如圖1為一采用PLC的直接數(shù)字控制系統(tǒng)。來自物理傳感器的連續(xù)信號被轉(zhuǎn)換為數(shù)字采樣信號后,PLC控制系統(tǒng)就可以運(yùn)行諸如比例,積分,微分(PID)等算法產(chǎn)生控制信號輸出,最終實(shí)現(xiàn)對裝置位置的控制。在圖1中,IEC61131-3軟件假設(shè),來自傳感器或變送器
2021-01-20 10:19:55 3245
3245 PLC與伺服驅(qū)動(dòng)器的編程接線方法。伺服控制系統(tǒng)的使用方法其實(shí)跟變頻器類似,它的作用類似于變頻器應(yīng)用于普通的交流馬達(dá),也是屬于PLC伺服控制系統(tǒng)的一部分,主要應(yīng)用于高精度的定位系統(tǒng),在這里需要注意的是伺服驅(qū)動(dòng)器方面如何去正確接線。
2022-10-21 09:14:333006 FX3G · FX3U · FX3GC · FX3UC可編程控制器可以向伺服電機(jī)、 步進(jìn)電機(jī)等輸出脈沖信號, 從而進(jìn)行定位控制。脈沖頻率高的時(shí)候, 電機(jī)轉(zhuǎn)得快;脈沖數(shù)多的時(shí)候, 電機(jī)轉(zhuǎn)得多。
2022-11-21 11:47:411366 在自動(dòng)化項(xiàng)目開發(fā)的過程中,進(jìn)行一些高精度的定位控制。選用伺服電機(jī)作為執(zhí)行器件可快速實(shí)現(xiàn)高精度控制系統(tǒng)的構(gòu)建。
2023-03-02 14:23:273983 
以三菱PLC控制伺服馬達(dá)為例,具體分享一下伺服馬達(dá)控制步驟。
2023-04-11 09:08:382788 1200PLC控制伺服電機(jī)沒有原點(diǎn)傳感器可以回零嗎?
2023-03-30 16:40:53
和實(shí)踐終于開發(fā)了一個(gè)FB塊,一個(gè)塊就可以實(shí)現(xiàn)伺服的上電,使能,相對定位,絕對定位,JOG運(yùn)行,回原控制(包括碰到極限反找原位功能),以及故障清除和伺服狀態(tài)顯示等功能。該塊核心是將西門子庫函數(shù)...
2021-07-05 06:26:57
51單片機(jī)就可以控制人機(jī)界面了---實(shí)現(xiàn)儀表盤采用了TFT80480RS050BN彩色液晶屏模塊。
2013-11-20 19:51:26
為什么PLC可以取代傳統(tǒng)的繼電器+接觸器控制呢?PLC到底是怎么替代傳統(tǒng)的繼電器控制和接觸器控制系統(tǒng)的?
2021-08-27 08:00:31
的個(gè)數(shù)來確定轉(zhuǎn)動(dòng)的角度,也有些伺服可以通過通訊方式直接對速度和位移進(jìn)行賦值。 由于位置模式可以對速度和位置都有很嚴(yán)格的控制,所以一般應(yīng)用于定位裝置。 3、速度模式 通過模擬量的輸入或脈沖的頻率都可以進(jìn)行
2019-10-27 08:00:00
PLC控制伺服的原理是什么?PLC控制伺服的模式有哪幾種?
2021-10-11 08:45:46
PLC是如何控制伺服電機(jī):通過發(fā)送的脈沖
2021-02-04 06:04:22
(一)PLC是怎么控制伺服電機(jī)的?在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對伺服電機(jī)的位置控制。其實(shí),伺服
2021-09-06 06:00:20
PLC步進(jìn)電機(jī)指令可以控制伺服電機(jī)么? 也就是步進(jìn)電機(jī)指令和伺服電機(jī)指令有區(qū)別嗎?
2023-03-30 17:34:11
PLC步進(jìn)電機(jī)指令可以控制伺服電機(jī)么? 也就是步進(jìn)電機(jī)指令和伺服電機(jī)指令有區(qū)別嗎?
2023-03-30 17:34:10
PLC的PID控制怎么實(shí)現(xiàn)閉環(huán)控制?在程序中采用PID調(diào)節(jié)指令就可以了嗎,是不是伺服電機(jī)走長了,可用PID調(diào)整那這輸入誤差怎么得到?比如說輸出與輸入誤差積分成正比,是不是如果有誤差,PLC就會算出這個(gè)值,然后在輸出值上面加上去或減掉???
