 相機自動抓拍器的制作
相機自動抓拍器的制作
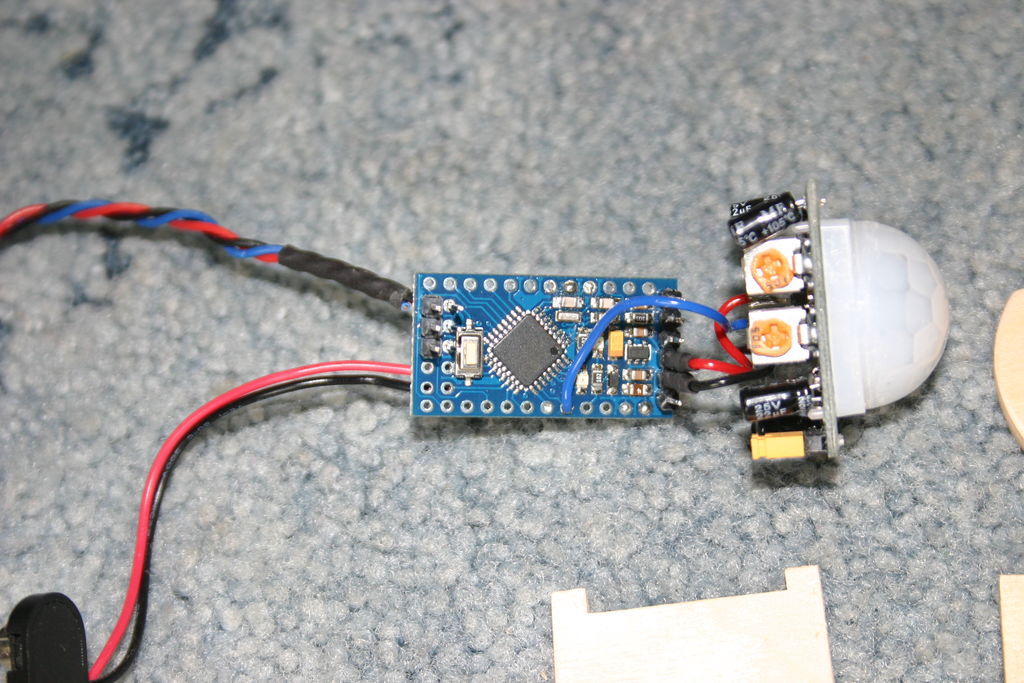
第1步:第一版和所需部件。
所以第一個版本(它與最終版本相同,但保存方式不同)在長線上有PIR探測器,這使得它可以放置在鳥桌的屋頂下,紅外發射器也在長線并朝向相機指向手柄前部的傳感器。我在測試時發現距離不是那么大,我猜你可以用電阻器值來獲得更好的距離,但我最多只能安裝一米。
現在這個第一個系統確實運行得很好,但它需要大量的食物放在桌子上,這反過來吸引了大量的椋鳥。現在不要誤解我們的錯誤Starlings是好鳥,但不是那么有趣,并且使用鳥桌導致了數百張照片。所以我決定嘗試不同的方法。
第2步:第二版(新房)

