 4D成像雷達能否替代毫米波雷達?
4D成像雷達能否替代毫米波雷達?
如果沒有雷達,一臺自動駕駛車要如何穿透黑暗?
當人們對智能駕駛展現出前所未有的熱情時,雷達從教科書中走了出來。如同所有新事物一樣,車載雷達也有一段被排斥、被質疑的心酸過往。直到今天,它成為智能駕駛的標配硬件。
比起攝像頭的直觀所見,雷達更偏向于“感受”。這樣一雙“車眼”不斷分化、進化,花名越來越多,內部的明爭暗斗也更勝以往。比如:誰和誰搭配干活效果更好,怎么搭、如何安排位置才最合適。
而這里始終有一個主題,誰配站C位?是視力更好的激光雷達,還是不挑時間全天候工作的毫米波雷達?就像歌手陶喆唱的那樣“你愛我還是他,是不是真的他有比我好,你為誰在掙扎……”
不出意外,答案是第三者。
是“冷門”配置 還是C位出道
一個名叫4D成像雷達的角色攪亂了這一池春水。
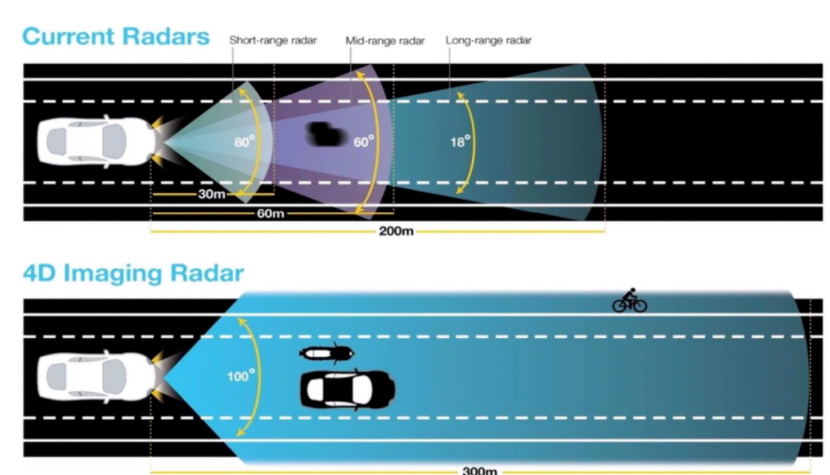
即將上市的飛凡R7在做功課預告時,為不溫不火的4D成像雷達添了一把熱度。官方介紹,飛凡R7國內首發Premium 4D成像雷達,最遠探測距離達到350米,甚至可以采集前前車的行駛狀態數據。
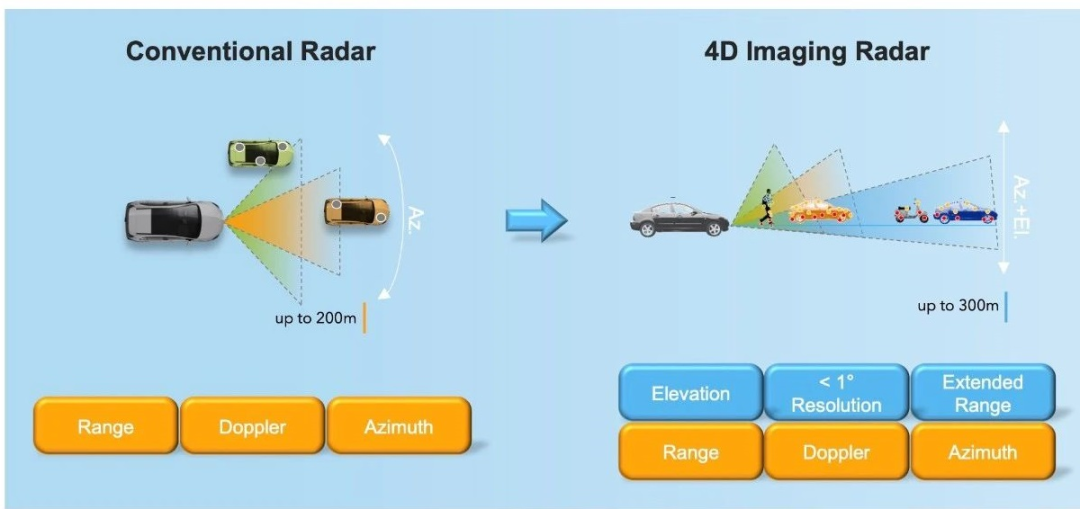
通常連普通窨井蓋和路標都分不清楚的毫米波雷達,探測目標竟然可以貫穿兩輛車?這一說法是否言過其實,還有待驗證。目前市面上廣泛采用的3D毫米波雷達不僅無法進行目標分類,在測距上較激光雷達也是差上許多,而后者在惡劣天氣下顯得力不從心。
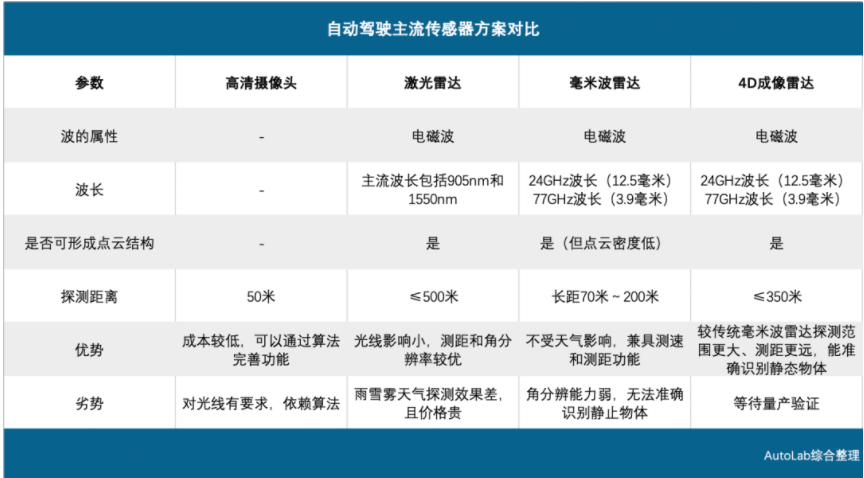
4D成像雷達算得上是毫米波雷達的進階版本,在距離、速度、方向角的基礎上多了一個高度探測值,不僅提高了視力,探測范圍和分辨能力都有所增強。另外,4D成像雷達的成本大概只有激光雷達的10%~20%。
因此每日汽車電訊認為,4D毫米波成像雷達既從性能上解決了傳統毫米波和激光雷達的不足,又滿足了價更低更容易量產這一規律。如果量產驗證的效果好,未來不排除吃下激光雷達的部分市場份額。