2023-03-30 17:18:02
plc控制伺服電機(jī)的下位機(jī)系統(tǒng)有什么程序?伺服電機(jī)的控制方式包括哪幾種?plc控制伺服電機(jī)的上位機(jī)系統(tǒng)有什么功能?
2021-06-28 07:14:41
項(xiàng)目說明: 伺服電機(jī)的已經(jīng)深入到工業(yè)的各個(gè)角落,可以說隨處可見他的影子。但是對伺服電機(jī)的控制,目前比較流行的是電腦上位機(jī),或者是PLC通過對運(yùn)動(dòng)控制卡的控制
2013-11-11 18:25:44
伺服驅(qū)動(dòng)器按照其控制對象由外到內(nèi)分為位置環(huán)、速度環(huán)和電流環(huán),相應(yīng)伺服驅(qū)動(dòng)器也就可以工作在位置控制模式、速度控制模式和力矩控制模式。
2019-11-05 09:01:59
您好! 我有兩個(gè)問題。我最近需要從外部通過FPGA控制AD9912評估板,是不是只需要將板子上的外接口接到FPGA的輸出就可以,有沒有其他需要注意的?第二 就是如果我們用的是外部參考信號的話,需要
2018-09-17 11:09:45
為什么用PLC控制伺服控制器一給使能電機(jī)就轉(zhuǎn)(此時(shí)PLC還沒運(yùn)行呢),控制器和電機(jī)都已經(jīng)測試好了
2023-12-11 07:00:33
USS是什么意思?USS通信與串口通信區(qū)別在什么地方?運(yùn)動(dòng)控制器PLC的結(jié)構(gòu)是如何構(gòu)成的?什么是伺服驅(qū)動(dòng)器 ?
2021-06-28 08:03:17
什么是定位控制?定位控制系統(tǒng)由哪幾部分組成?三菱PLC定位控制功能有什么?什么是編碼器?有哪些類型?
2021-10-09 07:32:59
在s7-200+smart+plc伺服控制系統(tǒng)中高速脈沖輸出口可以任選擇對嗎?
2023-03-30 13:59:09
、脈沖輸出步進(jìn)電機(jī)控制、輸入信號計(jì)數(shù)控制、程序行計(jì)數(shù)控制等通用的控制功能。還具有停止、單步、手動(dòng)和暫停等專用的控制功能,簡單易用。表格設(shè)置:通過簡單的表格設(shè)置操作,即可快速實(shí)現(xiàn)所需應(yīng)用功能,達(dá)到程序控制
2016-12-21 11:17:45
如何實(shí)現(xiàn)通過網(wǎng)線就可以進(jìn)行文件的傳輸以及控制臺控制?
2021-10-25 07:05:26
伺服電機(jī)驅(qū)動(dòng)器的作用是什么?如何實(shí)現(xiàn)高精度且高定位來控制伺服電機(jī)?
2021-10-12 13:01:01
verilog是如何實(shí)現(xiàn)伺服電機(jī)控制的?
2021-09-24 12:29:32
伺服驅(qū)動(dòng)器和伺服電機(jī)的接線方法是什么?伺服驅(qū)動(dòng)器如何進(jìn)行參數(shù)配置?如何通過PLC控制伺服電機(jī)的正反轉(zhuǎn)及定長控制?
2021-09-29 08:38:16
電腦2路電源控制,再增加2路控制是不是在原來板上再加2個(gè)繼電器和2個(gè)電容就可以了?電腳控制模塊用換嗎?
2017-12-25 08:26:49
該FB塊一個(gè)塊就可以實(shí)現(xiàn)伺服的上電,使能,相對定位,絕對定位,JOG運(yùn)行,回原控制(包括碰到極限反找原位功能),以及故障清除和伺服狀態(tài)顯示等功能。該塊核心是將西門子庫motion Control中
2021-06-28 06:21:17
請問PLC是怎么控制伺服電機(jī)的?
