") 關(guān)于【尋跡智行】激光導(dǎo)航AGV運(yùn)行場地以及網(wǎng)絡(luò)信息要求
關(guān)于【尋跡智行】激光導(dǎo)航AGV運(yùn)行場地以及網(wǎng)絡(luò)信息要求
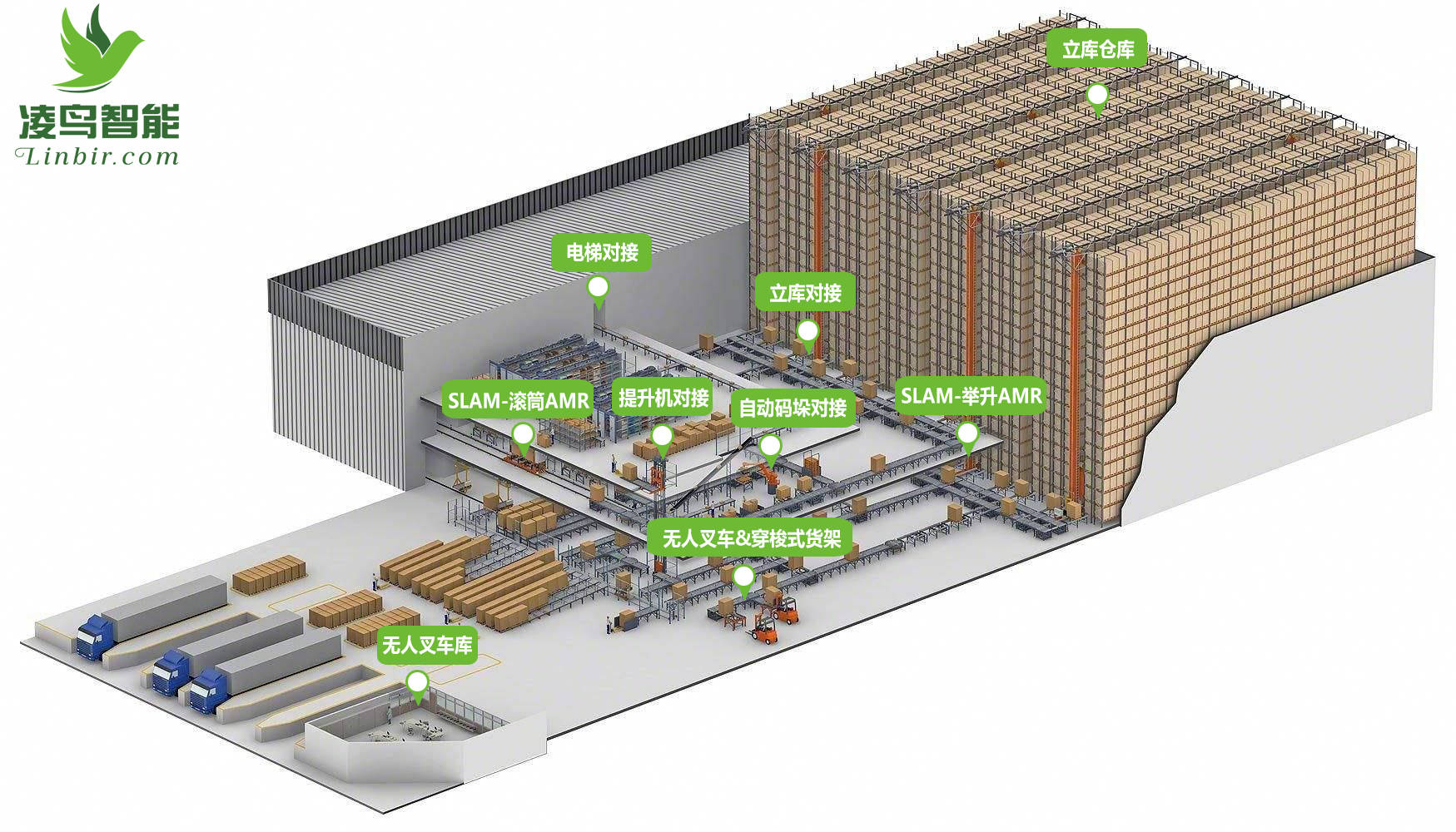
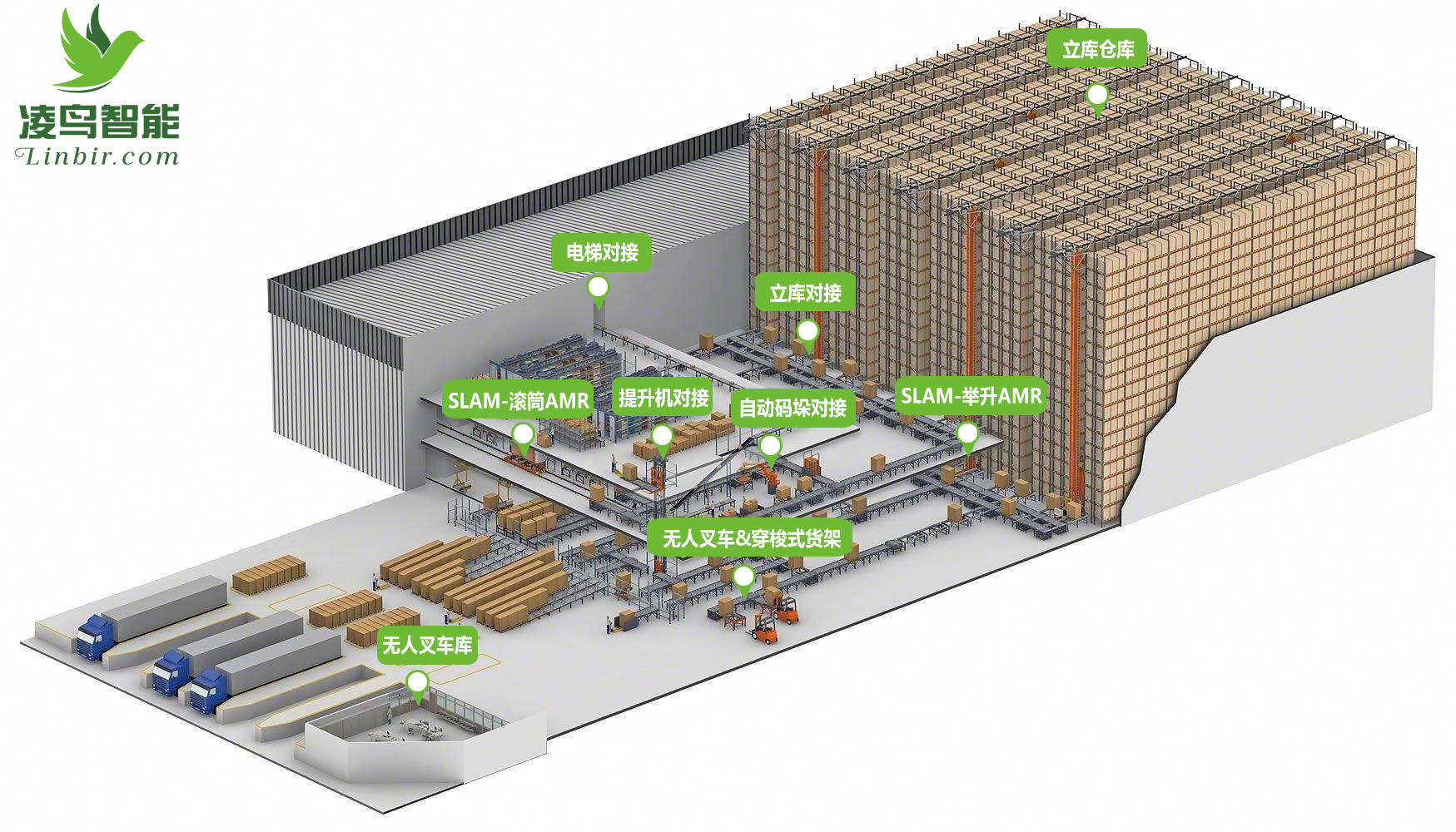
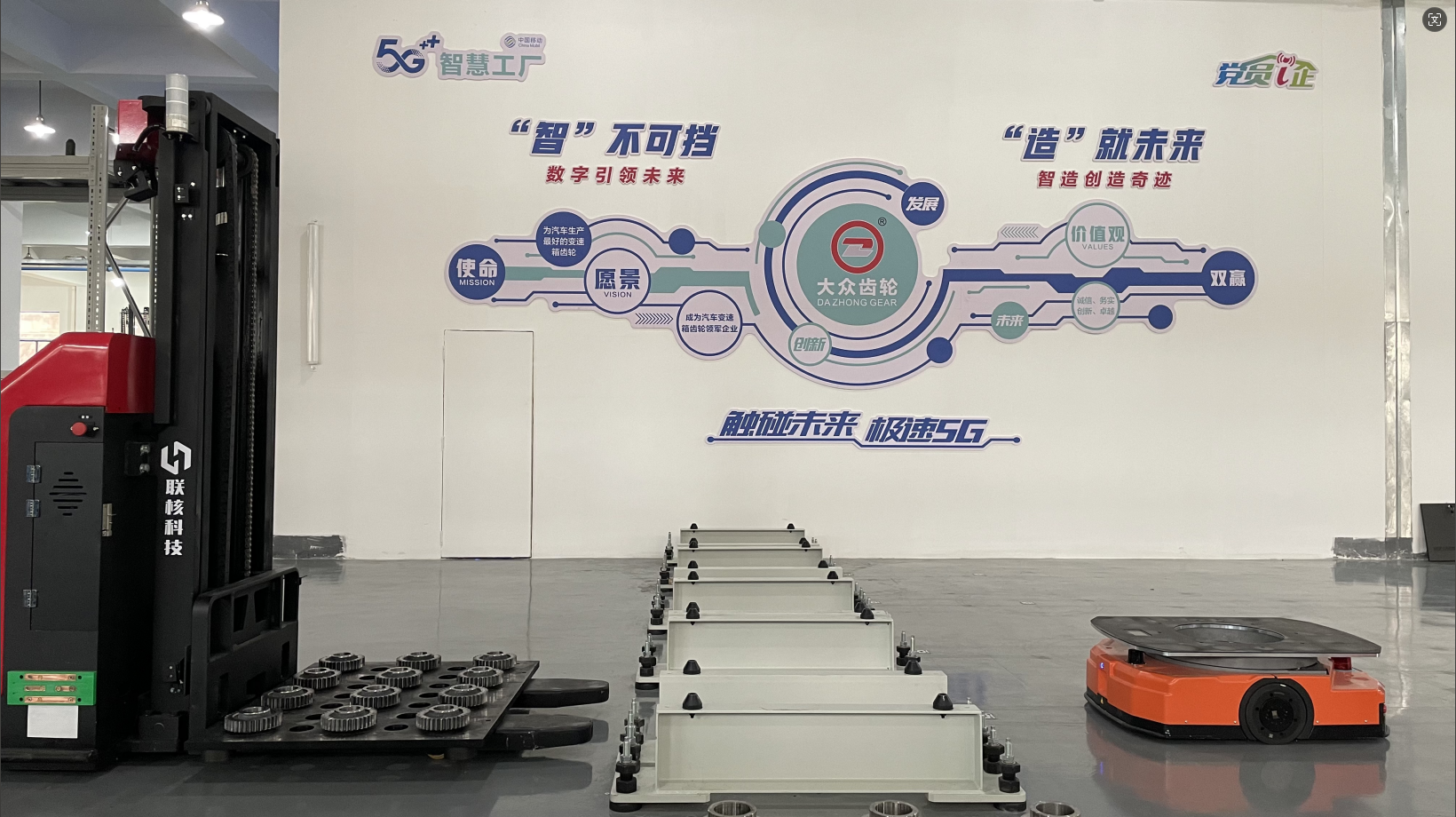
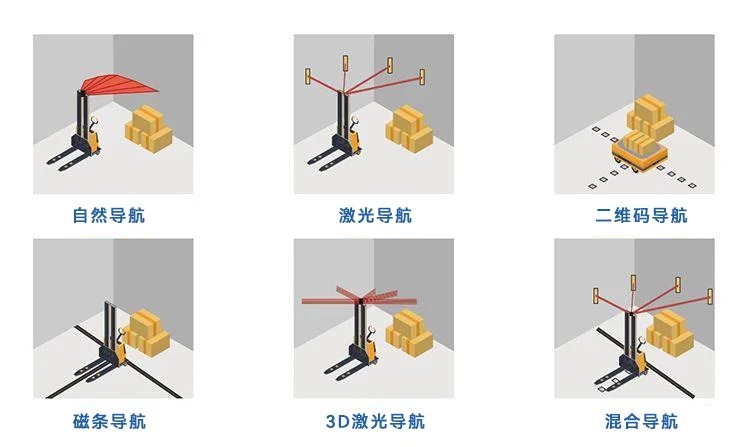
AGV自動導(dǎo)引運(yùn)輸車在市面上已經(jīng)是一款成熟的無人搬運(yùn)車了,它早在制造業(yè)中大顯身手,高效、準(zhǔn)確、靈活地完成物料的搬運(yùn)任務(wù),實(shí)現(xiàn)智能化的無人倉儲。尋跡智行坐落于蘇州市相城區(qū),是一家專門以激光SLAM為基礎(chǔ)的多模融合導(dǎo)航技術(shù)的AGV移動搬運(yùn)機(jī)器人廠家,下面就近期客戶發(fā)出的疑問,對AGV運(yùn)行場地要求以及網(wǎng)絡(luò)要求做一個說明。

尋跡智行AGV運(yùn)行場地
