完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > 攝像頭
攝像頭(CAMERA或WEBCAM)又稱為電腦相機(jī)、電腦眼、電子眼等,是一種視頻輸入設(shè)備,被廣泛的運(yùn)用于視頻會(huì)議,遠(yuǎn)程醫(yī)療及實(shí)時(shí)監(jiān)控等方面。
文章:4373個(gè) 瀏覽:96076次 帖子:904個(gè)
STM32單片機(jī)上RGB數(shù)據(jù)轉(zhuǎn)為JPEG格式辦法
在STM32單片機(jī)上調(diào)用OV系列攝像頭讀取實(shí)時(shí)視頻,然后對(duì)數(shù)據(jù)進(jìn)行分析,分析之后再通過WIFI或者4G網(wǎng)絡(luò)傳輸給服務(wù)器保存和顯示。因?yàn)樘幚頂?shù)據(jù)時(shí),采用的...
PremierFarnell 和 e絡(luò)盟全球技術(shù)營銷部門總監(jiān) Cliff Ortmeyer表示:“設(shè)計(jì)工程師時(shí)常需要在設(shè)計(jì)中融入最新技術(shù),而從頭實(shí)施這些...
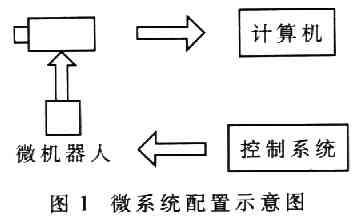
基于增量K均值分段HMM的識(shí)別算法在微機(jī)器人控制系統(tǒng)中的應(yīng)用
據(jù)統(tǒng)計(jì),人類日常生活中的溝通大約有75%左右是通過語言來完成的。語言作為人類特有的功能,不但是相互傳遞信息的主要手段,也是人們最理想的人機(jī)交互方式之一。...
2018-12-07 標(biāo)簽:控制系統(tǒng)機(jī)器人攝像頭 4019 0
近年來,汽車ADAS高級(jí)駕駛輔助系統(tǒng)裝車率正在快速增長(zhǎng)。縱覽各大廠商,這些技術(shù)基本上集中在L2-L3級(jí)自動(dòng)駕駛,而為了實(shí)現(xiàn)這些功能,單車感知系統(tǒng)中,攝像...
使用OVM6946和OV426設(shè)計(jì)內(nèi)窺鏡吧!
這四個(gè)型號(hào)區(qū)別不大,主要是尺寸,不帶M的直接一個(gè)CMOS,但是這樣的尺寸對(duì)鏡頭要求極高,那么帶M的就是自帶了鏡頭。另外46和48的CMOS價(jià)格差一半,然...

據(jù)麥姆斯咨詢介紹,自動(dòng)駕駛汽車(AV)技術(shù)及其發(fā)展路線圖上還有很多問題有待解決。其中,三個(gè)懸而未決的大問題正在突顯。
2019-01-02 標(biāo)簽:攝像頭雷達(dá)自動(dòng)駕駛 4004 0
用于無人機(jī)的英特爾Aero計(jì)算板和視覺配件套件簡(jiǎn)介
英特爾?Aero計(jì)算板和視覺配件套件是即用型無人機(jī)(UAV)開發(fā)平臺(tái)的一部分
可以實(shí)現(xiàn)的效果就是打開攝像頭掃描一張二維碼圖片然后顯示二維碼里面的內(nèi)容,看個(gè)視頻一睹為快吧(界面待優(yōu)化):
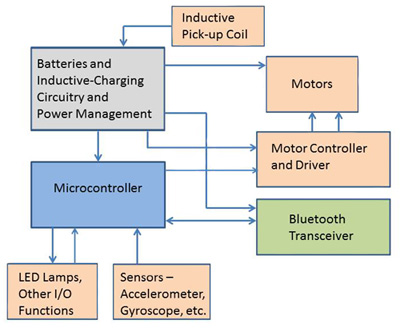
利用無線接口實(shí)現(xiàn)互連玩具的基本架構(gòu)
今天,用 Android 或者 iOS 手機(jī)或平板電腦連接、控制的玩具已很常見,而集成了采用藍(lán)牙和 Wi-Fi 無線連接功能各種玩具則出現(xiàn)了爆炸式增長(zhǎng)。...
高級(jí)駕駛員輔助系統(tǒng)(ADAS)TDA2x SoC的前置攝像頭應(yīng)用介紹
用于高級(jí)駕駛員輔助系統(tǒng)(ADAS)的TDA2x SoC第4課第2部分-前置攝像頭應(yīng)用

