") 一文了解底盤域控之制動功能
一文了解底盤域控之制動功能
1 底盤域控基礎(chǔ)
1.1 底盤域控的概念
1.2 線控底盤技術(shù)
1)線控制動系統(tǒng)
2)線控轉(zhuǎn)向系統(tǒng)
2 制動系統(tǒng)功能
2.1 制動系統(tǒng)原理
2.2 制動系統(tǒng)的發(fā)展歷史
2.3 電子穩(wěn)定系統(tǒng)ESP
2.4 線控制動系統(tǒng)--EHB
1)Two box - iBooster+ESP
2)One box -IPB
3 駐車制動系統(tǒng)
3.1 駐車制動系統(tǒng)基礎(chǔ)
3.2 EPB的功能
3.3 EPB的實現(xiàn)方案
1 底盤域控基礎(chǔ)
1.1 底盤域控的概念
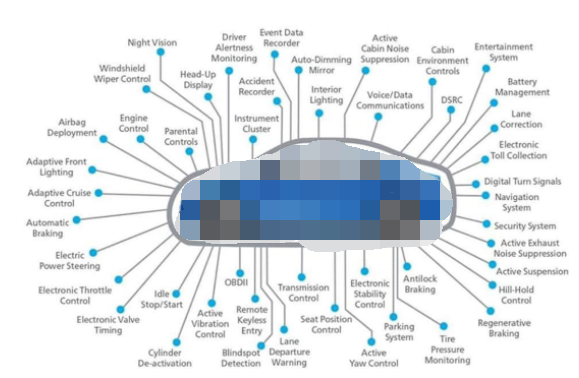
隨著汽車行業(yè)的快速發(fā)展,最初用于發(fā)動機控制的ECU逐漸擴展到車身,底盤,智能座艙和智能駕駛。這樣使得整車電子電器架構(gòu)變得越來越復(fù)雜,也越來越難以維護和升級。
Source: EEA_BBMInnoChinese20160929.pptx
因此,在這樣的需求背景下,傳統(tǒng)的分布式架構(gòu)朝著域集中式架構(gòu)快速發(fā)展,新一代架構(gòu)采用了適當(dāng)?shù)募苫脚_的可擴展性變得更好。考慮到車身與底盤等部分的少數(shù)ECU對安全性和可靠性要求較高,全部集成的難度較高,因此目前各OEM家會根據(jù)自身的設(shè)計理念差異而劃分成幾個不同的域,通常劃分為5個域:動力域、底盤域、車身域、座艙域和ADAS域,如下所示:

Source: Microsoft PowerPoint - EEA_BBMInnoChinese20160929.pptx
以底盤域為例,一方面,底盤域控制器具備網(wǎng)關(guān)的協(xié)議轉(zhuǎn)換功能,通常利用CAN網(wǎng)絡(luò)接收駕駛員的操縱指令或智能駕駛指令,以及同汽車動態(tài)特征有關(guān)的所有傳感器的信息;另一方面,底盤域控制器同本域內(nèi)所有的執(zhí)行ECU通過CAN網(wǎng)絡(luò)連接起來,底盤域控制器運行底盤最高層的控制策略和控制邏輯,包括駕駛員意圖識別,XYZ控制,故障診斷與降級處理等。總之,底盤域控制器會進行綜合平衡和全面協(xié)調(diào),會對汽車底盤各子執(zhí)行控制系統(tǒng)進行合理分工,會用最佳的方法來完成汽車的動態(tài)控制和穩(wěn)定。底盤域控的另一趨勢是正在向線控底盤發(fā)展。
1.2 線控底盤技術(shù)
線控底盤技術(shù)是指利用傳感器感知駕駛員駕駛意圖(方向,油門和制動),并將其通過硬線輸送給底盤域控制器,然后底盤域控制器計算或決策出線控驅(qū)動、線控轉(zhuǎn)向、線控制動和線控懸掛的控制指令,然后響應(yīng)的執(zhí)行控制器根據(jù)控制指令來實現(xiàn)汽車的轉(zhuǎn)向、制動、驅(qū)動等功能,從而取代傳統(tǒng)汽車靠機械或液壓來傳遞操縱信號的控制方式。線控底盤最核心的是線控制動和線控轉(zhuǎn)向系統(tǒng)。
1)線控制動系統(tǒng)
線控制動系統(tǒng),即Brake-By-Wire,是線控底盤技術(shù)中是難度最高的,但也是最關(guān)鍵的技術(shù)。線控制動系統(tǒng)掌控著自動駕駛的底盤安全性和穩(wěn)定控制,只有擁有足夠好的制動性能(包括響應(yīng)速度快、平順性好等),才能為我們的安全提供良好保障。
線控制動系統(tǒng)根據(jù)車輪制動壓力系統(tǒng)的不同可分為電控液壓制動系統(tǒng)EHB和電控機械制動系統(tǒng)EMB兩大類。
EHB由電子制動踏板模塊、電控單元 (ECU)、液控單元(HCU)、傳感器和CAN網(wǎng)絡(luò)等部分組成。各車輪的制動力矩仍然靠輪缸里的液壓產(chǎn)生,輪缸與EHB的HCU相連通,HCU的能量來源不再是駕駛員,而是由電動液壓泵所產(chǎn)生的高壓油。當(dāng)駕駛員踩制動踏板時,制動踏板力和行程由傳感元件所測量,將其結(jié)果傳遞給ECU,然后ECU對HCU 中不同的電磁閥門進行相應(yīng)的控制來調(diào)節(jié)各輪缸的壓力。

