 agv叉車激光導航和二維碼導航有什么區別?適用什么場景?選哪種比較好?
agv叉車激光導航和二維碼導航有什么區別?適用什么場景?選哪種比較好?
無人叉車激光導航和二維碼導航在多個方面存在顯著差異,以下是它們的主要區別:
一、原理不同
激光導航:利用激光雷達掃描地面環境,實時獲取機器人當前位置和周圍環境信息,然后根據事先建立的地圖進行自主導航。激光雷達通過發射激光束,并利用光束的反射時間和角度來計算物體的距離和位置,從而生成環境地圖,并發送給控制系統進行處理。
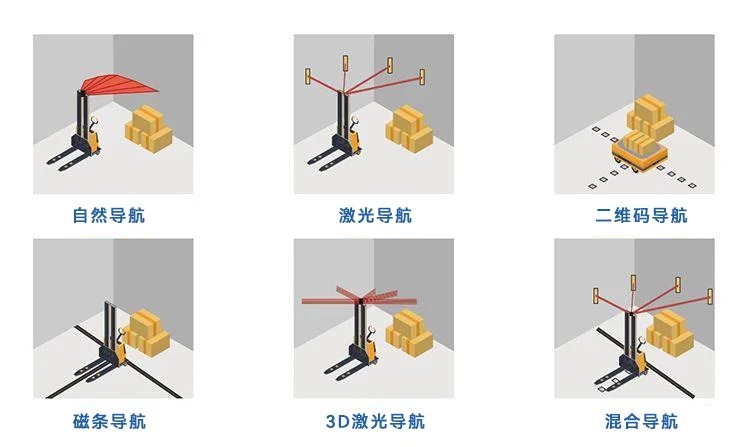
二維碼導航:在地面布置二維碼標記,機器人通過識別二維碼標記進行定位和導航。機器人通過掃描這些二維碼標簽,可以明確自己在特定區域內的具體位置,從而更加準確地執行搬運任務。
二、使用場景不同
激光導航:適用于大型的、固定的場所,如倉庫、物流中心等。這些場所通常面積較大,布局復雜,需要高精度的導航和定位能力。
二維碼導航:適用于小型的、靈活的場所,如超市、商場等。這些場所通常面積較小,布局相對簡單,且需要更經濟的導航解決方案。
三、精度和穩定性不同
激光導航:定位精度和穩定性較高,可以達到毫米級別。由于激光導航能夠實時感知周圍環境并生成地圖,因此能夠更準確地規劃路徑和避障。
二維碼導航:定位精度和穩定性相對較低。雖然二維碼標簽可以提供一定的定位信息,但受限于標簽的布置密度和識別精度,其整體導航精度和穩定性不如激光導航。
四、技術難度和成本不同
激光導航:技術難度和成本相對較高。激光導航需要專業的設備和技術支持,包括激光雷達、傳感器、計算機控制系統等。同時,由于需要事先建立地圖并進行路徑規劃,因此還需要專業的技術人員進行調試和維護。
二維碼導航:技術相對簡單,成本也相對較低。二維碼導航主要依賴于地面布置的二維碼標簽和機器人上的攝像頭或傳感器進行識別。因此,其設備成本和維護成本都相對較低。
審核編輯 黃宇
-
AGV
+關注
關注
27文章
1316瀏覽量
41140 -
激光導航
+關注
關注
0文章
48瀏覽量
5695
發布評論請先 登錄
相關推薦
哪種二維碼掃描器適合生產線應用?

掃手機和紙張二維碼的掃碼頭:選擇與應用指南

工業級二維碼掃描模組有哪些特點?

工業二維碼讀碼器在電子制造業中的應用

二維碼識讀設備有哪些類型
二維碼掃描頭設備嵌入到閘機上,實現掃手機屏幕碼完成簽到簽退

如何為柜式終端設備選配(集成)二維碼模塊?

如何選擇一維二維條碼采集器,哪種PDA采集器比較好?

二維碼掃碼器/二維碼讀取設備嵌入園區閘機系統中的應用

怎么在Framewin里顯示二維碼?
遠距離二維碼掃描器如何選擇?看看以下三款遠距離二維碼掃碼模塊
Labview調用Halcon識別二維碼
怎樣快速選擇二維碼掃描儀模組






 工商網監
工商網監
評論