 MATLAB中的運動學機械臂算法
MATLAB中的運動學機械臂算法
MATLAB 在 2016 年就推出了 Robotics System Toolbox(RST),其中有很多關于機械臂方面的算法。而且隨著客戶需求的增加,也在加入一些新的功能。為了試圖讓讀者了解更多 RST 在機械臂方面的支持,讓我們來看一下機械臂方面的算法概貌。

這些名詞聽起來都比較深奧,但是在機械臂的世界里,這些都非常有用。
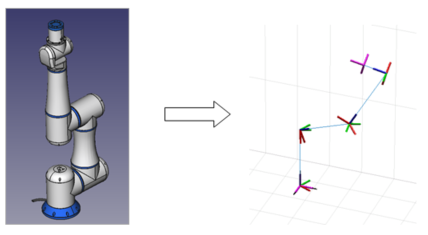
讓我們看一個簡單的例子。下圖是一個簡單的機械臂示意:機械臂的 end-effector(末端機構)受到 4 個旋轉關節和 3 個連桿的共同作用,可以到達不同的作業地點,也可以處于不同的旋轉角度。
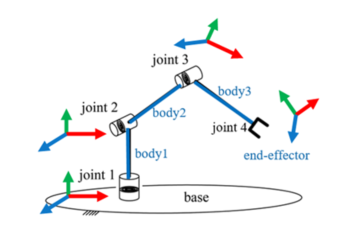
為了分析 end-effector 的具體位置和角度,我們看到:
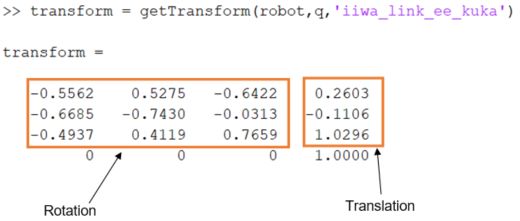
它相對底座開始,做了 4 次旋轉(rotation)和 3 次轉置(translation)。那這 4 此旋轉和 3 此轉置的總和,我們可以用一個矩陣來表示:
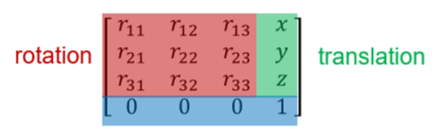
這個矩陣也叫 Homogeneous Transformation(齊次變換)。
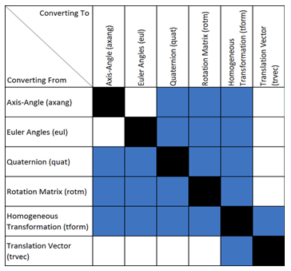
有時候,對于旋轉會有不同的表達方式,例如歐拉角(Euler Angles)、四元素(Quaternion)、旋轉矩陣(Rotation Matrix)等等;表達轉置,也可使用轉置向量(Translation Vector)。有了 RST 這些都可以輕松通過不同的函數進行互換。下圖為具體的函數列表:
例如:將歐拉角轉為Homogeneous Transformation:
>> eul = [0 pi/2 0];
tformZYX = eul2tform(eul)
tformZYX =
0.0000 0 1.0000 0
0 1.0000 0 0
-1.0000 0 0.0000 0
0 0 0 1.0000
由于機械臂的連桿長度是已知的,只要確定了各個關節轉動的角度,我們就可以確定 end-effector 的最終位置和方向。這個我們稱之為 forward kinematics(正向運動學)。反過來,如果我們知道了 end-effector 的最終位置和方向,我們也可以推導各個關節的角度,這個我們稱之為 inverse kinematics(反向運動學)。
機械臂關注的主要是反向運動學。
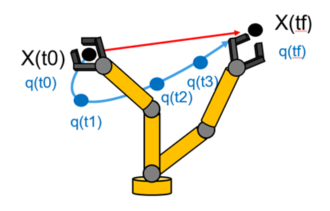
如果 end-effector,需要走一段比較長的路程(path),從甲點運行到乙點。我們為了使得機械臂的 end-effector 的路徑平滑,需要規劃一系列的路徑點(waypoints),這個我們叫做路徑規劃(trajectory planning)或者叫運動插補(interpolation)。例如下圖,藍色的曲線叫 path,而各個時間經過的路徑點叫 trajectory。如何設計經過這些路徑點的 trajectory,比較顯而易見的指標是 “平滑” 。那什么是“平滑” ,它可能意味著 “速度連續” 、“加速度連續” 、 “沒有頓挫” 等等。這些指標,都會轉化成數學算法。 RST 也會有相應的算法支持,作者將另外寫文章描述。
機械臂的關節位置我們一般用電機來驅動。電機通過產生力矩來轉動機械裝置,驅動機械臂。不同場合或者時機,需要的力矩不盡相同。
例如,機械臂水平放置的時候需要關節電機產生力矩來抵消地球引力;當機械臂需要迅速移動的時候,需要的力矩比緩慢移動的要大,當機械臂彎曲或者平展時候,重心發生變化,由于慣量(I = mr2)的不同,需要的關節力矩也不相同;另外,在很多場合,機械臂需要和人交互(collaborative robots),在碰到人體的時候,需要做出安全的保護動作,并對力矩進行調整。
這些需要考慮力矩的因素,我們稱之為動力學(dynamics)。和運動學類似,動力學分為正向動力學(forward dynamics)和反向運動學(inverse dynamics)。 RST 里支持兩種都有相應的 MATLAB 函數和Simulink block。作者也會另外寫文章詳細介紹 RST 關于動力學的部分。
運動學
1. Rigid Body Tree (剛體樹)
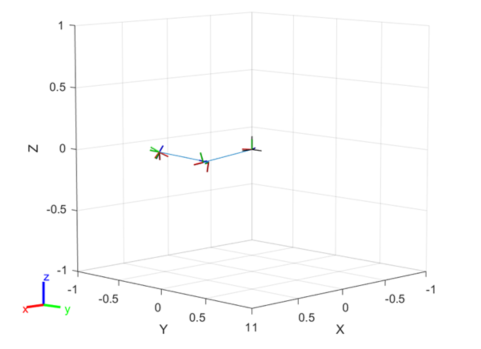
我們說研究運動學(主要是反向運動學),就是研究 end-effector 的位置改變會帶動各個關節的角度如何改變。RST 用 Rigid Body Tree 這樣一個對象,在這個對象上可以使運動學設計易用且可視化。下圖展示了機械臂的剛體樹樣例,可以在 MATLAB 界面中展示各個 body 的詳細參數。
一般來說,Rigid Body Tree 都是直接從機械臂的 CAD 文件或者 URDF(Unified Robot Description Format)文件導入。不過,也支持每個 body 的逐步添加。
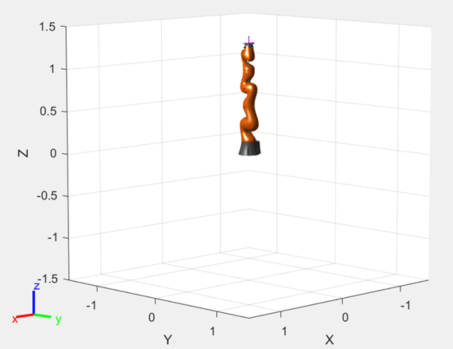
我們隨便敲幾行 MATLAB 命令:
robot = importrobot('iiwa14.urdf');
show(robot);
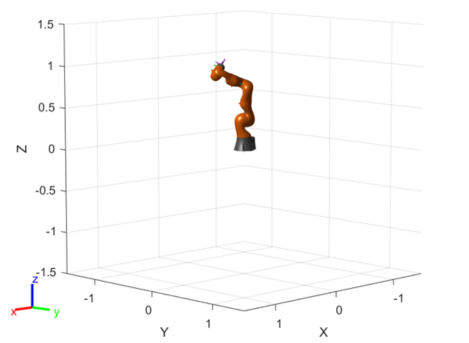
讓我們來改變一下機器人的各個關節角度(configuration),比如讓MATLAB自動給一個隨機角度配置,再看一下結果。顯然各個角度發生了變化。
q=randomConfiguration(robot);
show(robot,q);
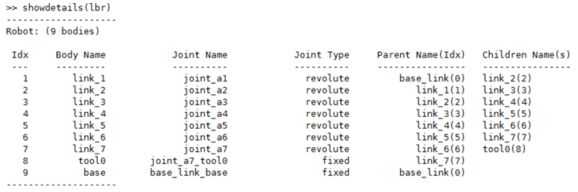
我們看看這個機械臂最末端的 end-effector 是什么?
showdetails(robot)