source: What is electro-hydraulic braking? PH Explains
同EHB系統(tǒng)相比, EMB的執(zhí)行機構(gòu)也發(fā)生了質(zhì)的變化。它的車輪制動壓力不再由液壓產(chǎn)生,而是來源機電一體式制動器,4個獨立的高性能機電一體式制動器在每個車輪上產(chǎn)生制動力。EMB系統(tǒng)由電子制動踏板模塊、主電子控制單元(ECU)、4個包含電控模塊(WCU)的機電一體式制動器、多種傳感器和CAN網(wǎng)絡(luò)等部分組成。剎車時,電子制動踏板模塊感知駕駛員的指令,通過CAN同時向主ECU發(fā)出信號,主ECU計算出各個車輪期望制動力,并將執(zhí)行指令傳遞給4個WCU。WCU對控制機電一體式制動器作相應(yīng)的控制和調(diào)節(jié),來完成必要的制動力矩響應(yīng)。

source: Brembo details its Brake-by-Wire system - Professional Motor Mechanic
2)線控轉(zhuǎn)向系統(tǒng)
線控轉(zhuǎn)向系統(tǒng),即Steer-By-Wire,能夠無束縛地得到無人駕駛進行轉(zhuǎn)彎的指令目標(biāo)輸入和汽車轉(zhuǎn)向輪的變化之間的關(guān)系,可以控制轉(zhuǎn)向機構(gòu)和行駛需要之間的關(guān)系,這樣就能夠?qū)囕v進行調(diào)節(jié)。線控轉(zhuǎn)向系統(tǒng)直接關(guān)系到自動駕駛路徑與方向的精確控制。
source: Steer by wire toyota (http://automotorpad.com)
線控轉(zhuǎn)向系統(tǒng)一般由轉(zhuǎn)向盤和轉(zhuǎn)向盤力矩模擬電機、轉(zhuǎn)向盤轉(zhuǎn)角傳感器、控制器單元(ECU)以及車輪轉(zhuǎn)向執(zhí)行機構(gòu)等部分組成。當(dāng)駕駛員操縱轉(zhuǎn)向盤轉(zhuǎn)向時,一方面執(zhí)行電機要根據(jù)駕駛員的意向?qū)η拜喌霓D(zhuǎn)角進行相應(yīng)的調(diào)節(jié)和控制;另一方面轉(zhuǎn)向盤力矩模擬電機要根據(jù)汽車的運動狀況計算出轉(zhuǎn)向盤的回正力矩,為駕駛員模擬相應(yīng)的路感。
除此之外,線控底盤技術(shù)還包括線控驅(qū)動和線控懸架,總的來說線控底盤技術(shù)是一個很宏大的話題,本文接下來將只對線控制動技術(shù)進行介紹。
2 制動系統(tǒng)功能
線控制動是底盤域控的重要內(nèi)容,其功能主要包括行車制動和駐車制動。為了深入了解線控制動,本文先從行車制動系統(tǒng)為切入點,梳理該制動系統(tǒng)的基礎(chǔ)內(nèi)容,包括基本概念,發(fā)展過程,組成與工作原理等內(nèi)容,再對駐車制動系統(tǒng)進行介紹。

