

隨著城市化進程的加快,高樓越來越多,高層建筑的多層和高人口密度讓物品配送變得復雜。雖然配送機器人可以解決“最后一公里”的問題,但現有的機器人主要依賴電梯跨樓層。電梯高峰時段效率低,且占用電梯資源,遇到沒有電梯的樓宇更是束手無策。因此,既能搭電梯又能爬樓的配送機器人,正是市場上急需的創新。
一、項目介紹:
這款作品是基于 RDK X3開發板打造的跨樓層智能配送機器人,能輕松切換行駛模式和爬樓模式。配備可伸縮的爬樓輪結構,不論樓梯多陡或多窄,它都能“爬得上去”,跨層配送so easy!不僅如此,機器人還內建視覺識別和語音識別功能,可以和你“無聲無息”地互動,快遞送到手,連說話都能省力!——哈爾濱工程大學 碧海小隊
二、創新點:
目前市場上的配送機器人依賴電梯跨樓層,還需要人工手動輸入地址,這讓配送變得既不高效又不智能。為了彌補這些不足,本作品著重解決了這些“老大難”問題:
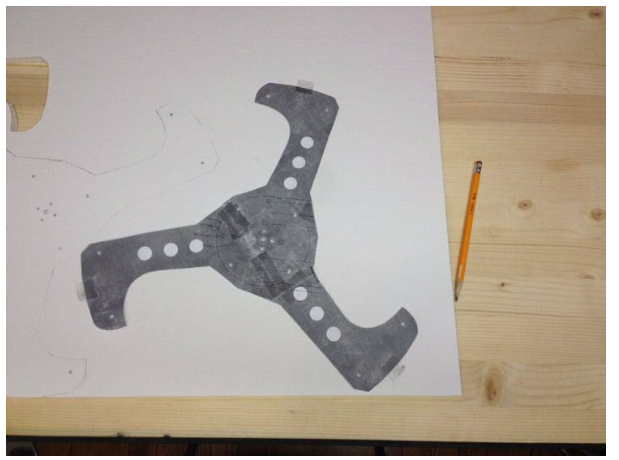
- 爬樓難題: 針對現有機器人無法爬樓梯的缺點,我們設計了一個四片分離式變形輪,電動推桿一拉一縮,輪轂翻轉伸展,輕松上下樓梯。簡直是機器人中的“樓梯小能手”!
- 智能配送: 擺脫手動輸入地址的繁瑣,我們通過OCR、NLP、ASR技術,操作人員只需拍照或者說話,機器人就能自動獲取配送地址。語音反饋當前任務信息,跟機器人聊天就能完成配送任務,人機交互走向“智慧時代”!
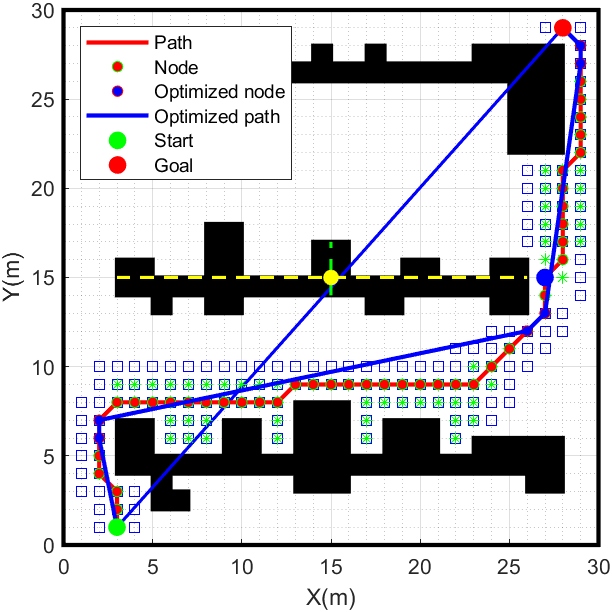
- 路徑規劃: 通過激光雷達建圖與障礙物檢測,對A*算法進行了優化,提高了路徑規劃效率和質量,讓機器人不再繞路而是“直達目標”。
三、原理分析 :
變形輪
為了提高配送效率并避免占用電梯空間,機器人需要能夠上下樓梯和行走。我們設計了可擴式四輪結構,結合電動推桿和電機的運動,使機器人能夠輕松應對樓梯。
