 4D成像雷達專欄 | 4D高分辨毫米波雷達概述
4D成像雷達專欄 | 4D高分辨毫米波雷達概述
本文首發于公眾號【調皮連續波】,其他平臺為自動同步,內容若不全或亂碼,請前往公眾號閱讀。保持關注調皮哥,和1.6W雷達er一起學習雷達技術!
【正文】
編輯|雷達小助理 審核|調皮哥
1、概述
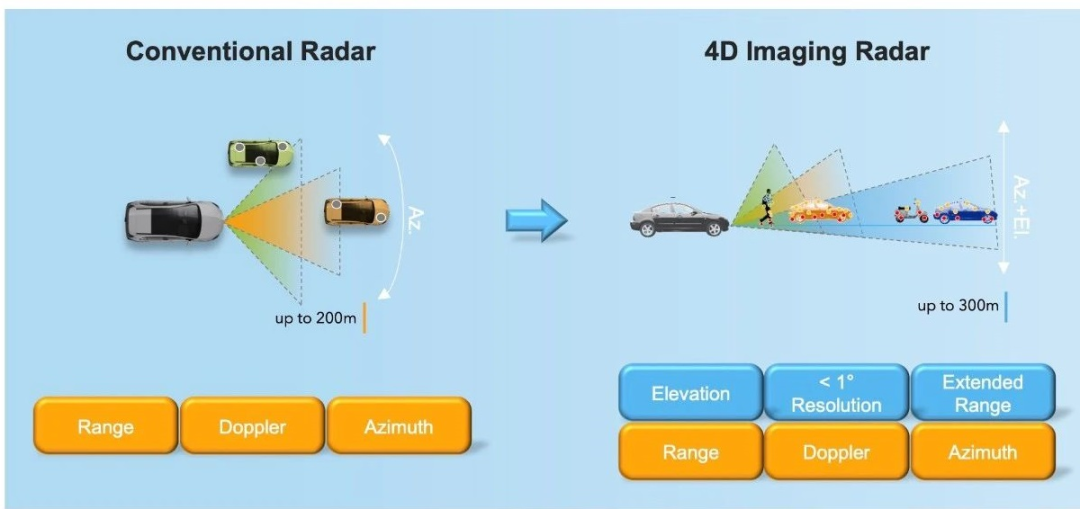
4D高分辨毫米波雷達(4D High Resolution Radar),也叫做4D成像毫米波雷達,簡稱4D成像雷達。不論是傳統毫米波雷達(mmWave Radar),還是4D成像雷達,或者是其他汽車上使用的雷達,都可以統稱為汽車雷達。
4D指的是距離(Range)、速度(Velocity)、水平角度(Azimuth)和俯仰角度或高度(Elevation)四個維度的信息,但極少數雷達廠商為了吸引投資者眼球,在4D的基礎上增加上雷達散射截面積(Radar Cross Section,RCS)、微多普勒(Micro-Doppler)或者其他維度信息,自稱5D成像雷達。不過業內一般僅提4D成像雷達,把RCS、微多普勒等信息當作目標的特殊屬性提取特征,并采用機器學習模型實現目標分類(Classification)。上述的每一個維度的信息獲取,都是4D成像雷達的一個子課題或者關鍵技術,后續會慢慢提及這些關鍵技術。
雖然,在未來4D成像雷達將承擔自動駕駛關鍵傳感器的角色,如360°環視感知、行泊一體、全自動駕駛等,但目前(2023年5月)4D成像雷達還沒有大規模使用,用于車載的雷達仍舊以低成本的傳統前向雷達為主。
現代雷達是一個龐大且復雜的系統,涉及天線、射頻、信號處理、數據處理等“軟硬算測”等多方面的內容,而毫米波雷達麻雀雖小但五臟俱全,其復雜程度沒有半點降低,且面對的場景更加復雜。對天的軍事雷達工作環境背景比較干凈,但其模式比較復雜(如搜索、跟蹤、監視、導引)。
目前,車載4D成像雷達工作模式可以說比較單一,即使目前的車載前向雷達可以具備多模功能,可同時探測“遠中近”的目標。但在城市道路十分復雜的環境背景,存在多徑干擾和目標形態各異等原因,要做好一款4D成像雷達并不簡單。可以說很多事情都是摸著石頭過河,并不是光砸錢就能解決的,而未來汽車雷達也可能具備復雜的工作模式。
本文主要介紹4D成像雷達的一些實現技術和可以拓展的功能,毫米波雷達未來的發展趨勢是:小體積、低功耗、高實時性(低算力)、低成本、多模式、高分辨、智能化、全方位感知。更進一步說,目前在硬件趨于同質化的情況下,如果沒有新的技術從底層硬件材料或者信號處理算法上得到突破,那么未來的雷達將在智能化方面聯合人工智能(AI)算法,增強雷達的數據處理以及目標識別與分類的能力。但前提是,底層信號處理鏈路提供的點云能夠保質保量,正所謂:兵不在多,而在精。
2、高分辨點云
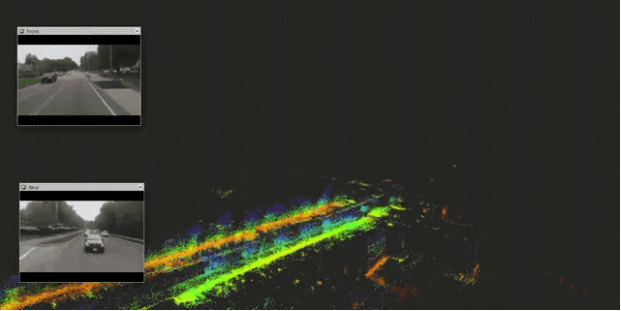