一、AGV運(yùn)行場地要求 [ 使用條件要求(GBT 20721-2006)]
1) 起伏程度
當(dāng)AGV運(yùn)行的路面起伏程度在最大允許值以下時,AGV應(yīng)能實(shí)現(xiàn)可控的額定速度行駛,起伏程度定位為在基準(zhǔn)范圍內(nèi)的最高高度與最低高度之差。起伏程度在1㎡范圍內(nèi)最大允許值應(yīng)≤3mm。
注:AGV運(yùn)行地面要求整潔,不能有顆粒和臟東西,并且地面不能打滑。
2) 路面坡度
路面坡度(H/L)定義在100mm以上的長度范圍內(nèi),路面水平高度差與路線長度的最大比值。當(dāng)AGV運(yùn)行的路面坡度在最大允許值以下時,AGV應(yīng)能實(shí)現(xiàn)可控的額定速度行駛。路面坡度的最大允許值需≤0.05,對AGV需精確定位的停車點(diǎn),必須≤0.01。
3)臺階高度
臺階高度在100mm以內(nèi)的長度范圍內(nèi),路面水平高度差的最大值。當(dāng)AGV運(yùn)行的路面臺階高度在最大允許值以下時,AGV應(yīng)能實(shí)現(xiàn)可控的額定速度行駛,但AGV停車位置不允許出現(xiàn)臺階。臺階高度的最大允許值需≤5mm。
