 FANUC機器人建立part carrier和跟蹤參數的方法
FANUC機器人建立part carrier和跟蹤參數的方法
FANUC機器人建立part carrier和跟蹤參數的方法
1) 打開 Cell Browser
2) 點擊 Fixtures
3) 右鍵點擊 Generic Simple Conveyor
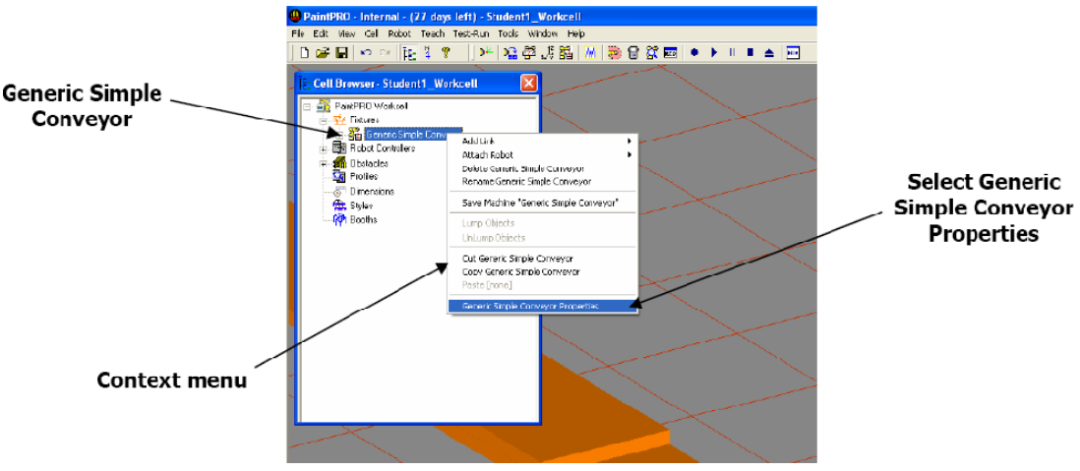
4) 選擇 Generic Simple Conveyor Properties
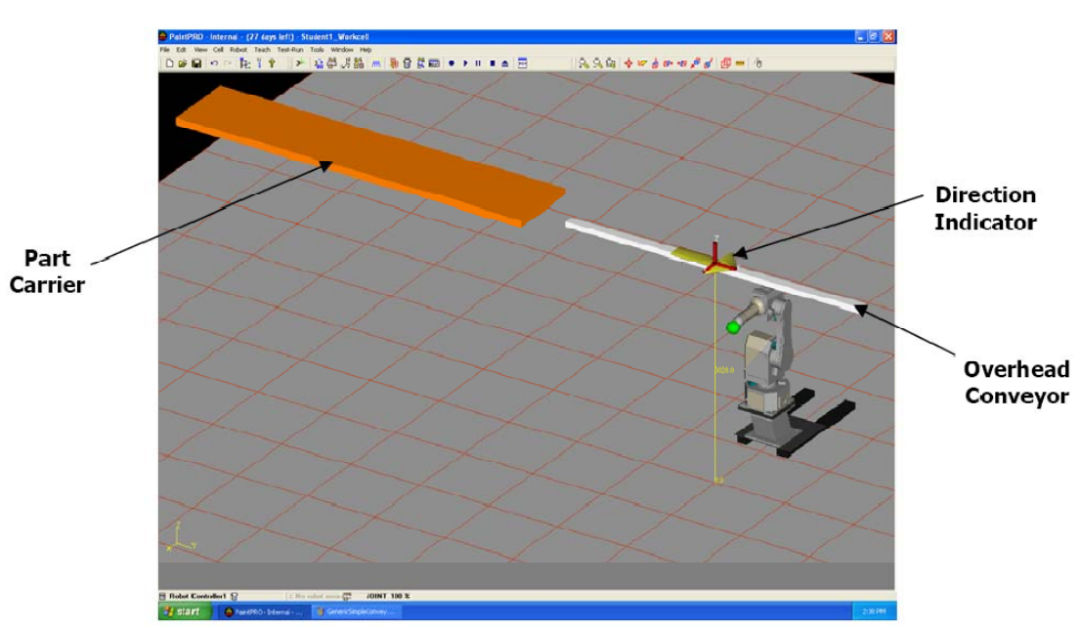
5) 將名字改為 Overhead Conveyor
6) 將 Overhead Conveyor X 方向的 Size 改為 127mm
7) 將 Overhead Conveyor Y 方向的 Size 改為 4267mm
8) 將 Overhead Conveyor Z 方向的 Size 改為 76mm
9) 將 Overhead Conveyor Z 方向的 Location 改為 3028mm
