 基于車輛運動學模型的控制方法
基于車輛運動學模型的控制方法


聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
車輛
+關注
關注
0文章
83瀏覽量
15194 -
運動控制
+關注
關注
4文章
587瀏覽量
32934 -
無人駕駛
+關注
關注
98文章
4088瀏覽量
120820
發布評論請先 登錄
相關推薦
LabVIEW的六軸工業機器人運動控制系統
。LabVIEW的可視化編程環境和強大的數據處理能力,使得復雜的運動學算法和軌跡規劃得以順利實現,顯著提高了工業機器人的控制精度和效率。
?
這是LabVIEW的一個功能介紹,更多的使用方法與開發案例,歡迎登錄官網,了解更多信息
發表于 12-21 20:03
基于FPGA和模糊控制的模型車運動學仿真
模型車運動學仿真系統是集硬件、軟件于一身的完整且復雜的系統,它在汽車駕駛模擬訓練領域的市場前景非常廣闊。但是,采用傳統的數學建模方法,很難得到精確而又簡單的數
發表于 09-11 16:23
?13次下載
基于回轉變換張量的6R機器人運動學研究
在牧野坐標系下建立了六自由度噴涂機器人的運動學模型,采用回轉變換張量法求出了該機器人的正逆運動學解析表達式。算法在VS.NET 平臺上用組件技術實現并仿真,仿真結果驗證
發表于 12-18 12:02
?15次下載

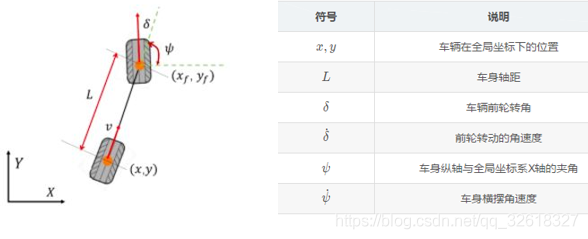
自動駕駛車輛控制(車輛運動學模型)
本文應配合b站up主“ 忠厚老實的老王 ”的 自動駕駛控制算法 系列視頻食用。文章目錄1. 兩個車輛運動學模型 1.1 三個坐標系 1.2符號定義 1.3
發表于 06-07 11:53
?0次下載

開源七軸myArm協作機械臂正逆運動學技術講解
引言: 在本文中,我們將深入探討機器人學的兩個核心概念:正運動學和逆運動學。這兩個概念是理解和控制機械臂運動的基礎。通過一個具體的7軸機械臂實例,我們將詳細介紹如何計算機械臂的正


基于車輛運動學和動力學模型的橫向控制算法
,因此,該方法比較適合應用于低速曲率較小的路徑跟蹤控制場景中。 基于運動學模型的橫向控制算法中,Pure Pursuit 和 Stanley
機器人運動學中的非完整約束與運動模型推導
機器人運動學中的運動學約束是指機器人在運動過程中受到的限制,包括位置、姿態、速度和加速度等因素。這些約束會對機器人的自由度產生影響,從而影響機器人的運動和






 工商網監
工商網監
評論