 電子發(fā)燒友App
電子發(fā)燒友App


作者:沈壽林,肖毅,朱江,白承森
簡介
為提高作戰(zhàn)指揮態(tài)勢理解效率,掌握敵方作戰(zhàn)意圖,對作戰(zhàn)指揮態(tài)勢理解進(jìn)行了研究分析。首先,在仿真推演基礎(chǔ)上,建立了知識發(fā)現(xiàn)方法池,提出了基于智能算法的態(tài)勢理解方法;然后,以戰(zhàn)術(shù)層面敵方坦克分隊作戰(zhàn)意圖識別為例,說明了智能算法在挖掘和識別敵方作戰(zhàn)意圖的應(yīng)用方法和路徑;最后,試驗結(jié)果表明,深度學(xué)習(xí)和長短時記憶(LSTM)網(wǎng)絡(luò)算法對意圖識別問題具有較高的識別準(zhǔn)確率。該研究可為指揮員提升作戰(zhàn)指揮態(tài)勢理解能力、開展智能算法在作戰(zhàn)指揮態(tài)勢理解中的應(yīng)用研究提供參考。
引言
在戰(zhàn)爭信息化進(jìn)程中,掌握信息是取得戰(zhàn)爭優(yōu)勢的重要因素,其中態(tài)勢理解是重要的一環(huán)。態(tài)勢理解指將生成的態(tài)勢特征向量與領(lǐng)域?qū)<抑R結(jié)合,判斷敵方的進(jìn)攻、防御、行軍、欺騙和集結(jié)等戰(zhàn)略部署,以識別敵方的作戰(zhàn)意圖和作戰(zhàn)計劃。態(tài)勢理解是美國心理學(xué)Mica Endsley博士于1995年提出的三層次態(tài)勢感知模型中的第2層次,其實質(zhì)是通過對周圍環(huán)境要素的觀察,獲得一個態(tài)勢分析評估畫面,所達(dá)到的理解程度標(biāo)志著人的專業(yè)知識水平。態(tài)勢理解包括對戰(zhàn)場“狀態(tài)”的認(rèn)知和作戰(zhàn)“趨勢”的預(yù)測,是指揮員決策的依據(jù)和基礎(chǔ)。美國陸軍訓(xùn)練與條令司令部在2015年發(fā)布TRADOCPAM535-3-1文件,其中指出:未來的陸軍將發(fā)展和保持高水平的戰(zhàn)場態(tài)勢理解能力,以應(yīng)對在復(fù)雜環(huán)境下,提高與堅決而靈活的對手組織作戰(zhàn)的能力。現(xiàn)代戰(zhàn)爭的戰(zhàn)場態(tài)勢具有明顯的復(fù)雜性特征,戰(zhàn)爭的深度和復(fù)雜性呈指數(shù)級增長,僅通過人類的知識、經(jīng)驗和現(xiàn)有的輔助決策系統(tǒng)來分析戰(zhàn)場態(tài)勢,不足以在復(fù)雜戰(zhàn)場環(huán)境中快速提供可靠的態(tài)勢理解結(jié)果,這將明顯影響作戰(zhàn)指揮效能。因此,傳統(tǒng)的基于線性理論的態(tài)勢理解方法已很難滿足作戰(zhàn)任務(wù)的需要。
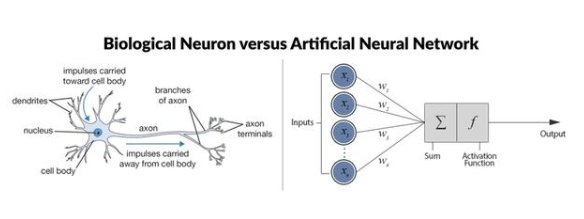
深度學(xué)習(xí)算法可以為提高戰(zhàn)場態(tài)勢理解智能水平提供強有力的支持。隨著人工智能技術(shù)飛速發(fā)展,計算智能、感知智能和認(rèn)知智能是人工智能發(fā)展的3個階段,反映了人工智能從低級到高級的發(fā)展水平。在前面2個階段,機器的功能已超過了人類,而深度學(xué)習(xí)能幫助機器提高認(rèn)知智能。2006年,深度學(xué)習(xí)算法之父Geoffrey Hinton教授提出了深度學(xué)習(xí)算法具有較強的非線性處理能力和逐層理解能力,是研究人腦、語音識別、圖像處理、視覺處理和自然語音處理的重要智能算法技術(shù),是解決戰(zhàn)場態(tài)勢理解問題行之有效的方法。