當需要爬樓梯時,電動推桿調整輪轂角度并向外擴張,提供支撐力;下樓時,輪轂自動調整,保持穩定。通過這種設計,機器人能適應不同樓梯的高度和角度,確保順利完成樓層間的配送任務。
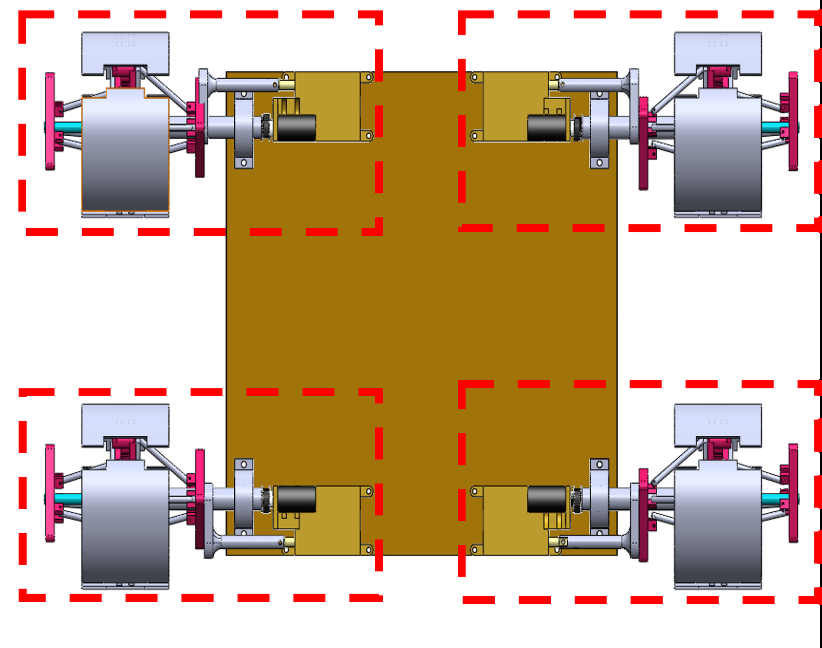
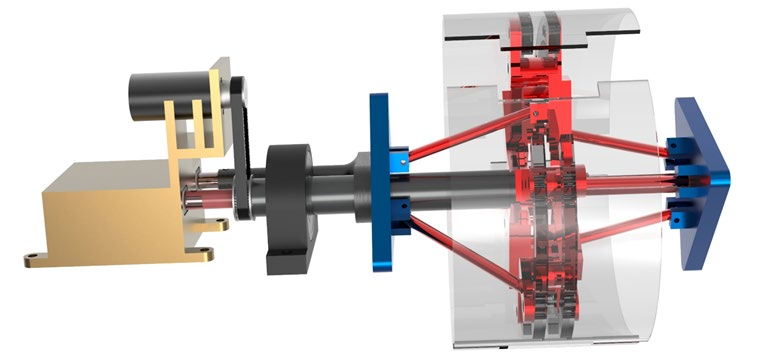
具體來說,每個移動單元由三篇分離式輪轂組成,為了應對不同高度和寬度 的樓梯,我們采用四桿機構,通過四桿機構的的運動調整輪轂伸縮的距離及角度。
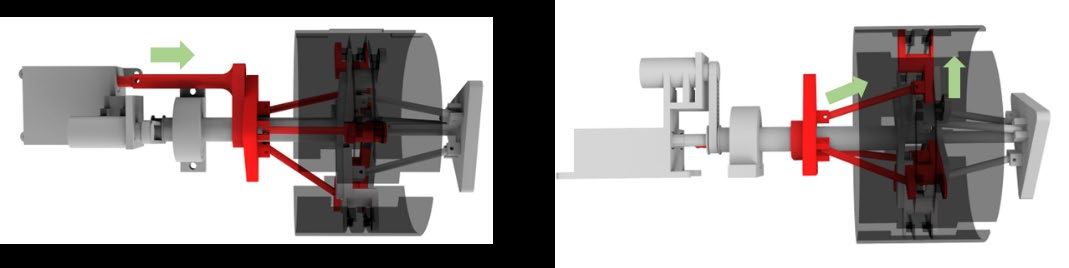
上樓梯時:向里側電動推桿施加正向電流,使得電動推桿伸長,通過左側三 角板帶動連桿向上運動,從而將輪轂翻轉一定角度并向外擴張一定距離以適應樓 梯的高度和寬度。
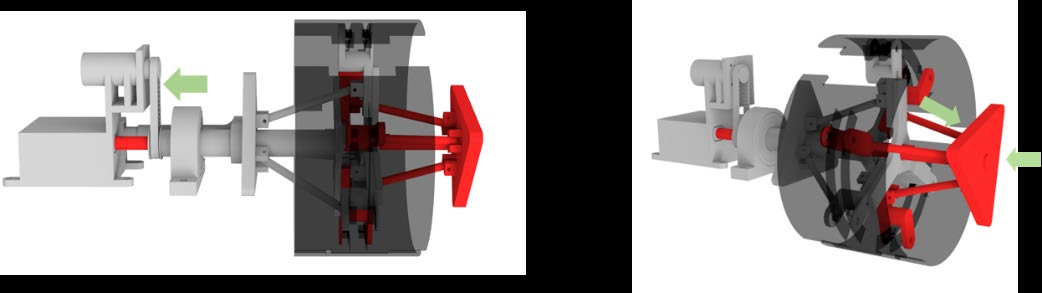
下樓梯時:向外側電動推桿施加反向電流,使得推桿收縮,通過右側三角板 帶動連桿向下運動,從而將輪轂反方向翻轉一定角度并向外擴張一定距離以適應 樓梯的高度和寬度。
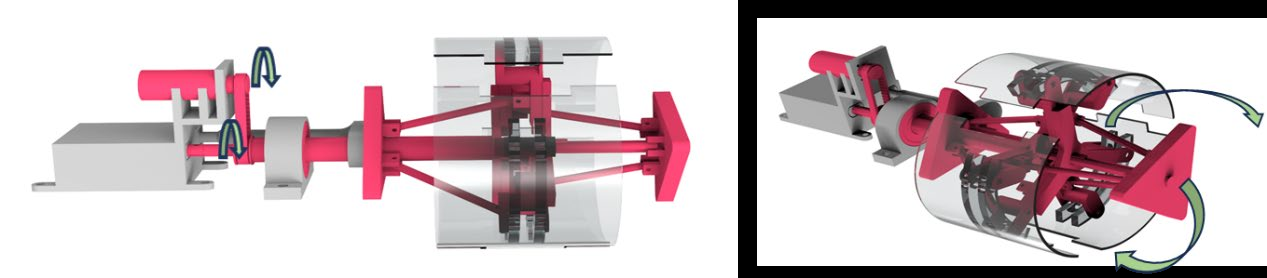
行走時:上側電機通過皮帶帶動右側輪轂及三角板一起旋轉,從而使得機器 人向前運動
路徑規劃原理
A算法是一種啟發式搜索算法,通過從起點開始擴展鄰域節點,比較節點的代價值,選擇代價最小的節點繼續擴展,直到找到目標點,從而避開障礙物,找到最佳路徑。傳統的A算法存在節點過多、路徑冗余以及不夠平滑等問題,這不僅影響機器人的穩定性,還降低了路徑規劃的效率。我們做了以下優化。
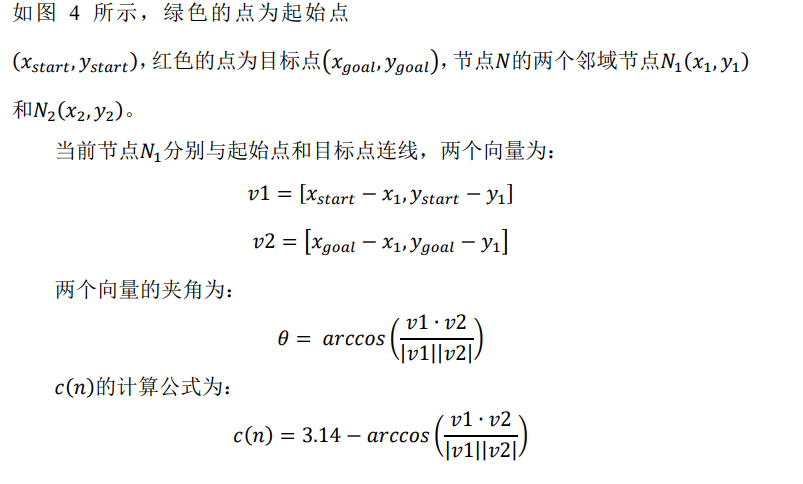
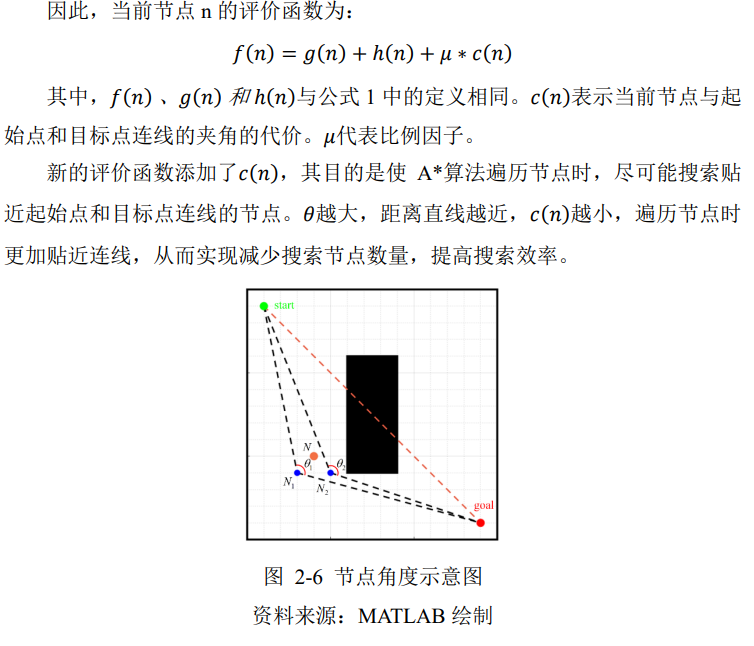