與傳統毫米波雷達相比,4D成像雷達的優勢就是高分辨,即讓目標在距離維度和角度維上的分辨率更高,得到的散點簇(Cluster)數量是傳統毫米波雷達的數十倍,根據目前雷達企業的產品指標一般每秒(15~20幀)數萬個點。如此密集的散點簇組合后被稱為點云(Point cloud),點云能夠在一定程度上體現目標的輪廓,達到“成像”的效果,這就是4D成像雷達4D Imaging Radar)的由來,但和激光雷達(Lidar)、合成孔徑雷達(SAR)相比還遠遠不夠。
前面提到,一味追求點云數量并非明智之選,還需要保證點云的質量。點云數量多實時性難以保證,冗余的點云信息其實沒有用。也就是說需要在保證點云質量的基礎上,提高點云的數量,即使數量少一些也要保證質量。
4D成像雷達最具優勢的特點就是提供高質量的點云,高質量的點云卻極大地擴展了毫米波的應用范圍,傳統毫米波雷達只能在ADAS(L2和L3級別的自動駕駛)中使用。而4D成像雷達的推出,為毫米波雷達家族(前向、后向、側向、角雷達、艙內活體檢測、360環視感知)進入高級無人駕駛提供入場券,可與攝像頭、激光雷達、超聲波雷達同分一杯羹了。
3、4D成像雷達功能
4D成像雷達下述的功能,使其更進一步獲得與激光雷達和相機相提并論的資格。
(1)360環視場景感知
(2)自動泊車(APS)或行泊一體化
(3)可行駛區域檢測(Freespace)
(4)目標分類(Classification)
(5)目標局部定位(Locallization)
(6)SLAM(landmark based SLAM)
目前國內的大部分雷達廠商都還不具備量產資格,即使從2018年開始研發4D成像雷達,如今(2023年)5年的時間過去了,也只有幾家企業官宣量產上車。
國外雷達企業如大陸、博世、安波福、海拉、奧托立夫等玩法諸多,有多芯片級聯方案、有特殊的天線結構、布陣形式等。METAWAVE的核心技術是利用超材料構建波束掃描收發陣列,采用基于Pencil Beam的窄波束掃描整個FoV,并在算法層面引入AI Engine,實現了一款高分辨智能雷達。另外,Cognitive、Arbe、Oculii、Uhnder、Vayyar、Lunewave、Echodyne、瑞薩等公司都在相繼研發4D成像雷達。
4、4D成像雷達實現方案
總的來說,目前主要有以下四種方案,未來可能還會出現新的方案。
(1)軟件虛擬孔徑雷達方案
本方案強調“軟件定義的雷達”,主要廠家有傲酷(Oculii)、Mobileye、Zadar等。軟件虛擬孔徑雷達(VAR),其核心在于通過軟件模擬,增大毫米波雷達的孔徑以提升角分辨率。角分辨率即為雷達的指向精度。比如雷達指向精度0.01rad(換算成角度就是0.6°),則自動駕駛車輛可以在100米的距離獲得1米的分辨率。在雷達中,角分辨率的高低與波長與孔徑大小有關(3dB波束寬度或半功率波束寬度),即波長越長,角分辨率越低,孔徑越大,分辨率越高。
傳統毫米波雷達大多為24GHz,波長較長且孔徑小,其特性注定角度分辨率低。倘若擴展天線的尺寸或者增加天線的數量,可以提高雷達性能,但也會顯著增加成本、尺寸和功耗。而