我們再看看 end-effector 相對機器人底座(base)的 Homogeneous Transformation(相對位置和角度)。
2. 反向運動學算法
反向運動學算法求解分兩種:一種是分析解法(Analytic solutions);一種是數值解法(Numerical solutions)。
MATLAB 用的是數值解法,可以理解為迭代尋優,或者近似解。
MATLAB 里面的反向運動學求解器(solver)有兩個:
Inverse Kinematics
Generalized Inverse Kinematics
兩者的區別是,后者比前者多了很多限制(constraints) 。例如end-effector的方向限制、機械臂各個關節的角度限制、位置限制等等。
我們先看一下比較簡單的 Inverse Kinematics:
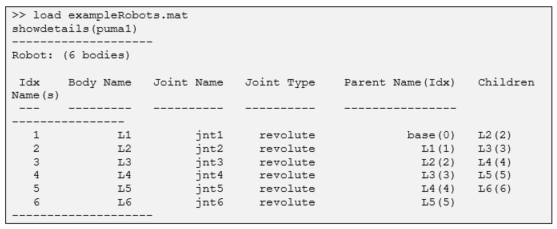
這是一個 6 軸機器人,end-effector 是 L6。

我們想要的最終結果就是下圖:
tform 是 L6 相對 base 的位置和方向(合稱 pose)。
下面的 MATLAB 代碼是計算出最終的各個關節的角度(configSoln),由于是用了迭代的數值解法,weights 為權重,initialguess 為給出一個初始估計。