1、傳統的 A-star算法只考慮了距離問題,沒有考慮環境地圖上的許多實際因 素。因此 我們在傳統 A*算法評價函數的基礎上,通過引入節點到起始點和目標 點連線的夾角,對評價函數進行改進。
2、引入雙向搜索策略。在大規模搜索空間下,傳統的 A*算法采用的單向搜索策略存在搜索效率低 搜索節點數量多等問題。
當計算出的中間點位于障礙物內部時,無法有效搜索到起點和目標點,因此需要選擇新的中間點。具體步驟如下:
- 確定中間點的位置。
- 在中間點處繪制一條水平線和一條豎直線。
- 計算水平線和豎直線穿越障礙物的跨越長度。
- 選擇跨越長度較長的方向,并找出最早穿越障礙物的點。
- 將最早穿越障礙物的點作為優化后的中間點。
3、去除冗余節點,在路徑規劃中,冗余節點可能導致內存占用過多和頻繁調整機器人運動。為了解決這個問題,我們采用了一種路徑優化方法來去除冗余節點。具體步驟如下:
- 將起始點作為開始節點。
- 沿路徑預定方向逐一連接起始點與路徑中的各個節點。
- 如果連接線段與障礙物相交,保留相交節點的前一個節點,移除與該節點之間的所有節點,并繼續連接后續節點。
- 如果連接線段不與障礙物相交,直到目標點,保留目標點并移除起始點與目標點之間的節點。
- 將保留的節點依次連接,形成優化后的路徑。
人機交互部分
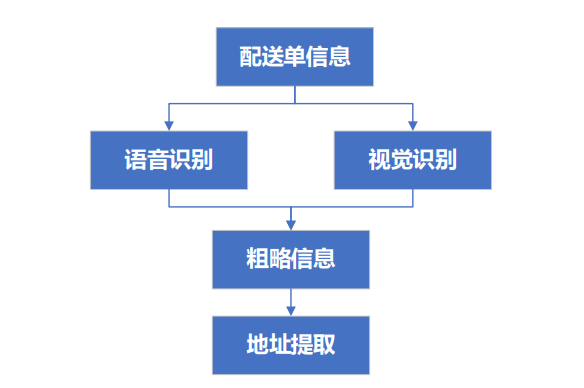
本項目的人機交互部分包括視覺識別和語音識別。首先,通過OCR技術識別配送單據并提取信息,再利用NLP技術獲取最終配送地址。也可以通過語音指令下單,語音識別技術將語音轉為文本,NLP技術提取出地址信息,并通過語音合成技術將地址反饋給操作員確認。
四、硬件系統設計 :
4.1硬件選型