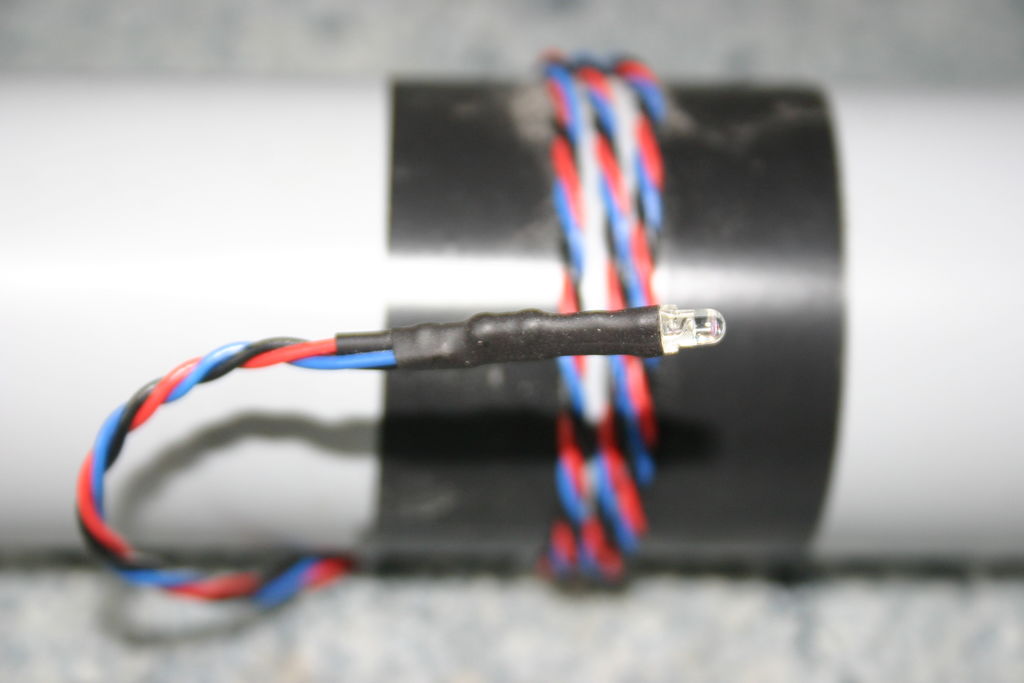
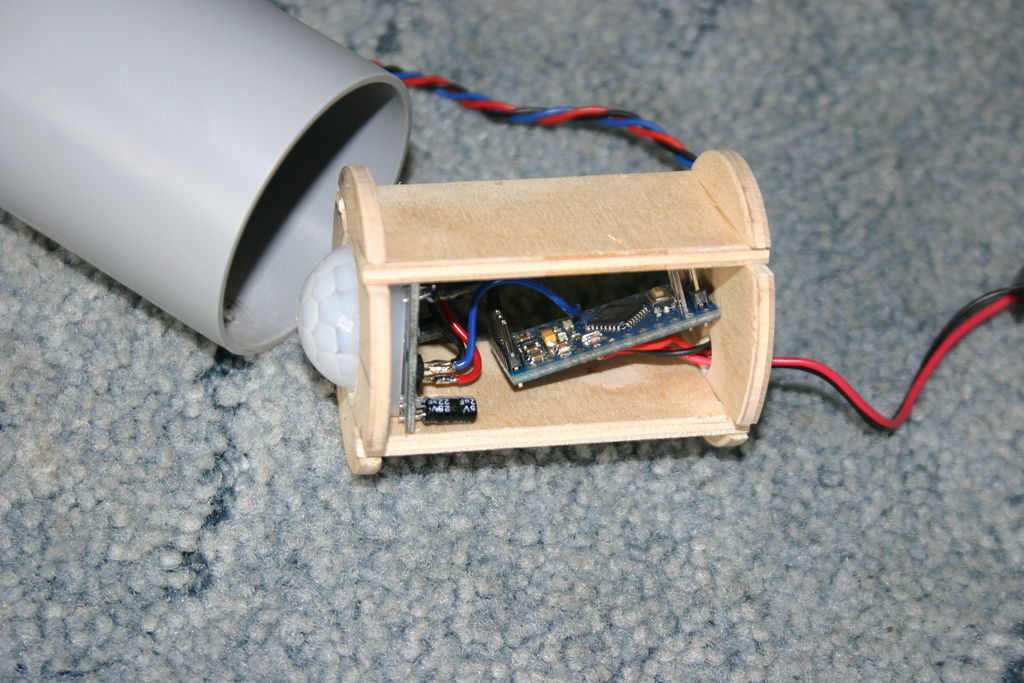