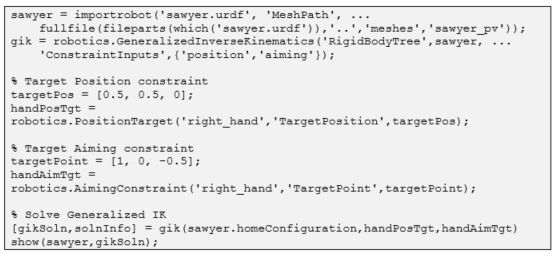
我們再看一下比較復雜的 Generalized Inverse Kinematics:
下面的代碼,做了這么幾件事情:
導入了一個 7 自由度的 rethink 機械臂— sawyer
設定反向運動學的求解限制— 例如機械臂的 end-effector 永遠指向地面的一個物體
對反向運動學進行求解
如果我們加一段 end-effector 位置變化后,調用這段代碼的動畫效果,你會發現 end-effector 的指向沒有變化 – 帶限制的反向動力學求解成功了:
3. Simulink 示例
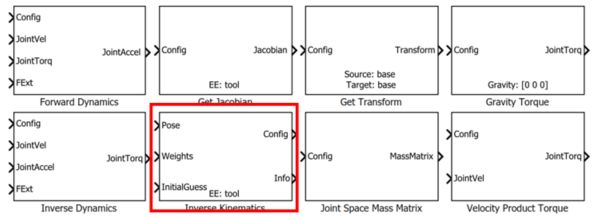
在安裝 RST 之后,Simulink 的 library 里就會出現幾個和機械臂(manipulator)相關的 block:
其中 Inverse Kinematics 就是反向運動學 block,其他的一些模塊顧名思義和動力學有關,在下一篇文章我會重點介紹。
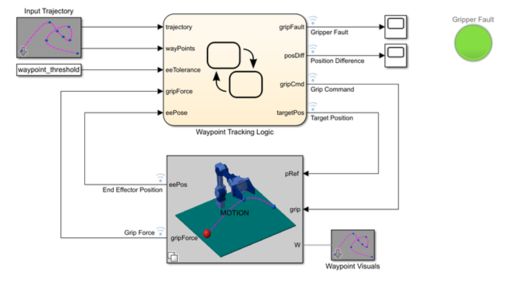
在 MATLAB Central File Exchange 上搜索 “Designing Robot Manipulator Algorithms”,這是一個基于 Simulink 和 Stateflow 的例子。我們先看一下運行結果:
這個例子展現了機械臂的 end-effector 抓了紅色物體,沿著規劃好的紫色 trajectory,進行運動。
下圖的 stateflow 狀態機是一個 trajectory tracking 的算法,它的作用是確保 end-effctor 沿著預設的 trajectory 運行。
狀態機下面的是運動控制部分和環境和物理模型。運動控制很簡單 – 直接計算反向運動學,將算好的關節角度交給物理模型去展現。物理模型構建也很簡單—— 用 SimScape 中的 SimMultibody 直接導入機械臂的 URDF 文件即可。
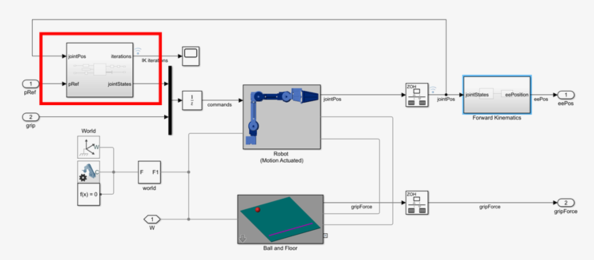
這里可以看到物理模型并沒有包含伺服電機,而是“透明傳輸”— 反向運動學的結果直接發給了機械模型去展現。實際上真實的運動控制器會將位置、速度、力矩指令通過伺服總線(例如 EtherCAT)發給每個關節的電機去執行,電機通過減速器去帶動機械結構。例如,一個 6 軸機械臂會有 6 個伺服電機,運動控制器會將運動過程解析為 6 個電機可以理解的位置、速度、力矩指令。
-
控制器
+關注
關注
112文章
16444瀏覽量
179045 -
機器人
+關注
關注
211文章
28632瀏覽量
207984 -
運動學
+關注
關注
0文章
8瀏覽量
7142
發布評論請先 登錄
相關推薦
如何使用PLC控制myCobot 320機械臂

深度解析!RK3568 加持機械臂是如何實現顏色識別與抓取的?

機械臂的高效運作,連接器起關鍵作用
【原創】 drawbot 平面機械臂scara寫字畫畫機器人DIY教程貼
OrangePi AIpro應用:機械臂應用開發指南

工業機器人和機械臂的設計、功能和應用有哪些區別?
奧比中光推出2.0版大模型機械臂
大象機器人開源協作機械臂機械臂接入GPT4o大模型!

國產Cortex-A55人工智能教學實驗箱_基于Python機械臂跳舞實驗案例分享
干貨!國產Cortex-A55人工智能實驗箱機械臂積木搬運實驗案例
基于六維力傳感器的機械臂自動裝配應用

自然語言控制機械臂:ChatGPT與機器人技術的融合創新(下)

機械臂技術的前沿探索:年度案例回顧!






 工商網監
工商網監
評論