4.1.1 RoboMaster M2006本作品中,電機采用 RoboMaster M2006直流無刷電機,其作用主要是控制 機器人的移動,控制機器人運動到達指定位置并實時反饋運動狀態信息。 RoboMaster M2006使用C610電調進行驅動,使用CAN通信協議發送接收數據, 電機內置位置傳感器,實時反饋轉子機械角度、轉速和轉矩等信息。
4.1.2電動推桿 在本作品中,一個變形輪需要兩個電動推桿,電動推桿又有兩種狀態——伸 出和縮回。一根推桿的伸縮控制變形輪的變大程度,另一根推桿的伸縮控制變形 輪的旋轉角度。作用是通過推桿的伸縮使輪子達到特定的擴大程度和旋轉角度。
4.1.3 TFT-LCD觸摸屏 在本作品中,LCD觸摸屏的主要作用是顯示經 RDK X3 分析處理后的配送 地址,取件碼等信息。本作品采用的是正點原子 2.8寸的 TFTLCD液晶屏。

4.3硬件電路設計
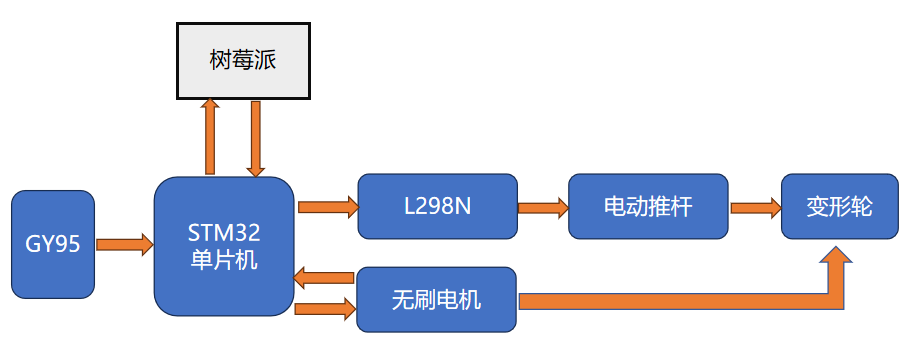
本系統的硬件連接方式如下:樹莓派負責讀取相機圖像數據和地圖建模,并將里程計數據發送給STM32來控制機器人移動。RDK X3主要處理語音交互和視覺識別,并在屏幕和觸摸屏上顯示結果。STM32控制機器人的底盤運動,通過CAN總線控制電機轉動,通過PWM波控制電動推桿的伸縮,并與樹莓派實時通信,反饋機器人運動狀態信息。

五、軟件設計與流程
5.1建圖與規劃流程
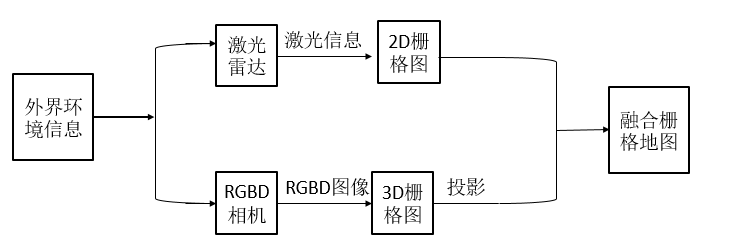
SLAM建圖使用三種地圖:點云圖、柵格圖和八叉樹地圖。雖然激光雷達只能在二維場景中建圖,但它具有較高精度和更遠的建圖范圍,且受外界環境影響較小。路徑規劃中采用2D占用柵格圖模式。激光雷達提供精確的二維信息,而深度相機提供三維信息。為了提高地圖精度,本設計結合了激光雷達和RGBD相機的信息來建立柵格圖,使用激光雷達和深度相機的融合數據,生成2D柵格地圖,并與Cartgrapher算法建立的地圖融合,得到最終的綜合地圖。