2021-09-26 06:04:03
請教一個(gè)問題,近段時(shí)間在網(wǎng)上看到了有賣無線WiFi智能插座的,WiFi智能插座可以連接家里的無線路由器,然后給手機(jī)安裝APP,只要在有網(wǎng)絡(luò)的地方就可以實(shí)現(xiàn)遠(yuǎn)程控制WiFi插座。現(xiàn)在想咨詢貴公司的串口WiFi模塊能否實(shí)現(xiàn)同樣的功能,如何實(shí)現(xiàn)?
2019-01-15 06:35:45
詳述了用PLC的高速計(jì)數(shù)和高速脈沖輸出指令PTO/PWM基本指令實(shí)現(xiàn)自動(dòng)運(yùn)動(dòng)定位的控制。系統(tǒng)采用PLC的PTO輸出直接驅(qū)動(dòng)步進(jìn)電機(jī)驅(qū)動(dòng)器、增量型旋轉(zhuǎn)編碼器和導(dǎo)螺桿機(jī)構(gòu)形成閉環(huán)控制系
2010-02-11 14:37:20 104
104 一般定位上的伺服系統(tǒng)之伺服馬達(dá)控制方式可分為扭矩控制(Toque Control)及速度控制(Velocity Control)兩類,這兩種控制方式都需要控制器和驅(qū)動(dòng)器一起配合才有辦法動(dòng)作,扭矩控制定位時(shí),
2010-07-08 12:10:1132 詳述了用PLC的高速計(jì)數(shù)和高速脈沖輸出指令PTO/PWM基本指令實(shí)現(xiàn)自動(dòng)運(yùn)動(dòng)定位的控制。系統(tǒng)采用PLC的PTO輸出直接驅(qū)動(dòng)步進(jìn)電機(jī)驅(qū)動(dòng)器、增量型旋轉(zhuǎn)編碼器和導(dǎo)螺桿機(jī)構(gòu)形成閉環(huán)控制系
2010-07-13 16:10:3738 本文介紹一個(gè)高性價(jià)比的,應(yīng)用臺達(dá)plc的高速計(jì)數(shù)器和與變頻器通訊的功能來實(shí)現(xiàn)的定位控制的例子。
2011-06-17 09:59:4410634 
本文旨在闡述利用PLC控制伺服電機(jī)實(shí)現(xiàn)準(zhǔn)確定位的方法,介紹控制系統(tǒng)在設(shè)計(jì)與實(shí)施中需要認(rèn)識與解決的若干問題,給出了控制系統(tǒng)參考方案及軟硬件結(jié)構(gòu)的設(shè)計(jì)思路,對于工業(yè)生產(chǎn)中
2011-07-12 11:05:3692890 
為了在一定場合取代高成本的定位控制,實(shí)現(xiàn)準(zhǔn)確定位控制系統(tǒng)最優(yōu)的性價(jià)比,采用SIEMENS公司S7-200系列PLC作為控制器,控制三相交流異步電動(dòng)機(jī)和步進(jìn)電機(jī)運(yùn)行以實(shí)現(xiàn)準(zhǔn)確定位。
2011-07-13 09:44:198267 
PLC控制伺服電機(jī)應(yīng)用實(shí)例。
介紹PLC如何控制伺服電機(jī)應(yīng)用的實(shí)例。
2016-05-05 11:37:3962 伺服電機(jī)控制PLC程序
2016-12-17 16:18:379 本文介紹了利用A9系列伺服中伺服PLC引擎實(shí)現(xiàn)多達(dá)32段位置定位功能,對伺服控制具有一定的參考價(jià)值。
2017-09-25 15:05:4910 FXas .FX3G .FX3cc .FX3u .FX3UC 可編程控制器可以向伺服電機(jī)、步進(jìn)電機(jī)等輸出脈沖信號,從而進(jìn)行定位控制。脈沖頻率高的時(shí)候,電機(jī)轉(zhuǎn)得快; 脈沖數(shù)多的時(shí)候,電機(jī)轉(zhuǎn)得多。用脈沖