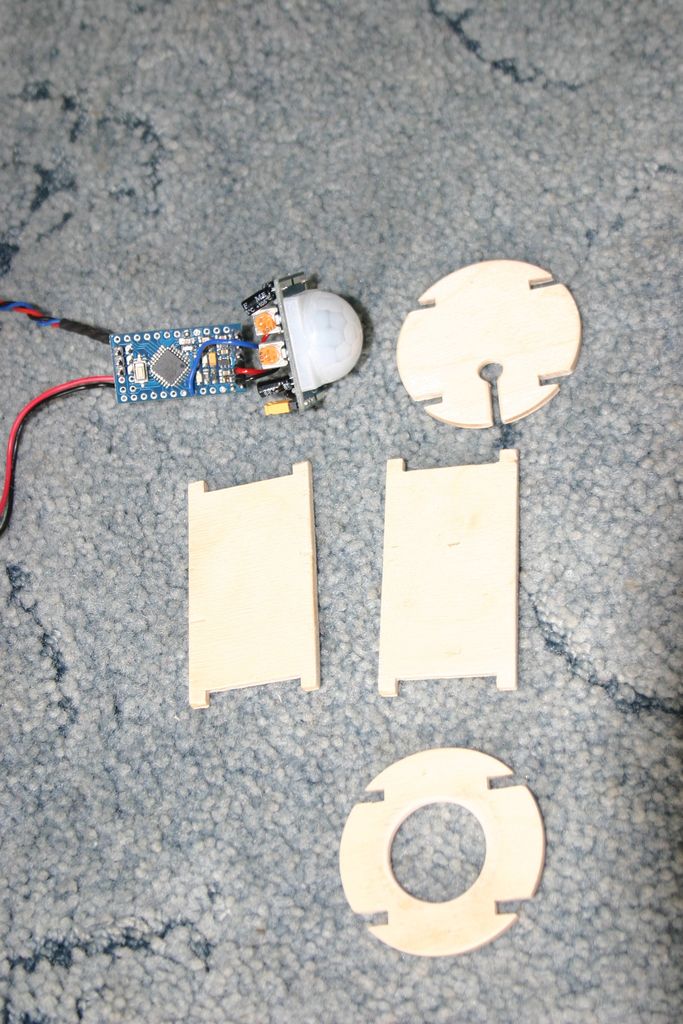