按照恩智浦ADAS產品線總經理Steffen Spannagel的說法,成像雷達正處于發展早期,但未來性能有望大幅提升。理想狀態下,成像雷達最終可能會取代激光雷達。
這是全球汽車雷達龍頭廠商的觀點,但比起不斷打破爭議的激光雷達,4D成像雷達確實要更冷門一些。IDC的一組數據表明,今年第一季度L2級自動駕駛在乘用車市場的新車滲透率為23.2%,與Robotaxi產業發展相比,乘用車市場仍然聚焦于輔助駕駛功能。換句話說,4D成像雷達上車難免有點大材小用。
到2030年,L2+自動駕駛汽車預計會占據汽車總產量的近50%。彼時約有一半的車輛擁有接近解放雙手的自動駕駛能力,如果以L2+或L3~L5級自動駕駛為前提,4D成像雷達可能會剛剛好。
尤其L3級及以上的自動駕駛系統支持解放雙手,車身雷達的可靠性更加重要。這也是為什么L3級以上的傳感器都會選用一些成像雷達。試想一下,一輛啟動了自動駕駛模式的車輛在高速路上行駛,突遇一場大霧或者大雨,攝像頭發揮不了作用,激光雷達的探測精度再高也等同于半塊廢鐵。這時,4D成像雷達的“火眼金睛”就可以派上用場。
事實上,越來越多的觀點認為,4D成像雷達將會成為自動駕駛最核心的傳感器。例如在Mobileye的計劃里,未來乘用車將只需要一顆前向激光雷達和一顆360度全包覆車身的毫米波雷達。或許未來,行業不用再為雷達的布置而絞盡腦汁了。
從這個角度講,飛凡R7的自動駕駛功能確實可以期待一下。至于4D成像雷達,它的“進化史”也在持續更新中。
4D不止多了一個度 進化大有乾坤
在技術趨勢上,一些廠商已經開始從24GHz(12.5mm)轉向研發綜合性能更好的77GHz(3.9mm)毫米波雷達產品。波長越短,意味著角分辨率越高,獲得的點云圖密度越高,成像就越精準。
同時77GHz的4D毫米波成像雷達更適合長距探測,體積也可以做到更小,提高了車型設計的靈活度。國際上,恩智浦、大陸、博世、安波福、采埃孚等Tier1基本完成對該領域的布局;國內包括隼眼科技、華域汽車、華為、為升科科技(臺灣)等公司也紛紛推出了77GHz的4D成像雷達解決方案。