2017-10-24 16:59:0333 由PLC與伺服電機(jī)組成一個(gè)系統(tǒng),通過PLC控制伺服電機(jī),實(shí)現(xiàn)機(jī)構(gòu)的原點(diǎn)回歸、相對定位和絕對定位功能
2017-11-13 06:01:0032048 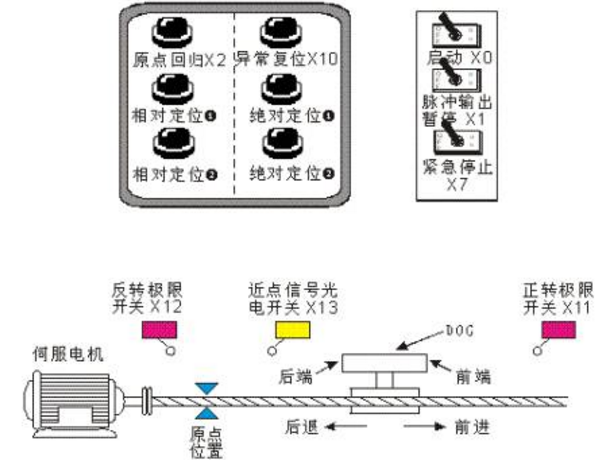
臺達(dá)伺服定位控制案例臺達(dá)伺服定位控制案例臺達(dá)伺服定位控制案例
2018-01-03 15:46:4126 伺服定位控制可以在PLC中實(shí)現(xiàn),也可以在伺服控制器中實(shí)現(xiàn)。用PLC實(shí)現(xiàn),可選用317-T的工藝型CPU,內(nèi)置定位控制功能。PLC通過通訊向伺服發(fā)送速度指令,并將伺服的反饋取到PLC中,在PLC中實(shí)現(xiàn)
2018-02-01 15:17:0410170 本文詳細(xì)介紹了實(shí)現(xiàn)永宏PLC接伺服控制,希望對機(jī)電控制的工程師有所幫助。
2018-02-26 19:39:485201 PLC控制伺服電機(jī)學(xué)習(xí)資料
2018-04-02 16:17:2254 本文主要詳解PLC控制伺服系統(tǒng)步驟,首先介紹了PLC工作原理以及PLC控制伺服電機(jī)3種方式,其次闡述了西門子PLC控制的伺服控制系統(tǒng),具體的跟隨小編一起來了解一下。
2018-06-01 10:46:1250851 速時(shí)間,以及需要知道伺服驅(qū)動(dòng)器什么時(shí)候定位完成,是否碰到限位等等。無論哪種PLC,無非就是對這幾個(gè)物理量的控制和運(yùn)動(dòng)參數(shù)的讀取,只是不同PLC實(shí)現(xiàn)方法不一樣。
2018-06-27 09:36:4918590 伺服電機(jī)最主要的應(yīng)用還是定位控制,位置控制有兩個(gè)物理量需要控制,那就是速度和位置,確切的說,就是控制伺服電機(jī)以多快的速度到達(dá)什么地方,并準(zhǔn)確的停下。
2018-07-23 14:55:001782 本文介紹一套用于軋線 PLC 控制的模擬量信號采樣、濾波的方法。實(shí)現(xiàn)了自由靈活的信號處理。信號穩(wěn)定性、可靠性均較濾波前有較大的改善。在軋線張力控制環(huán)節(jié)中濾波效果顯著,滿足了生產(chǎn)的要求。此功能經(jīng)模塊化編程后,可方便的用于負(fù)荷采集、溫度監(jiān)控等PLC 監(jiān)控領(lǐng)域。
2018-09-07 09:06:003433 
本系統(tǒng)用工控機(jī)通過MODBUS RTU協(xié)議分別跟Kinco PLC和臺安變頻器通訊,Kinco PLC則通過CAN總線控制Kinco伺服。該系統(tǒng)利用CAN總線的高通訊速率,從而可以快速地控制多臺伺服的聯(lián)動(dòng),達(dá)到了系統(tǒng)快速性的要求。系統(tǒng)控制方框圖如圖3所示:
2020-04-04 11:04:001814 
目前伺服控制器的設(shè)計(jì)多以DSP或MCU為控制核心,伺服控制器是用來控制伺服馬達(dá)的一種器件,一般是通過位置、速度和力矩三種方式對伺服馬達(dá)進(jìn)行控制,實(shí)現(xiàn)高精度的傳動(dòng)系統(tǒng)定位。 從結(jié)構(gòu)上看,伺服控制器和變頻器差不多,但對元器件的要求精度和可靠性更高。
2018-10-07 11:41:413897 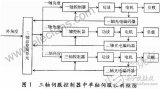