為了建立對制動系統(tǒng)的最初步認識,先了解制動系統(tǒng)原理以及制動系統(tǒng)的發(fā)展歷史。
2.1 制動系統(tǒng)原理
關(guān)于制動系統(tǒng)原理,本質(zhì)上各種類型制動系統(tǒng)都一樣,這里以典型的真空助力制動系統(tǒng)為例子來說明。如下圖所示,真空助力制動系統(tǒng)組成包括制動踏板,真空助力器,制動液,制動油管,制動主缸,制動輪缸和車輪制動器(盤式/鼓式制動器)等。

source: What You Need to Know About Brakes - R&L Automotive
其具體工作原理是:
- 首先,駕駛員踩制動踏板,施加到踏板的力經(jīng)過杠桿機構(gòu)第一級放大傳遞到真空助力器;
- 然后,真空助力器經(jīng)過第二級放大將制動力傳遞到制動主缸,同時在蓄能器作用下進一步加壓,將制動主缸的制動液推入到制動輪缸;
- 最后,制動輪缸的制動液推動輪端制動器加緊剎車盤,阻礙剎車盤轉(zhuǎn)動,以此實現(xiàn)制動。

source:vehicle brake system
2.2 制動系統(tǒng)的發(fā)展歷史
制動系統(tǒng)的發(fā)展過程大致分為5個階段,即:
1)人力機械式到真空助力液壓式
最初的汽車制動系統(tǒng)是人力機械式,即駕駛員操縱一組簡單的機械裝置向制動器直接施加作用力。那時汽車小,重量輕,速度低,人力機械制動能夠滿足汽車制動的要求。隨著汽車的不斷發(fā)展,汽車變得越來越大,也越來越重,人力機械制動系統(tǒng)不再好使了,同時伴隨著科技的不斷進步,一些新技術(shù)被引入到汽車制動系統(tǒng),真空助力液壓制動系統(tǒng)被設(shè)計出來。

source:148-001-Brakes101-BrakeDiagram.jpg
2)ABS+TCS+VDC-->ESP
隨著汽車的速度越來越快,對汽車的操作穩(wěn)定性能要求也越來越高。因此,最先是應(yīng)用ABS功能來解決車輪抱死問題,然后是應(yīng)用TCS功能來解決牽引力驅(qū)動問題,再是應(yīng)用VDC功能來解決車輛動態(tài)控制問題。這三個功能集成在一個控制器,也就是前面所提到的ESP,這樣,汽車制動系統(tǒng)進化成真空助力液壓制動+ESP組合形式。

source: 汽車線控制動系統(tǒng)ibooster詳解_ibooster工作原理
3)電動助力代替真空助力
面對日益緊張的能源問題,對于汽車,一方面,需要發(fā)動機的燃燒效率不斷提升,這時需要采取將更多的空氣通入氣缸的方法來提升燃燒效率,而這種方法會導(dǎo)致真空度降低,對制動助力產(chǎn)生不利影響。另一方面,發(fā)展新能源汽車,用電機代替發(fā)動機,而發(fā)動機產(chǎn)生真空源,沒了發(fā)動機,真空助力器就使用受限。另外,新能源汽車為了更加節(jié)能,有再生制動和能量回收的需求。為了解決這些問題,電動助力就被推出,比如博世最先推出了iBooster:
source: 博世Bosch iBooster工作原理,ESP HEV Tesla model3
采用電動助力后,制動系統(tǒng)不需要真空源,取代了傳統(tǒng)的真空泵和真空軟管,使得整個系統(tǒng)體積更小,重量也更輕;又可以再生制動和能量回收,整體系統(tǒng)更加節(jié)能;另外相較于真空助力,電動助力響應(yīng)速度更快,控制壓力也更精準(zhǔn)。
4)線控制動系統(tǒng)
最近幾年,隨著智能駕駛的更高智能化需求,也考慮到未來自動駕駛的發(fā)展,對線控制動系統(tǒng)的需求也越來越強烈。各大供應(yīng)商積極響應(yīng)市場需求,陸續(xù)量產(chǎn)了相應(yīng)的產(chǎn)品。