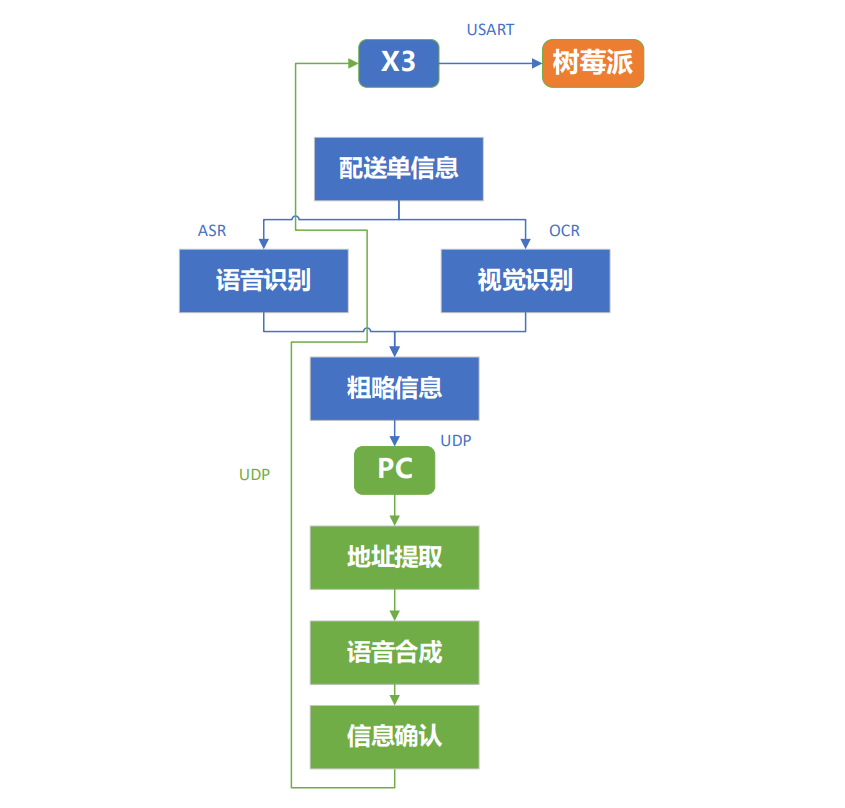
5.2人機交互流程 本項目的人機交互過程如圖所示,通過視覺或語音方式識別出最終配送地點 并傳輸給樹莓派作為最終導航地點。
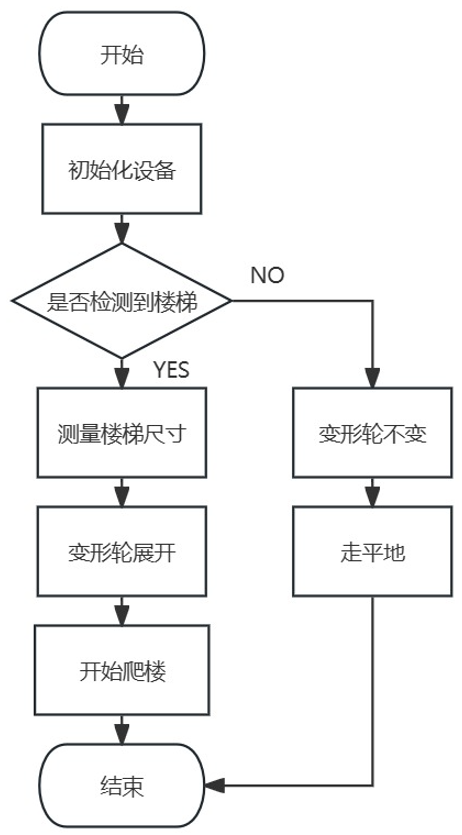
5.3底盤控制軟件流程 在本作品中,底盤控制采用 STM32單片機作為主控芯片,其程序結構圖如 圖所示。當機器人在運動的過程中,會不斷檢測前方是否有樓梯,沒有檢測到樓 梯,變形輪不變形維持原狀;當檢測到樓梯,根據測量的樓梯尺寸,STM32控制 變形輪變形到特定的擴大程度和旋轉角度后,開始爬樓。
六、系統測試
6.1機械結構測試
驗證機械結構可行性、操作穩定性及功能完備性。測試確認:
變形輪通過電動推桿伸縮實現輪轂角度與擴張距離調節,滿足樓梯尺寸自適應需求。
結構設計合理,通過仿真與實際測試驗證,可穩定完成爬樓與行走模式切換。
6.2目標檢測測試
流程與結果:
數據集構建:采集圖像并標注,轉換為YOLOv5s適配格式(圖片+txt)。
模型訓練:基于YOLOv5s,訓練后輸出評估指標:
- Precision: 0.6086
- Recall: 0.5641
- mAP@0.5: 0.5703
- mAP@0.5:0.95: 0.3221
實測效果:成功檢測目標,滿足基礎需求,但精度待優化。
5.3底盤控制測試
電動推桿:PWM控制精度達標,可精準調節變形輪擴張與角度。
里程計:STM32實時讀取速度、加速度、位置信息,誤差<5%。
結論:底盤控制穩定,滿足多模式運動需求。
5.4 SLAM建圖測試
方法對比:
激光雷達:建圖范圍廣,但易受環境縫隙干擾。
RGBD相機:受光照影響,邊界模糊。
融合方案:激光雷達+RGBD投影融合,生成高精度2D柵格地圖,消除縫隙干擾,邊界清晰。
5.5路徑規劃測試
改進A*算法(對比傳統A*):