V90伺服可實(shí)現(xiàn)內(nèi)部位置控制,但使用PLC的I/O口控制接線及應(yīng)用相對比較復(fù)雜,V90集成了Modbus和USS通信,可以利用通信控制伺服實(shí)現(xiàn)內(nèi)部位置控制和速度控制,只需要一根通信電纜即可實(shí)現(xiàn)控制大為的簡化了接線。
2018-12-17 10:11:3312008 
速度控制一般都是有變頻器實(shí)現(xiàn),用伺服電機(jī)做速度控制,一般是用于快速加減速或是速度精準(zhǔn)控制的場合,因?yàn)橄鄬τ谧冾l器,伺服電機(jī)可以在幾毫米內(nèi)達(dá)到幾千轉(zhuǎn),由于伺服都是閉環(huán)的,速度非常穩(wěn)定。
2018-12-26 17:33:357587 通過PLC給伺服驅(qū)動(dòng)器發(fā)驅(qū)動(dòng)脈沖,通過改變脈沖頻率來控制移動(dòng)速度,通過改變脈沖數(shù)量來改變移動(dòng)量,控制步進(jìn)電機(jī)移動(dòng)方向。
伺服驅(qū)動(dòng)器是執(zhí)行機(jī)構(gòu),在接收到PLC發(fā)來的信號,控制電機(jī)來運(yùn)動(dòng),通過位置編碼器精準(zhǔn)定位。
2019-06-30 10:15:3639615 
plc控制伺服,如何實(shí)現(xiàn)暫停功能,基本可以從硬件和軟件的方面去實(shí)現(xiàn)伺服電機(jī)的暫停功能。硬件方面就是斷開伺服驅(qū)動(dòng)器的電源,在這里一般都有一個(gè)常閉的信號接到驅(qū)動(dòng)器電源的接觸器上,一旦發(fā)生故障則斷開電源
2019-07-02 15:43:1215151 
如何用一個(gè)PLC控制兩個(gè)或多個(gè)伺服電機(jī)同步運(yùn)行主電機(jī)速度改變時(shí),其它伺服電機(jī)也跟著同步運(yùn)行。用第一個(gè)伺服驅(qū)動(dòng)的輸出控制第二個(gè)伺服驅(qū)動(dòng)器,就可以實(shí)現(xiàn)同步運(yùn)動(dòng)了,只要要求不是太高這種方法完全可行。同步分控制精度來確定控制方案的。
2019-07-18 08:00:0021 伺服電機(jī)如何與plc連接?這個(gè)首先要看你使用伺服電機(jī)的哪種模式,有位置模式、速度模式以及轉(zhuǎn)矩模式,位置模式一般用于定位功能的,最常見最簡單的方式就是通過脈沖+方向的形式來驅(qū)動(dòng)伺服驅(qū)動(dòng)器,位置信號
2019-09-13 16:51:0037943 首先搞清楚這兩個(gè)元件的功能,變頻器是變速裝置,編碼器是計(jì)數(shù)裝置,如何實(shí)現(xiàn)定位控制,原理很簡單:編碼器的作用很重要把脈沖數(shù)轉(zhuǎn)換為位置信號反饋到控制器如PLC,然后PLC根據(jù)位置信號改變速度以及控制變頻器停止。與伺服系統(tǒng)控制的伺服電機(jī)類似。
2019-10-13 14:46:0026989 本文根據(jù)對控制任務(wù)及控制對象的分析,介紹了利用國產(chǎn)信捷XDM系列運(yùn)動(dòng)控制型PLC對4個(gè)伺服電動(dòng)缸進(jìn)行控制的方法,該方法簡單易行,編程容易,可靠性高。
2020-10-16 16:36:548949 
電機(jī)自動(dòng)化控制,需要配套觸摸屏(HMI),Plc,變頻器主要配件就可以完成,能實(shí)現(xiàn)你想要的各種動(dòng)作功能。
2021-07-21 09:51:242231 
不管是伺服電機(jī)還是其他的什么變頻電機(jī)、步進(jìn)電機(jī),它們都能通過總線被PLC控制,畢竟人家PLC就叫可編程邏輯控制器,它是控制器。