source: 線控制動之BOX之爭_搜狐汽車
比如博世的IPB(Integrated Power Brake),本質(zhì)上是將iBooster和ESP合二為一。但IPB縮小了制動系統(tǒng)的體積,減輕了重量,降低了成本;同時,IPB解耦了踏板系統(tǒng),更能滿足智能駕駛的制動需求。
5)線控制動系統(tǒng): EHB & EMB
上面的iBooster+ESP和IPB都被劃分為線控制動系統(tǒng)的一種-電子液壓制動系統(tǒng)即EHB(Electro-hydraulic brake system),而EMB(Electro-mechanical brake system)屬于另一種-電控機械制動系統(tǒng)。EMB是一種電控純機械制動,采用電子機械系統(tǒng)取代了傳統(tǒng)制動系統(tǒng)中的液壓系統(tǒng),四輪的制動執(zhí)行機構(gòu)分別由獨立的電機來驅(qū)動,如下簡圖:

source: FlexRay_E: Brake-by-wire
可以說,EMB 是真正意義上的線控制動系統(tǒng),但一些EMB的核心技術(shù)問題仍未解決,所以目前的EMB方案都沒有量產(chǎn)。現(xiàn)在市場主流的線控制動系統(tǒng)都是EHB。

source: Bosch video & Braking 101: The System, Physics and Science of the Motion Management
以上就簡單介紹了制動系統(tǒng)發(fā)展的過程與趨勢,接下來繼續(xù)介紹主流的線控制動系統(tǒng)--EHB,不過先得從ESP說起。
2.3 電子穩(wěn)定系統(tǒng)ESP
在了解了制動系統(tǒng)的原理及其發(fā)展歷史后,接下來我們來了解行車制動的主要功能,這個得從電子穩(wěn)定系統(tǒng)ESP開始。汽車雖然具備基本的制動系統(tǒng),但隨著汽車速度越來越快,并不能完全保證行駛的安全穩(wěn)定。比如緊急剎車,踏板踩到底,這時車輛可能會出現(xiàn)轉(zhuǎn)向困難或側(cè)滑;或在光滑路面有時會出現(xiàn)驅(qū)動輪打滑而失控,或者有時出現(xiàn)轉(zhuǎn)向不足或過度而失控等問題。
為了解決這些問題,一代代工程師不斷努力,迭代出了基于制動系統(tǒng)的電子控制系統(tǒng)(ESP, Electronic Stability Program)。ESP的核心功能主要包含3塊:ABS(Anti-lock Brake System,防抱死系統(tǒng))、TCS(Traction Control System,牽引力控制系統(tǒng))、VDC(Vehicle Dynamics Controller,車輛動態(tài)控制器)。
1)ABS
緊急剎車會使輪胎抱死(車輪不能轉(zhuǎn)動),前輪抱死會失去轉(zhuǎn)向能力,后輪抱死易側(cè)滑。這時有了ABS功能,就會采用類似于點剎的操作,讓車輪處于“邊滾邊滑”的狀態(tài),使得車輪不抱死,車輛就不會失控,從而避免撞上障礙物。
2)TCS
車輛起步時驅(qū)動輪打滑,無法起步,同時可能會方向失控。這時啟用TCS,比如車輛在冰面起步,通過TCS調(diào)節(jié)驅(qū)動力,使得車輛正常起步;或車輛在分離路面(一側(cè)高附,另一側(cè)低附),通過TCS調(diào)節(jié)驅(qū)動力的同時,對低附側(cè)車輪施加制動力,使得車輛正常起步。
3)VDC