搜索節點數減少30%,路徑長度縮短15%,規劃時間降低25%。
冗余節點去除后,路徑平滑度提升,內存占用減少20%。
5.6人機交互測試
OCR+NLP:成功從虛擬配送單提取地址,準確率>85%。
ASR+NLP:語音指令中地址抽取準確率>80%,支持模糊語義(如“送到三號樓二層”)。
語音反饋:合成語音播報任務信息,用戶可確認指令正確性。
關鍵結論
- 各模塊功能均通過測試,滿足跨樓層配送需求。
- 目標檢測與路徑規劃精度待優化,可通過擴展數據集與算法調參進一步提升。
隨著城市化進程的加快,高樓越來越多,高層建筑的多層和高人口密度讓物品配送變得復雜。雖然配送機器人可以解決“最后一公里”的問題,但現有的機器人主要依賴電梯跨樓層。電梯高峰時段效率低,且占用電梯資源,遇到沒有電梯的樓宇更是束手無策。因此,既能搭電梯又能爬樓的配送機器人,正是市場上急需的創新。
一、項目介紹:
這款作品是基于 RDK X3開發板打造的跨樓層智能配送機器人,能輕松切換行駛模式和爬樓模式。配備可伸縮的爬樓輪結構,不論樓梯多陡或多窄,它都能“爬得上去”,跨層配送so easy!不僅如此,機器人還內建視覺識別和語音識別功能,可以和你“無聲無息”地互動,快遞送到手,連說話都能省力!——哈爾濱工程大學 碧海小隊
二、創新點:
目前市場上的配送機器人依賴電梯跨樓層,還需要人工手動輸入地址,這讓配送變得既不高效又不智能。為了彌補這些不足,本作品著重解決了這些“老大難”問題:
- 爬樓難題: 針對現有機器人無法爬樓梯的缺點,我們設計了一個四片分離式變形輪,電動推桿一拉一縮,輪轂翻轉伸展,輕松上下樓梯。簡直是機器人中的“樓梯小能手”!
- 智能配送: 擺脫手動輸入地址的繁瑣,我們通過OCR、NLP、ASR技術,操作人員只需拍照或者說話,機器人就能自動獲取配送地址。語音反饋當前任務信息,跟機器人聊天就能完成配送任務,人機交互走向“智慧時代”!
