 如何更換FANUC機器人本體電纜
如何更換FANUC機器人本體電纜
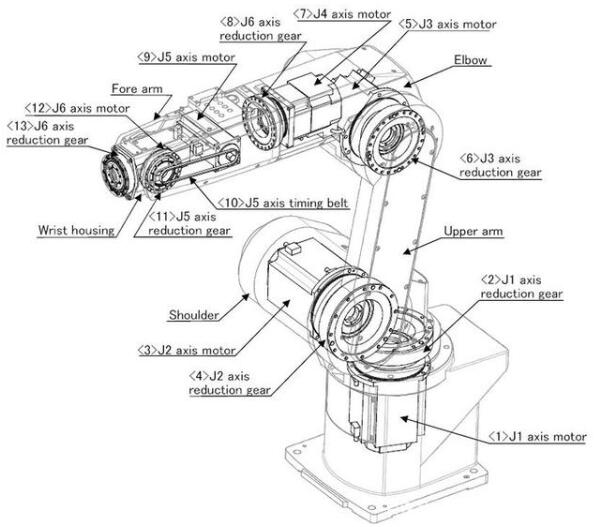
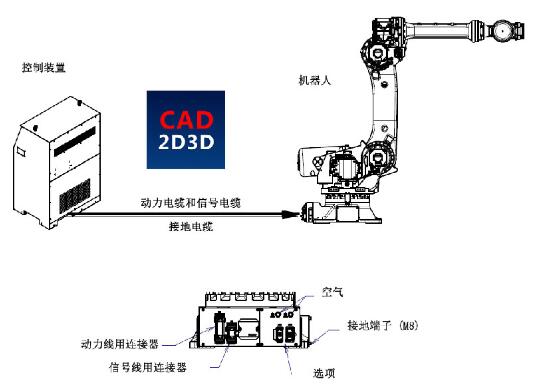
本文以FANUC機器人R-2000i系列為例。對R-2000i機器人進行更換本體電纜操作,該型號的本體電纜分為動力電纜和編碼器電纜,更換的方法類似。
使用工具清單:
內六角扳手一套、斜口鉗、十字螺絲刀,一字螺絲刀、魚嘴鉗、退針器、尼龍扎帶若干。
作業中安全用品一覽:
安全帽、安全掛鎖、手套、安全鞋
拆卸步驟 :
1.將機器人置于所有軸0度的位置(特殊情況也可以置于其他姿態),做好MC備份和鏡像備份,然后斷開控制柜的電源
2.從機器人底座的配線板拆除控制柜側的電纜

3.將配線板拆出

4.將本體電纜與外罩分離

5.將電池盒接線端子拆除

6.將J1底座的內部接地端子拆除

7.將本體電纜插頭完全分離

8.拆除J1-J2軸編碼器插頭蓋板,然后各軸拆除編碼器插頭。(拔除編碼器插頭會導致零位,在更換電機,編碼器,減速機,電纜以外的情況下,請勿拆除編碼器插頭)