ABS/TCS解決了車輛縱向方向的控制問題,比如制動和起步,但是車輛橫向方向的控制問題,比如轉(zhuǎn)向不足或轉(zhuǎn)向過度。這時需要使用VDC來解決,針對車輛出現(xiàn)轉(zhuǎn)向不足時,VDC將對車輛內(nèi)側(cè)后輪進行額外的制動,以增加車輛橫擺,讓車頭向彎內(nèi)方向擺動;針對車輛出現(xiàn)轉(zhuǎn)向過度時,VDC將對車輛外側(cè)前輪進行額外的制動,以減少車輛橫擺,讓車頭向彎外方向擺動。
隨著技術(shù)的不斷優(yōu)化與迭代,除了上述三大功能,ESP還增加了更多的功能,比如電子制動力分配功能(EBD),其取代了通過機械部件分配前后軸的制動力。EBD不僅降低了成本,而且使制動力的分配極其靈活。另外,ESP系統(tǒng)也逐漸在集成其他附加功能,包括
- 液壓制動輔助功能(Hydraulic Brake Assist, HBA): HBA檢測緊急制動情況,通過將制動壓力提高到車輪抱死的極限值來縮短制動距離。
- 駐車制動的減速控制功能(Controlled Deceleration for Parking Brake, CDP): 當(dāng)駕駛員請求時,CDP制動車輛直至靜止。
- 坡道輔助控制功能(Hill Hold Control, HHC): 當(dāng)車輛駛離坡道時,HHC干預(yù)制動系統(tǒng),防止溜坡。
- 陡坡緩降控制功能(Hill Descent Control, HDC): HDC通過自動剎車幫助駕駛員下陡坡。
- 液壓衰退補償功能(Hydraulic Fading Compensation, HFC): 如果即使駕駛員用力踩下制動踏板,也無法達到最大可能的車輛減速,HFC會進行干預(yù)。
- 液壓后輪增壓功能(Hydraulic Rear Wheel Boost, HRB): 在ABS制動應(yīng)用期間,HRB還能增加后輪的制動壓力達到車輪抱死的極限值。
- 制動盤擦拭功能(Brake Disk Wiping, BDW): BDW通過短暫的制動去除制動盤上的飛濺水,這個制動不會被駕駛員感知到。
以上僅僅列舉幾種典型的附加功能,其實還有更多的附加功能,這里就不再列舉。
2.4 線控制動系統(tǒng)--EHB
聊起線控制動系統(tǒng),就常聽到two box和one box,它們是什么?

這兩詞其實指從集成度角度劃分的兩種EHB技術(shù)方案。two box是指制動系統(tǒng)主體包括電子助力器和電子穩(wěn)定控制模塊,比如博世的iBooster+ESP。而one box是指將制動系統(tǒng)將電子助力器和ESP模塊集成為一體,比如博世的IPB。
下面借助博世這兩個產(chǎn)品,說明它們的組成和基本工作原理,以此來加深two box 和 one box的概念。
1)Two box - iBooster+ESP
先了解iBooster。iBooster這項制動技術(shù)是博世2013推出,目前博世 iBooster 已經(jīng)更新到第二代產(chǎn)品。iBooster的組成如下圖所示:

source: 博世IBooster系統(tǒng)解析
iBooster的工作原理是:駕駛員踩下制動踏板,踏板移動輸入推桿;踏板行程差傳感器檢測到輸入推桿的位移,提供位移信號給電控單元;電控單元計算并控制電機產(chǎn)生的目標(biāo)助力扭矩;傳動裝置將該扭矩轉(zhuǎn)化為相應(yīng)的制動力,與踏板的輸入產(chǎn)生的輸入推桿力一起作用在制動主缸,共同轉(zhuǎn)化為制動器輪缸液壓力,以此來實現(xiàn)制動。