- 路徑規劃: 通過激光雷達建圖與障礙物檢測,對A*算法進行了優化,提高了路徑規劃效率和質量,讓機器人不再繞路而是“直達目標”。
三、原理分析 :
變形輪
為了提高配送效率并避免占用電梯空間,機器人需要能夠上下樓梯和行走。我們設計了可擴式四輪結構,結合電動推桿和電機的運動,使機器人能夠輕松應對樓梯。
當需要爬樓梯時,電動推桿調整輪轂角度并向外擴張,提供支撐力;下樓時,輪轂自動調整,保持穩定。通過這種設計,機器人能適應不同樓梯的高度和角度,確保順利完成樓層間的配送任務。
具體來說,每個移動單元由三篇分離式輪轂組成,為了應對不同高度和寬度 的樓梯,我們采用四桿機構,通過四桿機構的的運動調整輪轂伸縮的距離及角度。
上樓梯時:向里側電動推桿施加正向電流,使得電動推桿伸長,通過左側三 角板帶動連桿向上運動,從而將輪轂翻轉一定角度并向外擴張一定距離以適應樓 梯的高度和寬度。
下樓梯時:向外側電動推桿施加反向電流,使得推桿收縮,通過右側三角板 帶動連桿向下運動,從而將輪轂反方向翻轉一定角度并向外擴張一定距離以適應 樓梯的高度和寬度。
行走時:上側電機通過皮帶帶動右側輪轂及三角板一起旋轉,從而使得機器 人向前運動
路徑規劃原理
A算法是一種啟發式搜索算法,通過從起點開始擴展鄰域節點,比較節點的代價值,選擇代價最小的節點繼續擴展,直到找到目標點,從而避開障礙物,找到最佳路徑。傳統的A算法存在節點過多、路徑冗余以及不夠平滑等問題,這不僅影響機器人的穩定性,還降低了路徑規劃的效率。我們做了以下優化。
1、傳統的 A-star算法只考慮了距離問題,沒有考慮環境地圖上的許多實際因 素。因此 我們在傳統 A*算法評價函數的基礎上,通過引入節點到起始點和目標 點連線的夾角,對評價函數進行改進。
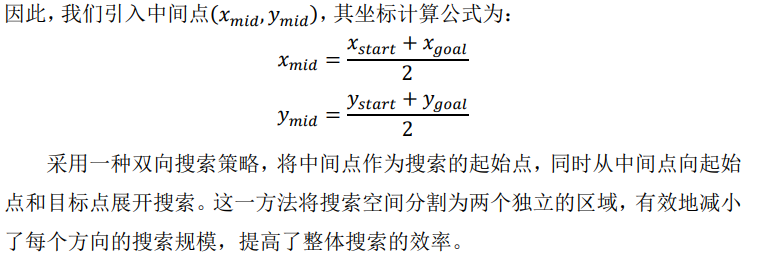
2、引入雙向搜索策略。在大規模搜索空間下,傳統的 A*算法采用的單向搜索策略存在搜索效率低 搜索節點數量多等問題。
當計算出的中間點位于障礙物內部時,無法有效搜索到起點和目標點,因此需要選擇新的中間點。具體步驟如下:
- 確定中間點的位置。
- 在中間點處繪制一條水平線和一條豎直線。
- 計算水平線和豎直線穿越障礙物的跨越長度。
- 選擇跨越長度較長的方向,并找出最早穿越障礙物的點。
- 將最早穿越障礙物的點作為優化后的中間點。
3、去除冗余節點,在路徑規劃中,冗余節點可能導致內存占用過多和頻繁調整機器人運動。為了解決這個問題,我們采用了一種路徑優化方法來去除冗余節點。具體步驟如下:
- 將起始點作為開始節點。
- 沿路徑預定方向逐一連接起始點與路徑中的各個節點。
- 如果連接線段與障礙物相交,保留相交節點的前一個節點,移除與該節點之間的所有節點,并繼續連接后續節點。
- 如果連接線段不與障礙物相交,直到目標點,保留目標點并移除起始點與目標點之間的節點。
- 將保留的節點依次連接,形成優化后的路徑。
人機交互部分
本項目的人機交互部分包括視覺識別和語音識別。首先,通過OCR技術識別配送單據并提取信息,再利用NLP技術獲取最終配送地址。也可以通過語音指令下單,語音識別技術將語音轉為文本,NLP技術提取出地址信息,并通過語音合成技術將地址反饋給操作員確認。
四、硬件系統設計 :
4.1硬件選型
4.1.1 RoboMaster M2006本作品中,電機采用 RoboMaster M2006直流無刷電機,其作用主要是控制 機器人的移動,控制機器人運動到達指定位置并實時反饋運動狀態信息。 RoboMaster M2006使用C610電調進行驅動,使用CAN通信協議發送接收數據, 電機內置位置傳感器,實時反饋轉子機械角度、轉速和轉矩等信息。
4.1.2電動推桿 在本作品中,一個變形輪需要兩個電動推桿,電動推桿又有兩種狀態——伸 出和縮回。一根推桿的伸縮控制變形輪的變大程度,另一根推桿的伸縮控制變形 輪的旋轉角度。作用是通過推桿的伸縮使輪子達到特定的擴大程度和旋轉角度。
4.1.3 TFT-LCD觸摸屏 在本作品中,LCD觸摸屏的主要作用是顯示經 RDK X3 分析處理后的配送 地址,取件碼等信息。本作品采用的是正點原子 2.8寸的 TFTLCD液晶屏。