4)溝寬幅度
溝寬幅度為當(dāng)AGV運(yùn)行路面溝寬幅度在最大允許值以下時,AGV應(yīng)能實(shí)現(xiàn)可控的額定速度行駛,但AGV停車位置不允許出現(xiàn)溝槽。路面溝寬幅度的最大允許值需≤5mm,當(dāng)溝寬幅度大于最大允許值時,按臺階高度進(jìn)行要求。
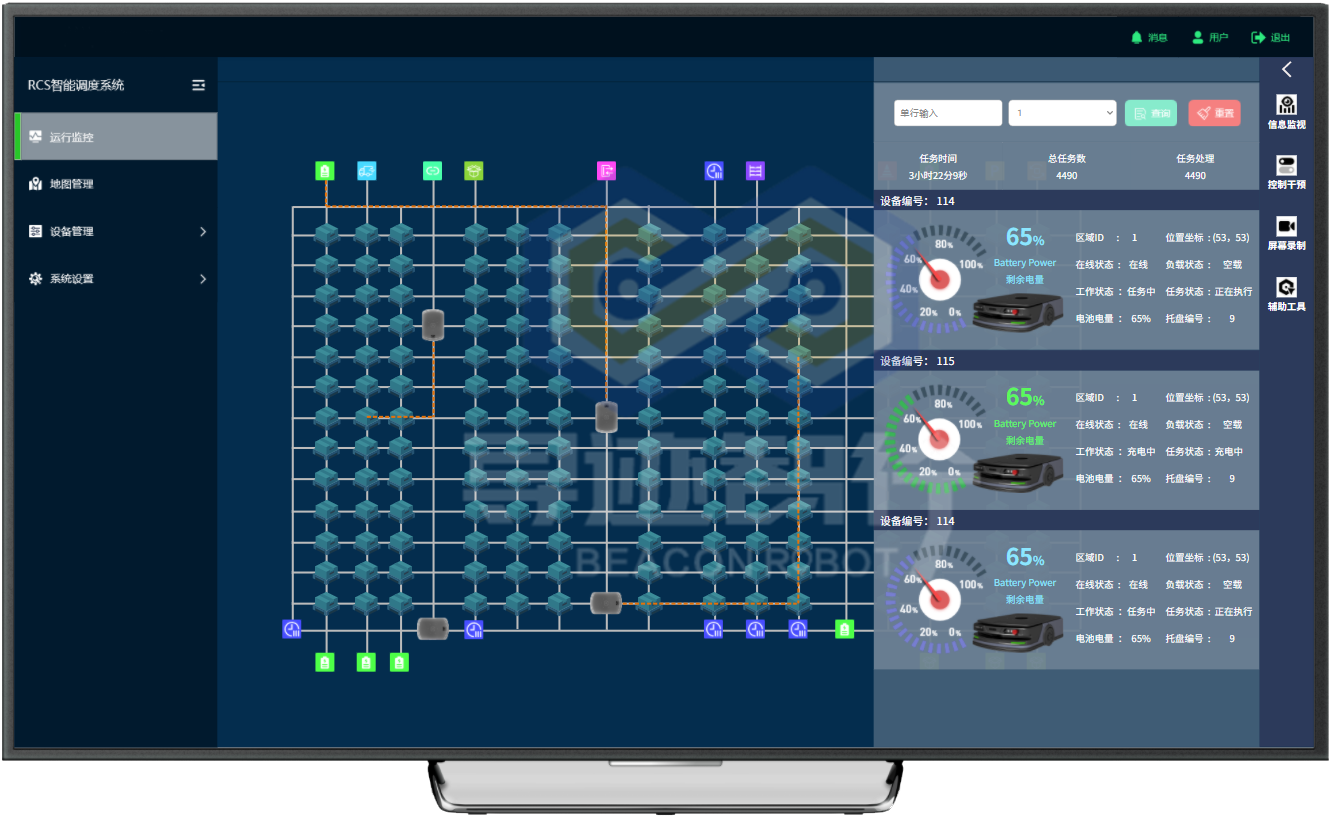
尋跡智行調(diào)度系統(tǒng)界面
二、AGV網(wǎng)絡(luò)要求(由乙方負(fù)責(zé)設(shè)備采購、安裝調(diào)試、售后服務(wù))
1) 無線接入點(diǎn)(AP)支持802.11ac/b/g/n協(xié)議。
2) AGV運(yùn)行區(qū)間WIFI信號全覆蓋,無信號盲區(qū)。
3) 通訊響應(yīng)時間平均20m/s。
4) 現(xiàn)場無線覆蓋需要開啟WIFI2.4G/5.8G網(wǎng)絡(luò),信道應(yīng)與其他網(wǎng)絡(luò)信號信道交錯,避免同頻干擾。
5) AGV運(yùn)行線路的無線覆蓋強(qiáng)度需要≥-75dbm,S/N(信噪比)需要≥30dbm。