分辨率這個(gè)詞是從攝像頭沿用而來,攝像頭拍出來的單幅圖像,其像素點(diǎn)均勻分布在橫縱兩個(gè)維度的畫面中,因此「橫向像素點(diǎn) x 縱向像素點(diǎn)」就能直接反映出攝像頭分...
了解快門是工業(yè)相機(jī)中一個(gè)重要組成部分,它的組成結(jié)構(gòu)、形式及功能是衡量照相機(jī)檔次的一個(gè)重要因素。
2022-11-01 標(biāo)簽:傳感器攝像頭工業(yè)相機(jī) 3821 0

顧名思義,主要是通過控制可控開關(guān)的開關(guān)時(shí)間配合降壓斬波電路(Buck電路)和升壓斬波電路(Boost電路)實(shí)現(xiàn)升壓降壓;
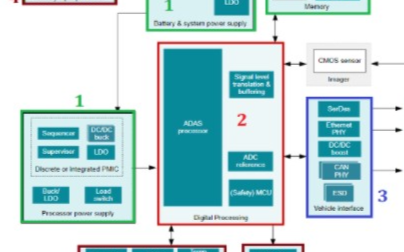
關(guān)于自動(dòng)駕駛系統(tǒng)中前視攝像頭的供電模塊
自動(dòng)駕駛技術(shù),作為出行安全和效率提升的有效途徑,獲得了汽車等相關(guān)產(chǎn)業(yè)的廣泛關(guān)注。而隨著計(jì)算機(jī)視覺系統(tǒng)的日益成熟,前視攝像頭 (front camera)...
2021-12-16 標(biāo)簽:模塊攝像頭自動(dòng)駕駛 3742 0

SLAM(Simultaneous Localization and Mapping)同步定位與地圖構(gòu)建,一種同時(shí)實(shí)現(xiàn)設(shè)備自身定位和環(huán)境地圖構(gòu)建的技術(shù)。
基于YOLOv2模型的監(jiān)控系統(tǒng)喪失對(duì)人物的識(shí)別能力,從而實(shí)現(xiàn)在攝像頭下順利”隱身”的效果
實(shí)驗(yàn)中,被 Toon Goedemé 和他的團(tuán)隊(duì)”迷惑”的攝像頭,使用著名的 YOLOv2 卷積神經(jīng)網(wǎng)絡(luò)。YOLOv2 屬于實(shí)時(shí)對(duì)象識(shí)別模型,它的結(jié)構(gòu)是...
2019-04-29 標(biāo)簽:神經(jīng)網(wǎng)絡(luò)監(jiān)控系統(tǒng)攝像頭 3715 0

基于攝像頭技術(shù)的智能車賽道信息檢測(cè)方案研究
在去年的Freescale全國大學(xué)生智能車大賽中,賽道信息檢測(cè)方案總體上有兩大類:光電傳感器方案和攝像頭方案。前者電路設(shè)計(jì)簡(jiǎn)單、信息檢測(cè)頻率高,但檢測(cè)范...
2021-01-15 標(biāo)簽:傳感器攝像頭計(jì)數(shù)器 3629 0
工廠視頻監(jiān)控系統(tǒng)的應(yīng)用需求及設(shè)計(jì)方案分析
部署在工廠的網(wǎng)絡(luò)視頻監(jiān)控系統(tǒng)需要具有對(duì)生產(chǎn)車間的工人情況進(jìn)行集中遠(yuǎn)程視頻監(jiān)控和管理,讓管理者不需要進(jìn)入監(jiān)控室即能輕松的實(shí)現(xiàn)監(jiān)控的目的。并且綜合工人的勞動(dòng)...
2020-11-14 標(biāo)簽:視頻監(jiān)控監(jiān)控系統(tǒng)攝像頭 3623 0
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動(dòng)駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺 | 無人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1