因此在第一次嘗試后我決定使用PIR傳感器應指向與相機相同的方向。因此,我組裝了一個小支架并將該裝置放置在一個小孔管(用于棚屋的排水管)中,這樣做的另一個好處是可以將該裝置向下推到管子上,以提供更小的傳感器窗口。我嘗試了這個,似乎工作得很好。然后我找到了一個合適的坐騎,并將相機安裝在三腳架旁邊。
這個版本是否正常工作????
是和不,最輕微的動作(風)或照明(太陽/云)的差異會導致相機拍照。所以說它很敏感是輕描淡寫!我有數百張照片,很快就把相機電池拿出來了!
那么下一步是什么?
第3步:對系統的改進! (藝術許可證)


所以第一件事就是做的是停止喂食器移動。這很簡單,在其中一張圖片中,我將送料器系在另一個送料器上,您可以選擇將木制定位銷擰入底部。所以這兩種方法都運作良好。并且還將進料器放置在其他任何物體都不會移動的區域,這意味著墻壁。 (不是最好的照片,但接下來我們會對它進行排序!)
拍出漂亮的照片并將其打印到畫布上以提供漂亮(不動)的背景。
至于云/太陽問題,我在陰涼處設置了喂食器!令人驚訝的工作!但是你需要使用ISO設置或曝光設置來照亮照片。
步驟4:設置相機。
這些新的(現代的) )相機是如此聰明,有時候做一些不同的事情可能是一個挑戰,在我的情況下,我必須在我的CANON 700(反叛)上做以下事情
確保你有一個充滿電的電池。
關閉省電功能,使相機永不關機。
“上交”LCD顯示屏以延長電池壽命。
將相機設置為聚焦在進紙器上,如果需要,甚至可以關閉自動對焦。
關閉三腳架上不需要的IS(圖像穩定器)并浪費電池。
將相機設置為在IR上觸發。
設置為光圈模式并檢查圖像時間/曝光調整ISO以使速度快于約1/60。
檢查它不會下雨....
第5步:Arduino草圖
我不能因為佳能IR已經被這個家伙攻擊了整個節目...
Canon IR Hacked
Arduino程序使用音調功能基本上驅動紅外LED在設定頻率下設定的時間。我已添加循環以檢查PIR是否已給出輸出。我使用了一個模擬引腳,因為PIR的輸出僅為3伏,而arduino沒有采用邏輯變化。
int IRLed = 2;
int PIR = A3;
int PIRValue = 0;
void setup()
{
pinMode(led,OUTPUT);
pinMode(IRLed,OUTPUT);
pinMode(PIR,INPUT);
}
void takePicture()
{
unsigned long startTime = micros();
音(2,32700);
while((unsigned long)(micros() - startTime)<472){}//等到完成
noTone(2);
while((unsigned long)(micros() - startTime)<7802){}//等到完成
tone(2,32700);
while((unsigned long)(micros() - startTime)<8274){}//等到完成
noTone(2);
}
void loop()
{
if(PIRValue >> 500)
delay(2000);
{
takePicture();
}
延遲(3000);
}
-
相機
+關注
關注
4文章
1365瀏覽量
53809 -
PIR傳感器
+關注
關注
3文章
57瀏覽量
9729
發布評論請先 登錄
相關推薦
焊接熔池監控相機如何助力自動化生產
氛圍感抓拍神器,OPPO發布年度影像旗艦Find X8系列


YXC差分可編程振蕩器,頻點200mhz,封裝5032,LVDS輸出,應用于工業相機
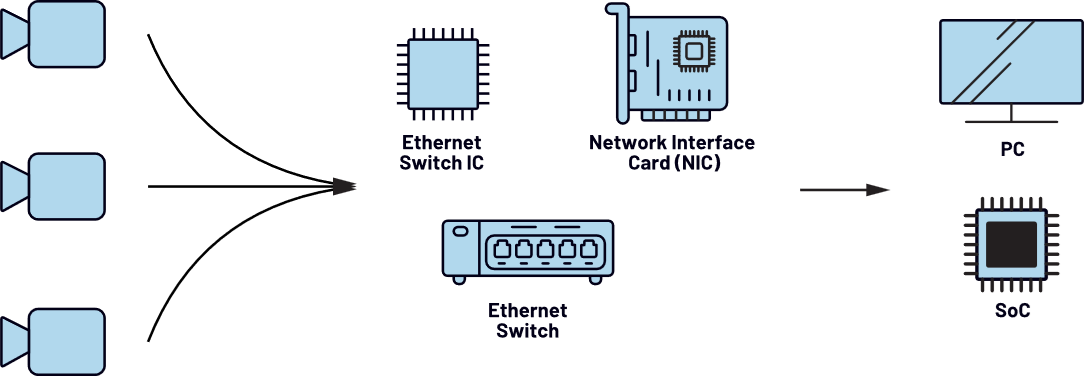
友思特應用 多接口的智駕無憂:GigE相機在自動駕駛數據采集系統的穩定應用
熔池監控相機的原理是什么
工業相機用圖像處理板 camera link接口是最優選

康謀技術 |深入探討:自動駕駛中的相機標定技術

面陣相機的工作原理 線陣相機和面陣相機的區別在哪
如何用Arduino制作一個簡易自動喂魚器
面陣相機和線陣相機的區別





 工商網監
工商網監
評論