6) 需要提供一個覆蓋全場的獨(dú)立專用網(wǎng)絡(luò)或單獨(dú)的SSID,該SSID需要在同一IP網(wǎng)段內(nèi),最好是能劃分專用VLAN。中央控制主機(jī)需要提供網(wǎng)線接入,中控主機(jī)所在網(wǎng)段與AGV專用SSID同屬一個網(wǎng)段,所劃分的AGV專用VLAN或共享網(wǎng)段請與辦公網(wǎng)/業(yè)務(wù)網(wǎng)隔離,且不要在該段中配置各種訪問策略/上網(wǎng)認(rèn)證,避免阻斷AGV通訊包和端口通訊。
7) 所有無線接入點(diǎn)(AP)設(shè)備需要同一型號,以便于無線漫游的進(jìn)行。
8) 所有無線接入點(diǎn)(AP)需要保證無線信號強(qiáng)度符合要求的同時,也必須將AP安裝在無遮擋的位置,以便AP與AGV通訊不受金屬障礙物影響。
9) 無線接入點(diǎn)(AP)設(shè)備必須支持至少30個用戶數(shù)的接入,避免因AP接入負(fù)荷大而導(dǎo)致AGV無法正常接入。若能夠通過WLC統(tǒng)一管理效果更優(yōu)。
10) 測試AGV接入無線網(wǎng)運(yùn)行持續(xù)4小時的ping包情況,需要保證在1000字節(jié)/pkg的連續(xù)ping包下,丟包率必須≤1%。ping包過程不能出現(xiàn)超過2個的連續(xù)丟包。