10) 點擊 OK 關閉對話框
11) 雙擊 Part Carrier
12) 點擊 Link CAD 欄
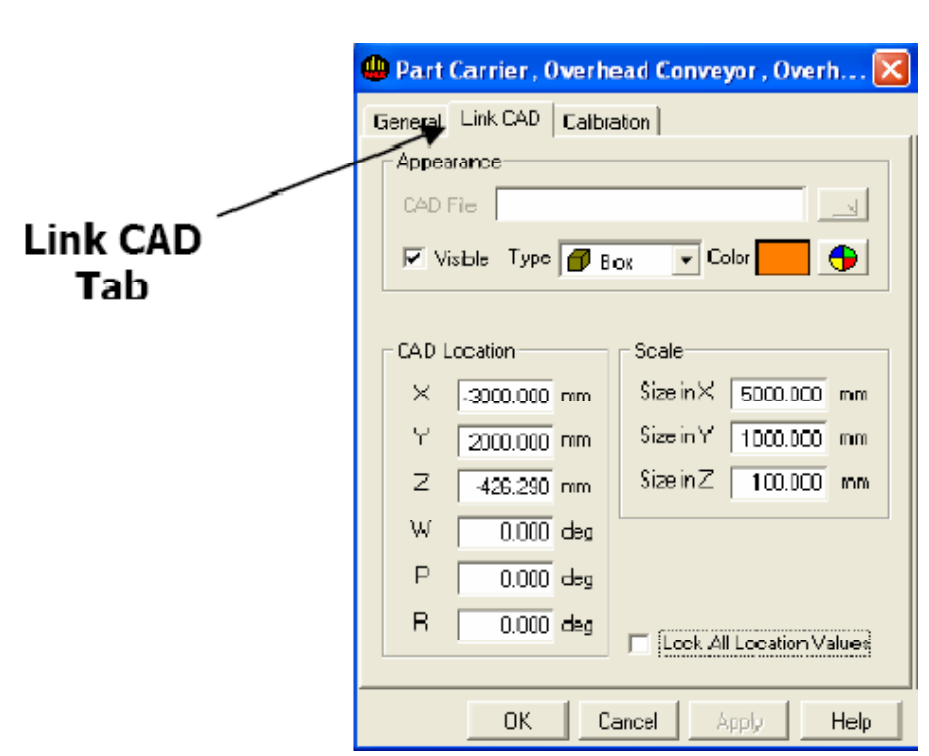
13) 將 X 方向的 Size 改為 40mm
14) 將 Y 方向的 Size 改為 40mm
15) 將 Z 方向的 Size 改為 1066.8mm
16) 在 CAD Location 部分,將 X 方向的值改為 1960
17) 在 CAD Location 部分,將 Z 方向的值改為‐603.871
18) 點擊 OK 關閉對話框。
19) 在 Cell Browser 上右鍵點擊 Part Carrier
20) 選擇 Add Link—Box
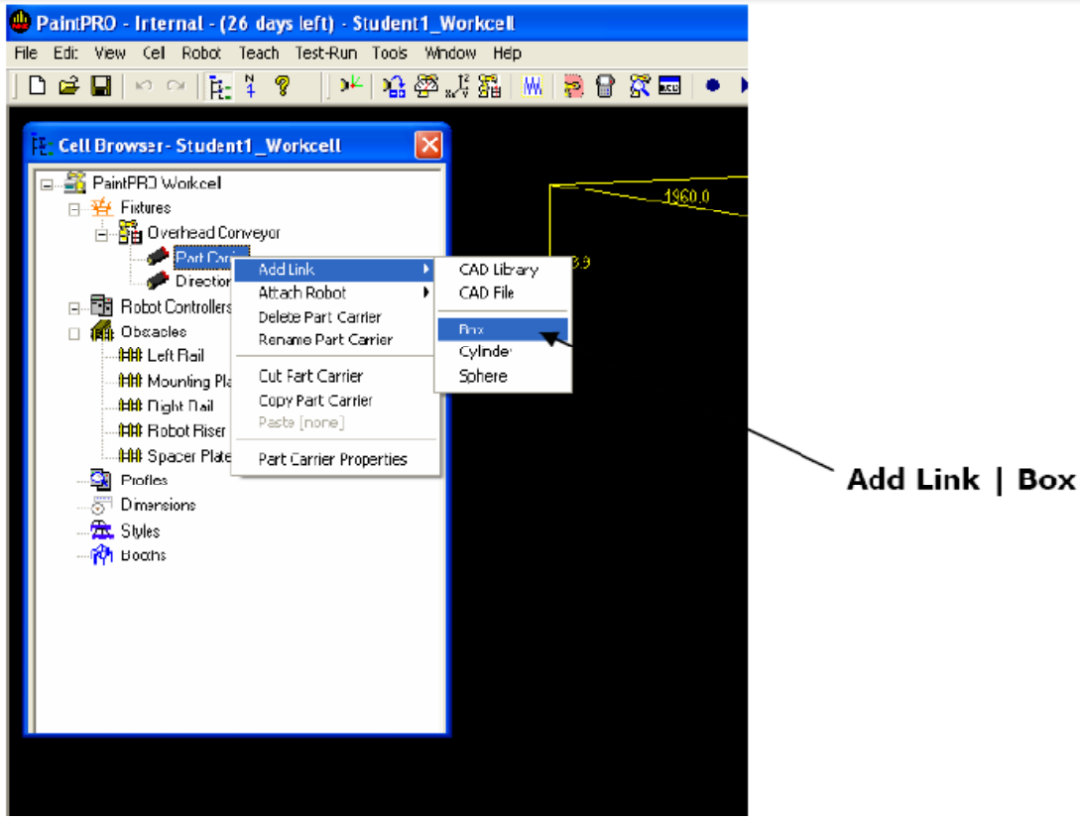
21) 在出現的對話框中將名字改為 Part Carrier Extension 1
22) 點擊 Link CAD 欄,
23) 將 Scale 部分的 X 方向數值改為 40mm