4D成像雷達可通過虛擬孔徑成像軟件算法和天線設計模擬數倍、甚至數十倍天線以提升角分辨率。4D成像雷達公司傲酷(美國)推出的商用4D成像雷達EAGLE,其搭載虛擬孔徑成像軟件可動態發送相位調制的自適應波形。該波形可跟隨環境實時變化,并隨時間編碼數據,從而可雷達硬件的角分辨率最高提升達100倍。最終實現水平120°和縱向30°的寬視場中提供0.5°水平x1°縱向的角分辨率。傲酷的點云數量看似很多,但其犧牲了置信度換取更高的分辨率,實則點云的質量并不高,且國內反響并不明顯。
(2)專用成像雷達芯片方案
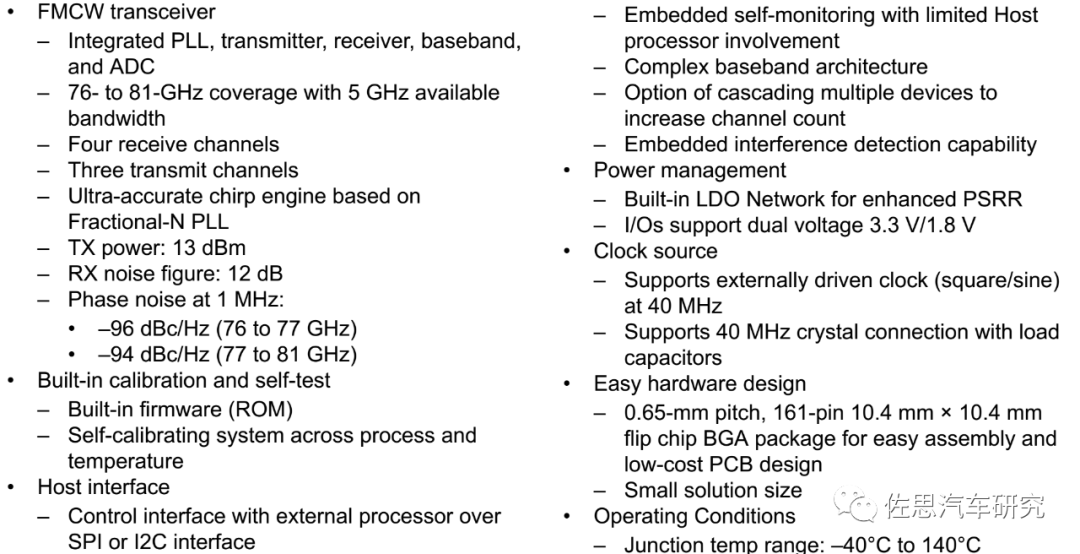
本方案主要是如Arbe、Vayyar等。成像雷達芯片是整個系統的核心,包括多種功能電路,如低噪聲放大器(LNA)、功率放大器(PA)、混頻器、壓控振蕩器(VCO)、鎖相環頻率綜合器(PLL)、本振鏈路(LO)、移相器(Phase shifter)、倍頻器(Frequency multiplier)、分頻器(Divider)、可編程增益放大器(PGA)、濾波器(Filter)、甚至收發天線等,需要具備射頻損耗小、噪聲低、頻帶寬、動態范圍大、輸出功率大、功率附加效率高、抗電磁輻射能力強、收發隔離度高等特點。
目前量產的76GHz~81GHz毫米波雷達芯片技術大都采用SiGe制程,接收通道、發射通道和本振(LO)通道分開實現。目前正在向成本更低、集成度更高的硅基CMOS技術演進,從65nm、40nm逐步向28nm、16nm工藝演進,同時集成度進一步提高,實現射頻前端、ADC、MCU和存儲器單片全集成,達到成本低、封裝小、重量輕、功耗低的設計要求。
毫米波雷達根據點云密度由低至高可分為24GHz、77GHz、79GHz三種,以前24GHz為市場主流,目前77GHz及79GHz初入量產階段,逐漸替代24GHz。點云密度低意味著自動駕駛車輛在行駛中無法對周圍行人、車輛、樁桶點云成像,使得僅搭載毫米波雷達的車輛無法在復雜路段行駛。而目前4D成像雷達普遍為77GHz及以上頻段,車輛可在行駛中達到類似激光點云的成像方式。
但存在問題是,Arbe的超高通道方案目前行業整體反饋并不好,Vayyar則被TI拆解后發現造假。
(3)多芯片級聯方案
本方案主要目的是以增加天線數量,提高角度分辨率,比如大陸、博世、采埃孚(ZF)、森思泰克、楚航科技、行易道等一眾公司。
毫米波雷達天線的主流方案是微帶陣列,利用較小的高頻印刷電路板(PCB)空間產生足夠的天線輻射強度,并實現與芯片的互連。基于多芯片級聯的79GHz MIMO毫米波成像雷達是未來產業化方向,采用多芯片級聯和微型化PCB板載天線陣列,加上雷達信號處理,可以實現面向高精度多維成像的79GHz MIMO虛擬陣列雷達,將識別精度進一步提升到微米級別,支持距離、速度、角度、高度測量和多視角可調多工作模式,實現全天候下的多維毫米波成像。
芯片級聯可分為雙級聯、四級聯、六級聯和八級聯4種方式,通過3發4收的芯片聯為一體組成6發8收、12發16收、18發24收、24發32收芯片。然而,此種傳統提高角分辨率的方式,只是簡單堆砌更多芯片、更多天線。例如提高角分辨率到1度角,必須通過多個芯片級聯、增加天線孔徑,但缺點是雷達硬件受成本、尺寸、功耗的限制較大,部分四級聯成像雷達功耗都達到25W。
(4)超材料方案