注:地面無痕需求NG說明
地面痕跡形成原因:AGV輪壓灰塵,加上AGV行走線路為固定線路,AGV輪的著力軌跡高度重合,痕跡的產(chǎn)生無法避免,參考我司以往項(xiàng)目經(jīng)驗(yàn),可在延遲地面痕跡產(chǎn)生時間上考慮,如:
1)在AGV底板加裝觸地毛刷,可使得AGV輪子經(jīng)過之前,通過毛刷刷走部分灰塵,減少AGV輪在運(yùn)行過程中附著灰塵;
2)定期清理地面、AGV輪表面;
3)地面材質(zhì)選擇:防靜電地板與防靜電地坪,參考我司某客戶車間案例,建議選擇PVC防靜電地坪,AGV在防靜電地坪上運(yùn)行,地坪定期清潔、打蠟保養(yǎng)、保持整潔,可有效延緩輪痕出現(xiàn)。
審核編輯黃宇
-
激光
+關(guān)注
關(guān)注
19文章
3249瀏覽量
64732 -
AGV
+關(guān)注
關(guān)注
27文章
1331瀏覽量
41199 -
尋跡智行
+關(guān)注
關(guān)注
0文章
51瀏覽量
99
發(fā)布評論請先 登錄
相關(guān)推薦
無軌激光AGV移動機(jī)器人如何構(gòu)建地圖?