9.拆除電纜各軸的動力接頭

10.拆除電纜各軸的剎車接頭

11.拆除J2軸基座上的蓋板

12.拆除J1軸上側夾緊電纜的蓋板

13.拆除J1軸基座內的板,拆除固定電纜夾的螺栓

14.將本體哈丁頭從J1底座管部拉出

15.拆除J2軸側板的固定螺栓

16.拆除J2軸機械臂的蓋板

17.拆除電纜的夾緊蓋板

18.拆除電纜的防護布

19.拆除J3軸外殼的正面配線板

20.拆除J3軸外殼的左側蓋板1

21.拆除拆除J3軸外殼的左側蓋板2

22.拆除J3軸外殼右側走線板

23.將J3-J6軸電纜穿過鑄孔,并將其拉到正面側來

然后切斷束緊著計劃更換電纜的尼龍扎帶,從而拆除電纜。
24.將電纜用尼龍扎帶束緊后,用螺栓將電纜固定在J2軸機臂上。

25.將蓋板安裝到J2機臂上。

26.新電纜在需要固定并扎緊的部位有黃色膠帶標記,按照標記固定并束緊扎帶,如果綁的過后或者過前會導致之后的走線不順暢。

27.用扎帶將電纜束緊,將J1軸的上側蓋板固定在J2軸基座上。

28.安裝好側邊的蓋板。

29.將電纜穿過平衡缸下側,注意電纜的修整,避免電纜與平衡缸相互干涉。

30.將電纜從J1軸管孔穿過。

31.將其拉到J1軸基座后側,在線夾處用尼龍扎帶將電纜固定好。

32.如果是更換本體編碼器電纜,需要用退針器將30,37號針腳的短接插頭(超程信號)退出,裝到新的電纜當中。

33.將哈丁頭固定在配線板上,將地線接好,電池盒電纜接好(注意正負極,不要裝反)。

34.將J3-J6軸電機插頭從J3軸外殼側穿過其中的鑄孔。

35.將J3-J6軸電纜固定在安裝板。

36.將J3軸外殼的各個蓋板安裝好。

37.將各軸的電機編碼器,剎車,動力接頭連接好。安裝好J1-J2軸的編碼器保護板。

38.檢查各個蓋板螺栓是否齊全,擰緊。

最后接通電源,重新校準機器人零位,檢查機器人狀態是否正常。
-
機器人
+關注
關注
211文章
28501瀏覽量
207484 -
電纜
+關注
關注
18文章
2730瀏覽量
54884
原文標題:一步步教你如何更換FANUC機器人本體電纜
文章出處:【微信號:GKB1508,微信公眾號:工控幫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【Tisan物聯網申請】WiFi 機器人
ABB機器人維修保養指南
安川機器人維修保養的相關調試方法介紹
工業機器人應用編程考核設備分享
機器人系統與控制需求簡介
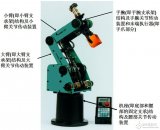
機器人本體基本結構特點及材料
面向工業領域機器人的伺服電纜要怎么選型

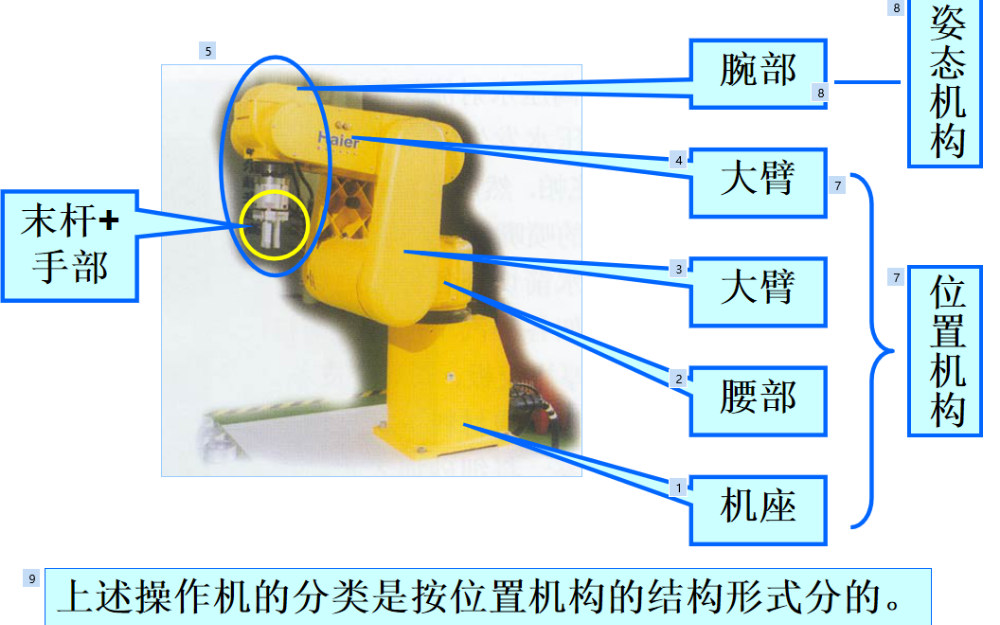
解析機器人本體組成的5部分
機器人本體是指什么_機器人本體主要包括哪幾部分
機器人本體與控制柜連接線_機器人本體的結構形式
工業機器人安裝調試的13個步驟






 工商網監
工商網監
評論