采用超材料研發新型雷達架構,代表廠家有Metawave等。通過在超材料表面上嵌入顯微結構,該結構可結合電磁波傳播技術,以此創建出比傳統電路要小很多的電路。此類技術為代表的公司是Metawave,其SPEKTRA雷達通過模擬波束并不斷轉向波束,可對350米以上的車輛和200米以上的行人進行檢測和分類。
Metawave采用的方法是把電磁波束緊緊地聚攏起來,讓其能量集中在一處,要實現這樣的效果,在數字空間(Digital Space)是辦不到的,只有在模擬空間(AnalogSpace)里才能做到。實際上,WARLORD可以說是一款模擬波束雷達產品(Analog Beam Forming Radar)。WARLORD的技術特性如下所示:
(1)Metawave采用的是單天線,而非天線陣列,同時接收也是單線的。這種天線由復合超材料結構而成,每一個超材料單元(Unit Cell)都有活躍組件能夠參與波束成形,還能調整波束角度,這相較于如今大部分雷達用的多天線結構有很大的優勢。
(2)Metawave采用了英飛凌、NXP和TI等Tier2的芯片將天線和芯片組進行了整合。
(3)采用優越的微控制技術,比如要控制天線探測前方的物體,追蹤其距離、角度、速度以及運動的方式,同時還要判斷這些物體的類別,最后還要把這些經過處理的信息傳送給(自動駕駛汽車)的傳感器融合單元。
5、4D成像雷達算法
雷達算法分為信號處理和數據處理兩個部分,信號處理偏底層,是雷達算法的關鍵基礎技術,雷達信號處理(Radar Signal Processing,RSP),主要要包含如下幾個方面:
(1)陣列天線設計
陣列天線布局設計與優化,涉及到均勻線陣(ULA)、非均勻線陣(NLA)、最小冗余陣(MRA)、嵌套陣(NA)、互質陣(CPA),4D成像雷達的方位角分辨率和俯仰角度分辨率需要達到1°以內。
通常布陣后續的MIMO信號處理和超分辨DOA估計是聯合在一起的,需要系統考慮。
(2)MIMO信號處理
MIMO信號處理主要是通道分離,主要涉及到波形設計技術,如TDMA、BPMA、DDMA、CDMA、TDMA+DDMA-MIMO等波形,另外還有采用PMCW波形。
(3) 目標檢測與參數估計
雷達鏈路預算、CFAR、測距、測速、測角,比如FFT+插值細化。
(4) 超分辨DOA估計
FFT、DBF、Capon等算法分辨率不夠,無法提供角度高分辨,因此需要采用超分辨算法,比如ROMP、IAA、DML、CS、神經網絡DOA估計等。DOA算法大概有20多種,傳統的毫米波雷達采用的算法還是ULA+FFT,但對于4D成像雷達還不夠,一般為了滿足實時性要求,在工程上大多數方案喜歡ULA(稀疏陣)+FFT粗搜+超分辨細搜方案。
(5)通道校準(Calibration)
天線通道校準是必須的,校準方面如通道幅相誤差、頻率誤差、陣列互耦誤差、陣元位置誤差、方向圖一致性誤差、有限采樣誤差(Finite Samping Error)、安裝誤差(Mount Error)等。
(6)點云聚類算法
