:米爾MYiR微信公眾號
審核編輯:湯梓紅
-
攝像頭
+關注
關注
60文章
4860瀏覽量
96071 -
無人機
+關注
關注
230文章
10510瀏覽量
181644 -
跟蹤系統
+關注
關注
0文章
86瀏覽量
18653 -
核心板
+關注
關注
5文章
1028瀏覽量
29859
發布評論請先 登錄
相關推薦
XCZU15EG板卡設計原理圖:基于 XCZU15EG的雙 FMC通用信號處理板
請問有XCZU9CG-FFVC900的原理圖庫嗎?
將pkg文件與ibis文件集成到XCZU3EGS-FVA625時出現問題
米爾MYD-CZU3EG搭載Xilinx DPU,具備強大AI計算能力,你怎么看米爾這款產品?
XCZU15EG板卡學習資料第524篇:基于XCZU15EG的FMC+ 高性能通用信號處理板卡
XCZU4EG-L2FBVB900E系統SOC芯片
XCZU7EG-1FBVB900I系統SOC芯片
XCZU19EG-L2FFVD1760E系統SOC芯片
米爾發布新品Zynq UltraScale+ MPSoC核心板
MPSOC開發板教程之HELLO WORLD

XCZU3EG開發筆記之gpio_emio?
無人機視覺跟蹤系統解決方案-米爾基于XCZU3EG/XCZU4EV/XCZU5EV核心板

XCZU15EG設計原理圖:523(ZCU102E的pin兼容替代卡) 基于 XCZU15EG的雙 FMC通用信號處理板
基于6U VPX XCVU9P+XCZU7EV的雙FMC信號處理板卡
高速圖像處理卡設計原理圖:527-基于3U VPX XCZU15EG+TMS320C6678的信號處理板





 工商網監
工商網監
評論