source: 博世iBooster系統(tǒng)解析
另外,iBooster的電機助力特性可充分考慮駕駛員的駕駛喜好和風(fēng)格,可提供不同類型的踏板感,可以偏舒適類型,也可以偏運動類型。
再了解ESP。ESP是以車輪滑動調(diào)節(jié)系統(tǒng)為基礎(chǔ),它不僅集成了ABS,TCS和VDC三大核心功能,還包括EBD(電子制動力分配系統(tǒng)),HDC(陡坡緩降控制),HAS(坡道起步輔助),DTV(動態(tài)扭矩哦控制)等多項功能。
ESP的組成包括傳感器(信號輸入裝置)、電子控制單元,制動液壓系統(tǒng)和執(zhí)行器等部件,如下所示:

source:圖解汽車ESP電子穩(wěn)定系統(tǒng)結(jié)構(gòu)與功能_搜狐汽車
ESP的工作原理是:輪速傳感器、加速度傳感器 制動壓力傳感器、轉(zhuǎn)向傳感器等檢測相應(yīng)的信號,提供給控制器;控制器根據(jù)這些信號和其他控制器提供的信息對車輛狀態(tài)進行判斷和計算,決策如何去控制相應(yīng)的執(zhí)行器;執(zhí)行器接收到實際的激勵而動作,以此實現(xiàn)ESP里相應(yīng)的功能,確保車輛的操作穩(wěn)定性能。
通過上述對iBooster與ESP的基本說明,不難理解,使用兩者構(gòu)成two box的方案,一方面既可實現(xiàn)制動功能又可確保操作穩(wěn)定性能;另一方面兩者可互為冗余,一旦 iBooster 失效,ESP 系統(tǒng)將接管并提供制動助力,即使兩者都失效,仍然可依靠純液壓制動系統(tǒng)制動,這樣雙冗余備份方法將對智能駕駛功能的實現(xiàn)極具價值。

source:【雜談】——博世iBooster探秘
2)One box -IPB
IPB是博世著手針對未來更高智能化需求的L3和L4而推出,IPB可理解是將電子助力器和ESP集成為一體, 它具有最高的動力性能,有助于提高混合動力車和電動車的效率,由于采用了一體化設(shè)計,重量和復(fù)雜性都降到了最低。
對于IPB工作原理,與iBooster+EPS方案一樣,也就是:當(dāng)駕駛員踩下制動踏板時,控制單元通過集成傳感器計算駕駛員的制動要求;IPB使兩個制動回路與制動踏板解耦,并與踏板感模擬器建立連接。與此同時,控制單元會計算電機的驅(qū)動信號,電機通過一個齒輪裝置產(chǎn)生液壓活塞移動,由此產(chǎn)生的液壓力通過制動液傳遞到車輪制動器,以此實現(xiàn)制動。

source: Integrated Power Brake – modular set extension for highly automated driving
關(guān)于失效處理,IPB會比較復(fù)雜,不同的失效類型會對應(yīng)不同的降級模式。比如因斷電造成助力失效時,IPB會進入機械備份模式,通往踏板感模擬器的電磁閥關(guān)閉,電機通往輪端的電磁閥也關(guān)閉,主缸主、副腔通往輪端的電磁閥打開,駕駛員踩踏板建立的壓力直接傳遞到制動輪缸,以此實現(xiàn)車輛制動。
而對于更高級別自動駕駛制動系統(tǒng),在任何情況下,制動都由制動系統(tǒng)自動完成,不在由駕駛員操作,因此失效處理就更為棘手。博世提出了一個冗余制動單元(RBU,Redundant Brake Unit)作為IPB的補充,具體可參考:Integrated Power Brake – modular set extension for highly automated driving。

source: Integrated Power Brake – modular set extension for highly automated driving
這樣,IPB作為主要的制動系統(tǒng)來執(zhí)行絕大多數(shù)情況下的制動請求,RBU作為IPB失效情況下的冗余制動,代替駕駛員操作,以此進一步提高系統(tǒng)的可靠性。
以上就是基于博世的兩款產(chǎn)品對EHB的two box和 one box介紹。
3 駐車制動系統(tǒng)
上面介紹完了行車制動系統(tǒng)內(nèi)容,接下來將介紹駐車制動系統(tǒng)內(nèi)容。
3.1 駐車制動系統(tǒng)基礎(chǔ)
駐車制動系統(tǒng)是指通過鎖住傳動軸或者后輪來達到控制停車制動的系統(tǒng),主要包括機械手剎和電子手剎。