24) 將 Scale 部分的 Y 方向數值改為 40mm
25) 將 Scale 部分的 Z 方向數值改為 295mm
26) 將 CAD Location 部分的 Y 方向數值改為 5.6mm
27) 將 CAD Location 部分的 Z 方向數值改為‐1053mm
28) 將 CAD Location 部分的 W 方向數值改為‐45degrees
29) 點擊 OK 關閉
30) 在 cell browser 中,右鍵點擊 Part Carrier Extension 1
31) 選擇 Add Link—Box
32) 將新出現的 BOX 名字改為 Part Carrier Extension 2
33) 點擊 Part Carrier Extension 2 的 Link CAD 欄
34) 將 Scale 部分的 X 值改為 120mm
35) 將 Scale 部分的 Y 值改為 76.2mm
36) 將 Scale 部分的 Z 值改為 1066.8mm
37) 將 CAD Location 部分的 Y 值改為‐3mm
38) 將 CAD Location 部分的 Z 值改為‐274mm
39) 將 CAD Location 部分的 W 值改為 45degree
40) 點擊 OK 關閉對話框。
41) 雙擊 Direction Indicator
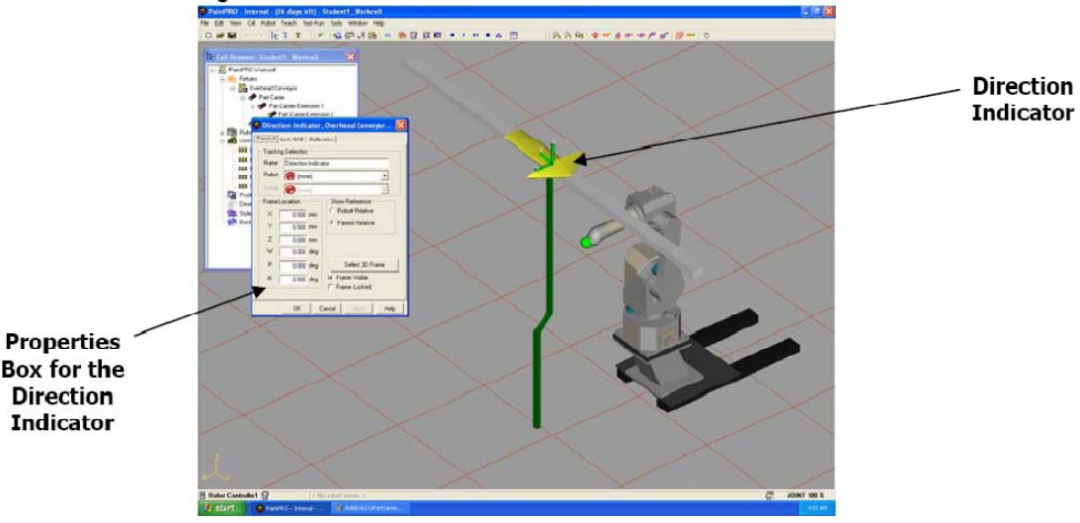
42) 在出現的對話框中,根據你自己的需要改變參數:Scale,location 等。
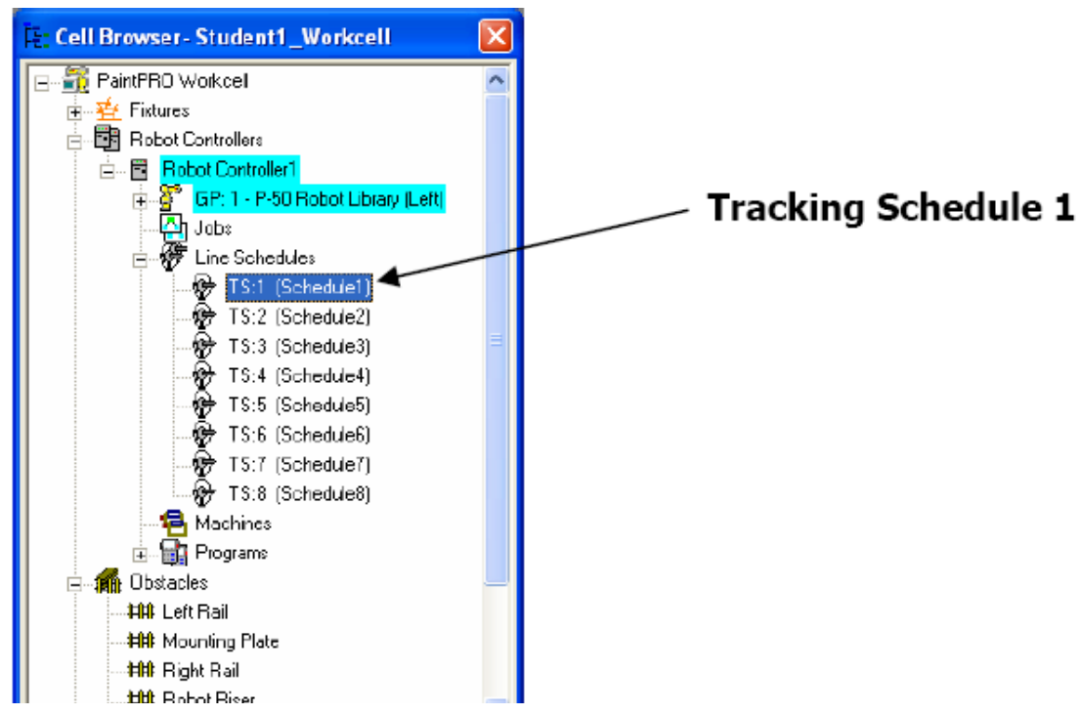
43) 打開 cell browser
44) 雙擊

,打開屬性界面。
45) 在 General 欄上的 Tracking 部分把數值改為 900mm。

46) 點擊 Boundaries 欄
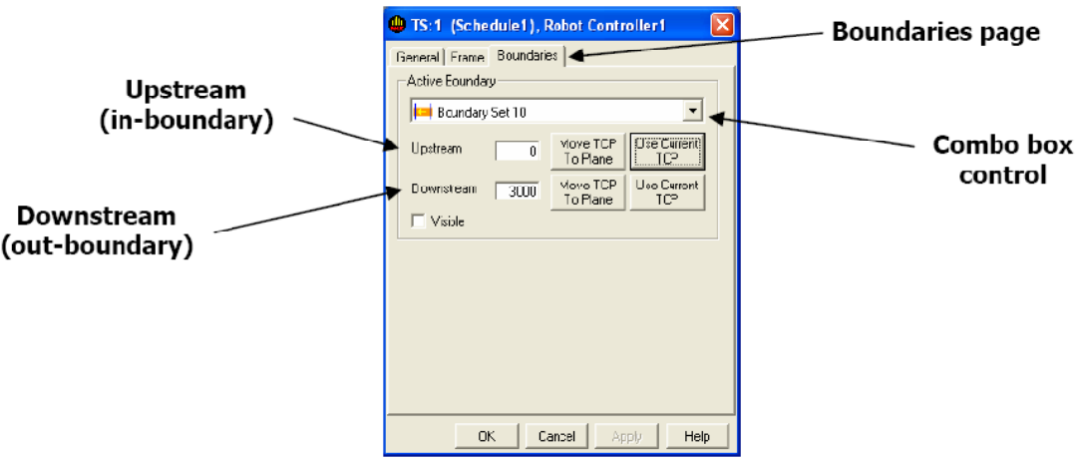
47) 將 Boundary Set 10 的 Upstream 數值改為‐1100mm。
48) 將 Boundary Set 10 的 Downstream 數值改為 1100mm。
49) 點擊下拉菜單,將 Boundary Set 9 的數值設置。
50) 設置其他的 Boundary Set 的數值。
51) 點擊 OK,關閉對話框。
趕緊轉發收藏吧!
-
機器人
+關注
關注
211文章
28620瀏覽量
207929
原文標題:FANUC機器人如何建立 part carrier和跟蹤參數?
文章出處:【微信號:robotqy,微信公眾號:機械自動化前沿】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【mBot申請】基于Nao機器人的視覺跟蹤處理
博智慧達激光焊縫跟蹤器成功與金紅鷹機器人完成通訊
焊縫跟蹤:自動化機器人實時焊縫跟蹤尋位
焊縫跟蹤:機器人焊縫跟蹤系統的優勢分析
拳頭機器人視覺線跟蹤系統介紹
FANUC 工業機器人編程與聯網相關資料推薦
差速移動機器人軌跡跟蹤控制方法
淺談差速機器人的純軌跡跟蹤仿真
基于Matlab和VR技術的移動機器人建模及仿真
FANUC機器人宏程序自動運行的方法及啟動宏程序的步驟教程

如何更換FANUC機器人本體電纜







 工商網監
工商網監
評論