2022-09-30 10:22:512778 一般我們控制伺服電機(jī)正反轉(zhuǎn),位置控制,或者是位置+速度控制,都是采用控制器發(fā)脈沖的控制方式,比如三菱PLC的FX2N和三菱的伺服驅(qū)動(dòng)器,就可以利用PLC編輯程序,根據(jù)您所要的當(dāng)量換算,計(jì)算出要發(fā)出的脈沖數(shù),發(fā)送速度等參數(shù),然后驅(qū)動(dòng)設(shè)備運(yùn)行相應(yīng)的距離。
2022-12-07 21:38:222409 伺服電機(jī)最主要的應(yīng)用還是定位控制,位置控制有兩個(gè)物理量需要控制,那就是速度和位置,確切的說,就是控制伺服電機(jī)以多快的速度到達(dá)什么地方,并準(zhǔn)確的停下。
2022-12-12 14:06:174697 在伺服電機(jī)上:設(shè)置控制方式;設(shè)置使能由外部控制;編碼器信號輸出的齒輪比;設(shè)置控制信號與電機(jī)轉(zhuǎn)速的比例關(guān)系。一般來說,建議使伺服工作中的最大設(shè)計(jì)轉(zhuǎn)速對應(yīng)9V的控制電壓。
2023-01-03 12:51:101788 “由PLC+伺服控制器+伺服電機(jī)(配套設(shè)備)+編碼器(外部設(shè)備端)組成的全閉環(huán)系統(tǒng),如何實(shí)現(xiàn)??我的方法是由PLC無限脈沖給伺服器,當(dāng)達(dá)到要求工藝位置(外部編碼器連接至PLC)時(shí)PLC停止脈沖輸出,但實(shí)際停連位置不夠準(zhǔn)確,大概是由于,達(dá)到位置再停止信號會因?yàn)?b class="flag-6" style="color: red">伺服器的減速停車而誤差!!”
2023-02-06 17:33:193108 下面,讓我們來看一下怎樣通過PLC來控制伺服系統(tǒng)吧。
1. 變量添加
在PLC 變量新建一個(gè)變量表,用來存儲伺服軸變量。
2023-02-13 15:37:595353 伺服電機(jī)的使能信號是控制伺服電機(jī)運(yùn)動(dòng)的重要信號之一,通過使能信號的控制,可以實(shí)現(xiàn)對伺服電機(jī)的啟動(dòng)和停止。同時(shí),通過對使能信號的設(shè)置和調(diào)試,還可以實(shí)現(xiàn)對伺服電機(jī)的運(yùn)動(dòng)速度、加速度等參數(shù)的控制,提高
2023-03-03 11:20:4011209 系統(tǒng)中。
伺服控制器通過接收控制信號(通常是脈沖信號或模擬信號),對伺服電機(jī)進(jìn)行精準(zhǔn)的控制,以實(shí)現(xiàn)所需的運(yùn)動(dòng)和位置控制。伺服控制器通常包括微處理器、電源、信號接收電路、驅(qū)動(dòng)電路等組成部分。
2023-03-12 11:12:193787 交流伺服電機(jī)控制系統(tǒng)是什么?一般都是PLC,無論你想通過總線控制交流伺服電機(jī)還是通過脈沖控制交流伺服電機(jī),PLC都可以搞定。 PLC也叫可編程邏輯控制器,是通過數(shù)字量信號或模擬量信號實(shí)現(xiàn)自動(dòng)化
2023-03-16 12:10:02570 PLC控制器不能直接使用,需要進(jìn)行編程才能實(shí)現(xiàn)所需的控制功能。編程過程中需要根據(jù)控制要求和實(shí)際情況,設(shè)計(jì)程序邏輯和相應(yīng)的控制指令,然后將程序下載到PLC控制器中,從而實(shí)現(xiàn)控制功能。因此,PLC控制器需要經(jīng)過編程才能發(fā)揮作用。
2023-03-16 16:50:042552 
總之,PLC控制伺服電機(jī)正反轉(zhuǎn)的工作原理是通過編寫程序、檢測輸入信號、信號處理、控制輸出、反饋監(jiān)測等步驟來實(shí)現(xiàn)。