根據Yole Développement的測算,4D雷達市場規模將從2021年的3億美元增長到2025年的35億美元,期間成像雷達的市場將從1億美元增加至43億美元,年復合增長率為109%,遠高于汽車雷達市場整體增長水平。毫無疑問,接下來幾年雷達市場的剿殺將異常激烈。
4D成像雷達是否會勝出,除了取決于產品本身的競爭力外,適配芯片的規格也十分關鍵。畢竟上層建筑好不好,地基占很大的權重。4D成像雷達一般包含射頻前端MMIC、數字信號系統DSP和后端算法等主要硬件。“4D成像雷達的發展趨勢有一個明顯特征是,前端會有更多通道,后端會有更強的算力需求”,隼眼科技CTO張慧這樣說。
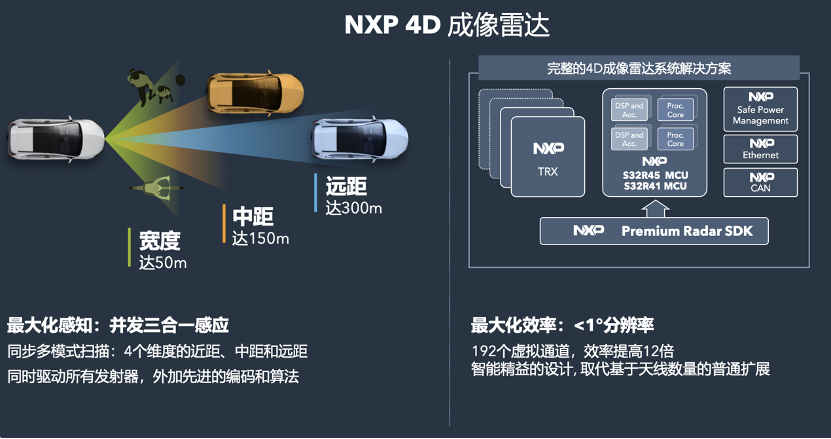
簡單理解,前端收發通道數量越多,提供點云數據的能力就越強,識別物體會更加精準。當下主流的車載4D成像毫米波雷達多是通過2片MMIC芯片級聯,實現48個通道(6發8收)。增加通道數,意味著要增加更多的芯片級聯。
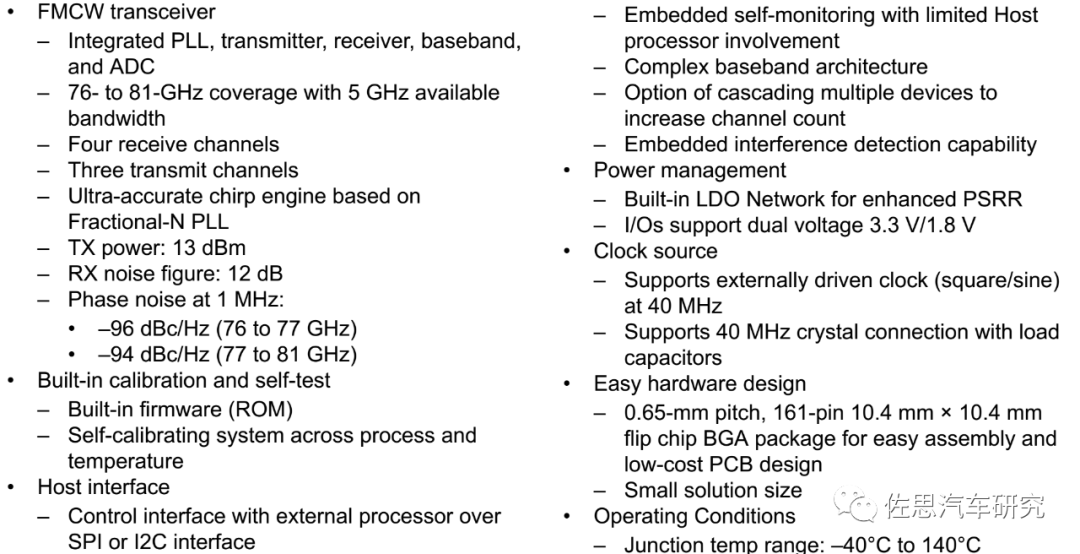
此外,4D成像雷達的一個發展趨勢是與人工智能技術的融合更深了。當毫米波雷達和深度學習得到的信息相融合時,會產生大量的算法需求,這也對處理器提出了更高要求。處理器的性能極大決定了雷達前端和后端的使用效果。相比于通過增加天線數量提高分辨率的傳統方法,芯片級聯逐漸受到行業認可。恩智浦在今年早些時候推出的S32R45、S32R41成像雷達處理器,采用16nm制造工藝,是業內為數不多能夠勝任高達4片MMIC芯片級聯的產品。在高達12發16收等效192個虛擬通道算力的需求下,據稱S32R45一片就能搞定。
事實上,車載雷達芯片和手機應用處理器一樣都遵從摩爾定律的發展,也就是說,車載雷達芯片也會向更先進技術節點(如7nm)和更集成的方向發展。不過,對于角雷達這類不需要較強分辨力或成像能力的產品,現階段的技術水平已經能滿足所需。