4.3硬件電路設計
本系統的硬件連接方式如下:樹莓派負責讀取相機圖像數據和地圖建模,并將里程計數據發送給STM32來控制機器人移動。RDK X3主要處理語音交互和視覺識別,并在屏幕和觸摸屏上顯示結果。STM32控制機器人的底盤運動,通過CAN總線控制電機轉動,通過PWM波控制電動推桿的伸縮,并與樹莓派實時通信,反饋機器人運動狀態信息。
五、軟件設計與流程
5.1建圖與規劃流程
SLAM建圖使用三種地圖:點云圖、柵格圖和八叉樹地圖。雖然激光雷達只能在二維場景中建圖,但它具有較高精度和更遠的建圖范圍,且受外界環境影響較小。路徑規劃中采用2D占用柵格圖模式。激光雷達提供精確的二維信息,而深度相機提供三維信息。為了提高地圖精度,本設計結合了激光雷達和RGBD相機的信息來建立柵格圖,使用激光雷達和深度相機的融合數據,生成2D柵格地圖,并與Cartgrapher算法建立的地圖融合,得到最終的綜合地圖。
5.2人機交互流程 本項目的人機交互過程如圖所示,通過視覺或語音方式識別出最終配送地點 并傳輸給樹莓派作為最終導航地點。
5.3底盤控制軟件流程 在本作品中,底盤控制采用 STM32單片機作為主控芯片,其程序結構圖如 圖所示。當機器人在運動的過程中,會不斷檢測前方是否有樓梯,沒有檢測到樓 梯,變形輪不變形維持原狀;當檢測到樓梯,根據測量的樓梯尺寸,STM32控制 變形輪變形到特定的擴大程度和旋轉角度后,開始爬樓。
六、系統測試
6.1機械結構測試
驗證機械結構可行性、操作穩定性及功能完備性。測試確認:
變形輪通過電動推桿伸縮實現輪轂角度與擴張距離調節,滿足樓梯尺寸自適應需求。
結構設計合理,通過仿真與實際測試驗證,可穩定完成爬樓與行走模式切換。
6.2目標檢測測試
流程與結果:
數據集構建:采集圖像并標注,轉換為YOLOv5s適配格式(圖片+txt)。
模型訓練:基于YOLOv5s,訓練后輸出評估指標:
- Precision: 0.6086
- Recall: 0.5641
- mAP@0.5: 0.5703
- mAP@0.5:0.95: 0.3221
實測效果:成功檢測目標,滿足基礎需求,但精度待優化。
6.3底盤控制測試
電動推桿:PWM控制精度達標,可精準調節變形輪擴張與角度。
里程計:STM32實時讀取速度、加速度、位置信息,誤差<5%。
結論:底盤控制穩定,滿足多模式運動需求。
6.4 SLAM建圖測試
方法對比:
激光雷達:建圖范圍廣,但易受環境縫隙干擾。
RGBD相機:受光照影響,邊界模糊。
融合方案:激光雷達+RGBD投影融合,生成高精度2D柵格地圖,消除縫隙干擾,邊界清晰。
6.5路徑規劃測試
改進A*算法(對比傳統A*):
搜索節點數減少30%,路徑長度縮短15%,規劃時間降低25%。
冗余節點去除后,路徑平滑度提升,內存占用減少20%。
6.6人機交互測試
OCR+NLP:成功從虛擬配送單提取地址,準確率>85%。
ASR+NLP:語音指令中地址抽取準確率>80%,支持模糊語義(如“送到三號樓二層”)。
語音反饋:合成語音播報任務信息,用戶可確認指令正確性。
關鍵結論
- 各模塊功能均通過測試,滿足跨樓層配送需求。
- 目標檢測與路徑規劃精度待優化,可通過擴展數據集與算法調參進一步提升。
-
機器人
+關注
關注
212文章
28995瀏覽量
209968 -
AI
+關注
關注
87文章
32740瀏覽量
272169 -
RDK
+關注
關注
0文章
18瀏覽量
9102
發布評論請先 登錄
相關推薦
美軍研發能跳《江南Style》的新型機器人
簡易DIY——太陽能衛星陀螺機器人
AI語音智能機器人開發實戰
這款爬樓快遞機器人,可以讓你不用下樓,快遞直接送進家
Cheetah 3獵豹機器人,一款不靠視覺就能移動的機器人
能爬樓梯的快遞機器人如果量產 快遞小哥真的要失業了
如何實現雙足機器人爬樓梯的步態規劃與參數優化
自動調整平衡的爬樓梯機器人設計
如何利用Arduino UNO制作一個爬樓梯機器人

全球招募新品體驗官 | 30天玩轉地平線RDK X3 Module

地平線RDK X3語音算法通過Alexa ACM方案認證







 工商網監
工商網監

評論