Source:你能hold住嗎?詳解四大駐車制動裝置
關(guān)于機械手剎,即傳統(tǒng)的手剎或腳剎,由制動桿、拉線、制動機構(gòu)以及回位彈簧組成。制動桿通過杠桿原理,使得駕駛員用很小的拉力就能將其拉到固定位置,然后通過鎖止牙鎖止駐車。
Source: What Is Electric Parking Brake (EPB)? How Does It Work?
關(guān)于電子手剎,分為拉索式與卡鉗式兩種。拉索式電子手剎與傳統(tǒng)手剎差別不大,同為制動蹄式,只是把手動的拉索改為電動形式。對于線控制動,關(guān)注的是卡鉗式電子手剎,即電子駐車系統(tǒng),即EPB(Electrical Park Brake)。

Source: What Is Electric Parking Brake (EPB)? How Does It Work?
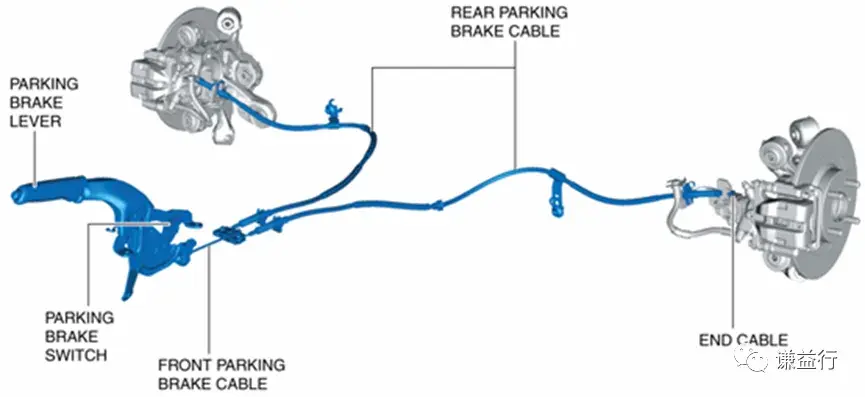
EPB主要由EPB開關(guān),電控單元ECU,卡鉗和卡鉗電機組成,其工作原理是駕駛員按下EPB開關(guān),電控單元ECU檢測到駐車功能激活,就會計算和發(fā)出控制指令來驅(qū)動執(zhí)行電機,進而執(zhí)行電機會使卡鉗卡緊剎車片,從而控制停車制動。
3.2 EPB的功能
EPB的功能要求包括下面3個方面:
- 產(chǎn)生穩(wěn)定的駐車制動力;
- 可以根據(jù)檢測到的車況自動調(diào)節(jié)車輛的制動力;
- 將車輛駐車制動狀態(tài)顯示給駕駛員。

Source: Teemo天尚元 EPB電子駐車系統(tǒng) 剎車冗余 防溜坡功能
下面列舉了幾項EPB的具體功能:
- 靜態(tài)控制:在汽車處于靜止?fàn)顟B(tài)下,駕駛員能夠經(jīng)由EPB開關(guān)實現(xiàn)提供或者釋放駐車制動力,便于汽車的駐車和被驅(qū)動。
- 溜車預(yù)防:通過對駐車制動力的獲取和識別,實現(xiàn)在制動器處在非正常狀態(tài)下的安全順利實施駐車制動,如制動系統(tǒng)在長時間實施制動后制動器過熱或者由于制動器使用腳久而導(dǎo)致的制動器摩擦力的產(chǎn)生不足,因而保證了車輛不發(fā)生溜車現(xiàn)象。
- 坡道駛離輔助:駕駛員需要從坡道上起步時,EPB需要根據(jù)傳統(tǒng)駐車制動系統(tǒng)的專家經(jīng)驗,結(jié)合駕駛員踩下離合器和加速踏板的實際情況逐步的釋放駐車制動力,直至最后得以實現(xiàn)車輛平穩(wěn)起步。
- 自動斜坡輔助駐車:駕駛員需要將車輛停在坡道上時,駕駛員通過踩下制動踏板,使車輛停止下來,而此時,只要駕駛員釋放制動踏板,EPB系統(tǒng)則自行啟動駐車制動。
- 動態(tài)控制:車輛行駛時,EPB系統(tǒng)參與緊急制動,結(jié)合ESP系統(tǒng),實現(xiàn)車輛的穩(wěn)定控制。
- 緊急制動:車輛行駛的過程中,EPB系統(tǒng)通過監(jiān)測輪速來判別車輛全4輪是否處于鎖死狀態(tài),此時,EPB系統(tǒng)可以和ABS 系統(tǒng)聯(lián)合作用,實現(xiàn)汽車制動的最優(yōu)控制,保障汽車行駛安全。
當(dāng)然這些功能的實現(xiàn)需要EPB與其他ECU進行信息交互,也要充分考慮車輛的狀態(tài)等信息,其控制邏輯比較復(fù)雜,如下示意其系統(tǒng)原理圖:

Source: 電子駐車制動系統(tǒng)(EPB)的組成和工作原理
3.3 EPB的實現(xiàn)方案
隨著汽車的電動化和智能化的快速發(fā)展,EPB的實現(xiàn)方案也在不斷更新。
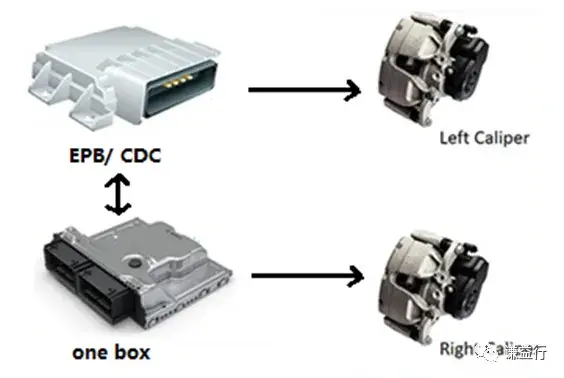
出于安全冗余等方面的考慮,正呈現(xiàn)出行車制動和駐車制動“合二為一”的趨勢。比如one box+EPB方案,即one box和EPB分別控制一個后輪端駐車執(zhí)行機構(gòu);或比如one box+底盤域控制器(CDC)方案,這時直接取消了EPB,即one box和CDC分別控制一個后輪端駐車執(zhí)行機構(gòu)。
當(dāng)然,如果電控機械制動系統(tǒng)EMB方案(即四個液壓輪缸被四個電機和卡鉗取代,制動指令傳輸?shù)捷喍穗姍C,電機控制卡鉗直接在輪端作用制動力)最終能成熟落地,那么將實現(xiàn)完全線控,這時就能正真將行車制動和駐車制動合二為一。
4 小結(jié)
到此本文就介紹了底盤域控的制動功能,即行車制動系統(tǒng)和駐車制動系統(tǒng)。

Source: 智能底盤技術(shù)(2) | 汽車制動系統(tǒng)的發(fā)展概述
來源:謙益行
-
線控
+關(guān)注
關(guān)注
0文章
15瀏覽量
6854 -
ESP
+關(guān)注
關(guān)注
0文章
184瀏覽量
33991 -
底盤控制
+關(guān)注
關(guān)注
0文章
9瀏覽量
9514 -
車規(guī)MCU
+關(guān)注
關(guān)注
0文章
61瀏覽量
1094
發(fā)布評論請先 登錄
相關(guān)推薦
汽車制動系統(tǒng)的基本功能和工作原理
智能底盤持續(xù)發(fā)展,底盤域MCU的國產(chǎn)機會

汽車底盤構(gòu)造圖
快裝小車服務(wù)器底盤測功機的功能
底盤智能化的關(guān)鍵技術(shù)探討 精選資料推薦
自動駕駛線控底盤VCU功能介紹
制動間隙自動調(diào)整臂在RB46 底盤上的應(yīng)用
底盤制動系構(gòu)造詳細圖解
一文了解昕銳與凱越的底盤區(qū)別

一文了解比亞迪G6底盤

自動駕駛之線控底盤新機遇
自動駕駛硬件之線控底盤
底盤域控制器(CDC)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論