目前恩智浦正在開發第六代雷達芯片,具體規格還沒公開。不過在提供芯片之余,恩智浦還提供雷達的軟件算法,從軟件層面提升雷達的角分辨率,同時解決車與車之間雷達工作產生的干擾問題。
4D成像雷達在傳統3D毫米波雷達基礎上不止多了一個探測維度,目前技術的迭代與升級似乎還不是最理想的狀態。為升科科技CTO蔡青翰也說,目前毫米波雷達發展到4D雷達或4片級聯雷達,遠遠沒有走到雷達所能達到的盡頭。傳統毫米波雷達最大的缺點在于角分辨率不足,如今分辨率提上來了,若再繼續通過芯片級聯的方式提高分辨率,邊際效益明顯會打折扣。
他提出一點,4D成像雷達更突出的問題是動態范圍的不足。以目前4片級聯技術來看,要做出一款對環境感知更強的車載傳感器,動態范圍還有很大提升的空間。比如在反射性能較差的介質中,雷達的動態范圍可以確保必要的靈敏度。
動態范圍其實也很好理解,以相機為例,動態范圍越大,捕捉到的高光區和陰影區的圖像就越充滿細節。譬如最近幾年,手機行業已經開始關注相機的AI 降噪與 HDR 融合。如果4D成像雷達解決了這一問題,未來會不會是雷達為主攝像頭為輔呢?
-
雷達芯片
+關注
關注
1文章
42瀏覽量
12767 -
自動駕駛
+關注
關注
784文章
13852瀏覽量
166579 -
毫米波雷達
+關注
關注
107文章
1048瀏覽量
64418
發布評論請先 登錄
相關推薦
擁抱自動駕駛,4D成像毫米波雷達已悄然崛起!
4D成像雷達專欄 | 4D高分辨毫米波雷達概述

剖析如何做好一款4D高分辨毫米波雷達

傲酷雷達推出商用4D成像毫米波雷達 ST推出汽車衛星導航芯片
什么是4D毫米波雷達?
4D毫米波雷達加速了4D成像系統的可能性
4D毫米波雷達市場技術盤點
經緯恒潤新產品系列 | 4D成像毫米波雷達

對比ZF和特斯拉的4D毫米波雷達設計,國產4D毫米波雷達迅速崛起






 工商網監
工商網監
評論