2023-03-22 17:40:097475 嚴(yán)格來講,編碼器只會告訴你改如何定位,要如何執(zhí)行,是需要靠數(shù)控系統(tǒng)(或者PLC之類控制器)控制伺服或者步進(jìn)電機(jī)來實(shí)現(xiàn)定位的,編碼器好比人的眼睛,知道電機(jī)軸或者負(fù)載處于當(dāng)前某個(gè)位置,工業(yè)上用的一般是光電類型編碼器,下邊簡單說明一下。
2023-04-07 10:16:392031 在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的伺服控制,其實(shí)就是對伺服電機(jī)的位置控制。 其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-04-27 17:34:351115 
現(xiàn)在手上有一個(gè)三菱PLC fx5u和一臺三菱伺服MR-JE-A,以及導(dǎo)程為2mm的導(dǎo)軌,那如何精確控制伺服定位5mm。
2023-05-04 16:09:024655 
PLC控制伺服到底需要哪些信號就可以實(shí)現(xiàn)定位控制了?下面給大家分享兩種控制。
2023-06-06 09:49:00711 
嚴(yán)格來講,編碼器只會告訴你改如何定位,要如何執(zhí)行,是需要靠PLC之類控制器或者步進(jìn)電機(jī)來實(shí)現(xiàn)定位的
2023-07-10 08:46:09559 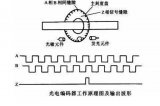
和協(xié)調(diào),確保訂書機(jī)械的正常運(yùn)行。 (2)訂書機(jī)械通常需要對紙張或其他材料進(jìn)行精確定位,以確保準(zhǔn)確的訂書操作。PLC可以通過控制伺服電機(jī)或步進(jìn)電機(jī)等執(zhí)行器,實(shí)現(xiàn)對位置的精確控制和定位。 (3)PLC可以與各種傳感器和檢測設(shè)備配合使用,如
2023-07-18 08:15:02306 天車控制對PLC有以下幾個(gè)主要要求: (1)高精度的位置控制: 天車需要在空中進(jìn)行精確的位置移動(dòng)和定位,因此對于PLC來說,需要具備高精度的位置控制能力。 PLC應(yīng)能夠準(zhǔn)確地控制天車的起停、加速度
2023-08-07 10:15:01266 在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-08-09 09:25:28602 PLC控制伺服到底需要哪些信號就可以實(shí)現(xiàn)定位控制了?下面給大家分享兩種控制。
2023-08-11 10:20:53328 
在回答這個(gè)問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實(shí)就是對伺服電機(jī)的位置控制。其實(shí),伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-09-08 11:22:48737 PLC的運(yùn)動(dòng)控制是指PLC系統(tǒng)通過控制運(yùn)動(dòng)設(shè)備的運(yùn)動(dòng)軸,實(shí)現(xiàn)精確、穩(wěn)定和可編程的運(yùn)動(dòng)控制功能。它可以控制運(yùn)動(dòng)設(shè)備(如電機(jī)、伺服驅(qū)動(dòng)器等)的位置、速度和加速度等參數(shù),以實(shí)現(xiàn)所需的運(yùn)動(dòng)軌跡和運(yùn)動(dòng)邏輯。