AGV網(wǎng)絡(luò)布線工程標(biāo)準(zhǔn)
AGV小車的工作原理是什么?
AGV激光導(dǎo)航定位技術(shù)綜述與發(fā)展趨勢

如何選擇讓自己滿意(適合)的agv小車?純干貨分享
AGV激光導(dǎo)航定位技術(shù)與構(gòu)建地圖

智能呼叫、激光導(dǎo)航、自動避障,為什么AGV機(jī)器人被需要?

agv叉車激光導(dǎo)航和二維碼導(dǎo)航有什么區(qū)別?適用什么場景?選哪種比較好?
室外牽引AGV:慣性測量+衛(wèi)星定位+激光雷達(dá),我全都要!

agv叉車怎么運(yùn)行的?速度受哪些因素影響?有哪些不確定因素?

視覺系統(tǒng)輔助引導(dǎo)在激光導(dǎo)航AGV中應(yīng)用
Agv叉車由什么構(gòu)成?工作原理是什么?易損件有哪些?
喜訊!尋跡智行榮獲“金力獎”之“AGV/AMR創(chuàng)新及應(yīng)用獎"

尋跡智行助力某航天研究所物流自動化升級項(xiàng)目完美驗(yàn)收~
激光,磁性,視覺?什么是AGV最好的導(dǎo)航系統(tǒng)?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論