聚類算法并不是必須的,有時候無須聚類也行。常用的聚類算法是DBSCAN,但對于實際場景中如何區分汽車和汽車旁邊的行人,并不會引起同簇分裂和異簇合并,卻沒有那么簡單。一些新的聚類算法被提出用于提高算法執行效率或者改善聚類效果,比如多幀聯合聚類(ICP)、分階段二次聚類,或者基于Kd-tree的加速聚類算法。
(7)目標跟蹤算法
目標跟蹤算法主要涉及航跡起始、跟蹤濾波和數據關聯三大核心技術。航跡起始有邏輯法(滑窗法)、直觀法、Hough變換法。跟蹤濾波采用卡爾曼濾波,卡爾曼濾波有很多種,如KF、EKF、UKF、CKF。關聯算法有單目標采用NN、PDA,多目標采用JPDA、匈牙利匹配。
(8)目標分類與識別算法
目標識別技術可以對被檢測物體進行區分和分類,識別完成之后,就有可以針對特定類型的目標優化信號處理算法,例如,針對客車和行人可以采用不同的跟蹤和濾波算法,這樣可以提高雷達的檢測效果,這種就有點類似于自適應動態調整。
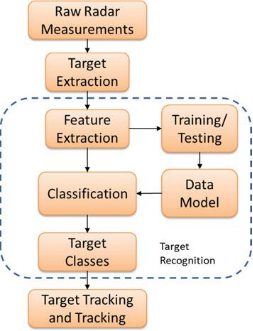
常見的機器學習算法有KNN、SVM、隨機森林、決策樹等等。
(9)多傳感器融合
雷雷融合、雷視融合等。
(10)可行駛區域檢測
可行駛區域檢測可以幫助自動駕駛汽車規劃行駛路線。
上述技術的具體實現方法,本文不做詳細論文,留待后續的文章中詳細解析。
6、4D成像雷達效果展示
(1)ARS548
點云數量并不多,但質量是真的高。
(2)Arbe

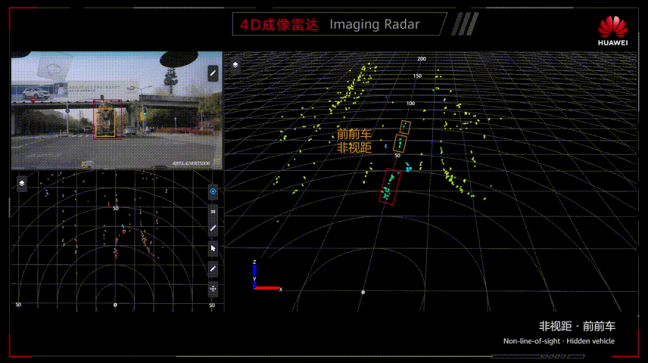
(3)華為
(4)特斯拉
(5)傲酷
從本文開始,博主將做一個4D成像雷達專欄,主要分析當下的4D成像雷達前沿技術和工程應用技術,幫助讀者認識4D成像雷達。當然,其他種類的雷達也可以借鑒4D成像雷達技術,因為大多數內容是相通的。所有文章的Word版會陸續放在了年度會員文章庫中,會員可直接下載閱讀。
【本期結束】
| 序號 | 類別 | 內容 | 文件路徑 |
|---|---|---|---|
| 1 | 雷達文章 | 本文內容Wrod版 | 根目錄雷達文章庫 |
【點擊以下鏈接可直達各個業務模塊】
| 加入年度會員(專屬VIP群) | |
|
雷達項目交流與合作 |
|
本文是空閑時個人的心得體會,僅供參考。目前我還有很多內容需要學習,如果還有沒有說到或者不全面的地方,還請指正,感謝大家。喜歡本文,可以轉發朋友圈。歡迎關注備用號【跳頻連續波】。
審核編輯黃宇
-
成像
+關注
關注
2文章
243瀏覽量
30516 -
雷達
+關注
關注
50文章
2963瀏覽量
117837 -
4D
+關注
關注
0文章
62瀏覽量
11622
發布評論請先 登錄
相關推薦
擁抱自動駕駛,4D成像毫米波雷達已悄然崛起!
剖析如何做好一款4D高分辨毫米波雷達

什么是4D毫米波雷達?
4D毫米波雷達加速了4D成像系統的可能性
4D毫米波雷達發展到哪一步了?國內18家供應商技術盤點
4D毫米波雷達市場技術盤點
經緯恒潤新產品系列 | 4D成像毫米波雷達

對比ZF和特斯拉的4D毫米波雷達設計,國產4D毫米波雷達迅速崛起

經緯恒潤4D成像毫米波雷達亮相 CES 2024





 工商網監
工商網監
評論