2023-10-20 10:20:13690 PLC的運(yùn)動(dòng)控制是指PLC系統(tǒng)通過控制運(yùn)動(dòng)設(shè)備的運(yùn)動(dòng)軸,實(shí)現(xiàn)精確、穩(wěn)定和可編程的運(yùn)動(dòng)控制功能。它可以控制運(yùn)動(dòng)設(shè)備(如電機(jī)、伺服驅(qū)動(dòng)器等)的位置、速度和加速度等參數(shù),以實(shí)現(xiàn)所需的運(yùn)動(dòng)軌跡和運(yùn)動(dòng)邏輯
2023-10-23 08:08:08602 
通過一個(gè)FX3U的CPU就可以帶三個(gè)軸的伺服驅(qū)動(dòng)器。PLC的脈沖輸出端是固定的,Y0、Y1、Y2。具體是否具備脈沖輸出可看模塊的手冊。其余的Y可以作為方向的輸出端。輸出的最大脈沖頻率為100KHz。
2023-10-26 10:08:211459 
伺服電機(jī)重要的應(yīng)用是定位控制。位置控制有兩個(gè)需要控制的物理量,即速度和位置。準(zhǔn)確地說,是控制伺服電機(jī)到達(dá)位置的速度和停止的速度。
2023-11-06 10:29:18332 了解這些就可以搞懂 IGBT
2023-11-24 15:47:29298 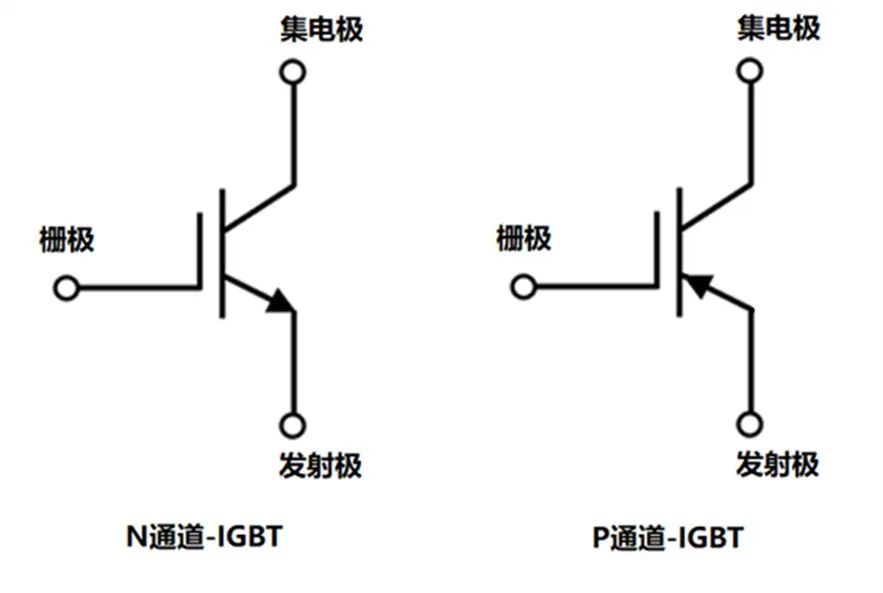
PLC(可編程邏輯控制器)是一種常用于工業(yè)自動(dòng)化系統(tǒng)的控制器。伺服電機(jī)是一種具有高精度、高速度和高可靠性的電動(dòng)機(jī),可以用于實(shí)現(xiàn)精確控制和準(zhǔn)確位置的要求。在PLC中,我們可以使用不同的方法來控制伺服
2023-12-25 11:16:30815 傳送帶控制:PLC可以控制傳送帶的啟停、速度和方向,實(shí)現(xiàn)物料的輸送和分揀。通過讀取傳感器信號,PLC可以實(shí)現(xiàn)自動(dòng)化的物料運(yùn)輸和處理過程。
2024-01-12 09:44:28350 伺服脈沖控制方式通過高速脈沖信號對伺服電機(jī)進(jìn)行精確控制,能夠實(shí)現(xiàn)高精度的定位和速度調(diào)節(jié),提高生產(chǎn)效率和產(chǎn)品質(zhì)量。
2024-01-22 09:34:53164 伺服電機(jī)是一種通過反饋機(jī)制實(shí)現(xiàn)精確位置和速度控制的電機(jī)。伺服電機(jī)通常由電機(jī)、控制器和編碼器等組成。控制器接收來自編碼器的反饋信號,并根據(jù)指令信號調(diào)節(jié)電機(jī)的速度和位置。伺服電機(jī)廣泛應(yīng)用于需要高精度定位
2024-02-04 10:10:45248 請教伺服電機(jī)絕對定位和相對定位問題? 伺服電機(jī)是一種能夠根據(jù)輸入信號精確控制位置、速度和扭矩的電機(jī)。它在自動(dòng)化的工業(yè)領(lǐng)域得到廣泛應(yīng)用,數(shù)據(jù)中心、機(jī)器人、醫(yī)療設(shè)備等都離不開伺服電機(jī)的運(yùn)動(dòng)控制。而伺服
2024-02-05 17:39:501071 噴泉廣泛用于廣場、車站、公園等各種公共和休閑娛樂場所。噴泉控制采用PLC,就可以通過改變PLC中的程序,來改變噴泉的造型及各種不同顏色燈光的映射,使之產(chǎn)生千姿百態(tài)、五顏六色的噴泉效果。
2024-03-15 14:10:3776 
? ? ? 伺服電機(jī)是一種能夠根據(jù)輸入信號精確控制位置、速度和扭矩的電機(jī)。它在自動(dòng)化的工業(yè)領(lǐng)域得到廣泛應(yīng)用,數(shù)據(jù)中心、機(jī)器人、醫(yī)療設(shè)備等都離不開伺服電機(jī)的運(yùn)動(dòng)控制。而伺服電機(jī)的定位方式有兩種,一種
2024-03-18 08:39:4428 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論