文給出了一種基于深度學(xué)習(xí)算法的態(tài)勢理解方法,分析了該智能算法在態(tài)勢理解中的應(yīng)用方本式;提出了基于知識發(fā)現(xiàn)方法的態(tài)勢理解技術(shù)路徑;介紹了基于大數(shù)據(jù)、智能算法的態(tài)勢理解知識發(fā)現(xiàn)的流程。最后,以戰(zhàn)術(shù)層級作戰(zhàn)意圖識別問題為例,對比分析了傳統(tǒng)作戰(zhàn)意圖識別方法和基于深度學(xué)習(xí)算法的作戰(zhàn)意圖識別方法;以合成部隊坦克分隊?wèi)?zhàn)術(shù)意圖識別問題為例,探討了深度學(xué)習(xí)長短時記憶(LSTM)網(wǎng)絡(luò)算法在態(tài)勢理解作戰(zhàn)意圖識別中的應(yīng)用,試驗結(jié)果證明,深度學(xué)習(xí)LSTM網(wǎng)絡(luò)算法對作戰(zhàn)意圖識別問題具有較高的識別準(zhǔn)確率和較好的收斂函數(shù)值,能有效提高復(fù)雜戰(zhàn)場環(huán)境下作戰(zhàn)指揮態(tài)勢理解效率。
應(yīng)用方法
在基于智能算法的態(tài)勢理解過程中,智能算法主要應(yīng)用于態(tài)勢目標(biāo)特征匹配、時效性判斷和態(tài)勢要素分析等活動,并準(zhǔn)確生成態(tài)勢產(chǎn)品,為指揮員決策提供支持。該過程主要分為3個步驟:1) 創(chuàng)建與任務(wù)知識需求相對應(yīng)的模板;2) 根據(jù)作戰(zhàn)任務(wù)要求,明確戰(zhàn)場態(tài)勢理解知識發(fā)現(xiàn)的目標(biāo);3) 利用應(yīng)用領(lǐng)域已有的知識,建立與戰(zhàn)場態(tài)勢數(shù)據(jù)特點相對應(yīng)的規(guī)則庫;4) 在規(guī)則庫支持下,進(jìn)一步推測生成戰(zhàn)場態(tài)勢產(chǎn)品。例如,在對敵戰(zhàn)術(shù)層級作戰(zhàn)意圖識別問題中,知識發(fā)現(xiàn)模式中的結(jié)構(gòu)模式(動作間的任務(wù)劃分關(guān)系)和序列模式(動作間的時序關(guān)系)對于分析戰(zhàn)術(shù)層面的作戰(zhàn)意圖識別是有效的。在該類識別過程中,通過調(diào)用這2種模式,可以提高戰(zhàn)術(shù)層面作戰(zhàn)意圖識別和預(yù)測的效率。智能算法在態(tài)勢理解中主要應(yīng)用如圖1所示。
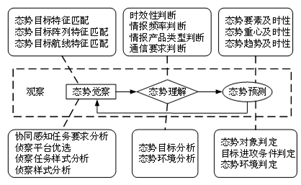
圖1? 智能算法在態(tài)勢理解中應(yīng)用
1.1? 知識發(fā)現(xiàn)方法池
基于智能算法的態(tài)勢理解方法主要通過構(gòu)建知識發(fā)現(xiàn)方法池實現(xiàn),包括關(guān)聯(lián)規(guī)則發(fā)現(xiàn)方法、粗糙集方法、深度學(xué)習(xí)算法以及數(shù)據(jù)庫方法。根據(jù)情境分析任務(wù)的不同需要和數(shù)據(jù)的特點,選擇適當(dāng)方法或綜合采用不同方法。還可根據(jù)實際問題對現(xiàn)有的知識發(fā)現(xiàn)方法進(jìn)行改進(jìn),使改進(jìn)后的方法更有利于應(yīng)對新環(huán)境和新問題。利用知識發(fā)現(xiàn)技術(shù),挖掘隱含的、有用的、未被發(fā)現(xiàn)的信息和知識(如規(guī)則、模型和約束等),并提供給決策者。基于知識發(fā)現(xiàn)方法池的智能態(tài)勢理解流程如圖2所示。
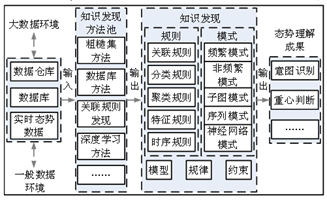
圖2? 基于知識發(fā)現(xiàn)方法池的智能態(tài)勢理解流程
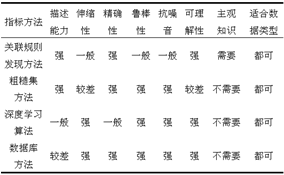
知識發(fā)現(xiàn)方法池主要技術(shù)方法對比如表1所示。不同的知識發(fā)現(xiàn)方法具有不同指標(biāo)特征,導(dǎo)致不同知識發(fā)現(xiàn)方法的應(yīng)用領(lǐng)域也不同。知識發(fā)現(xiàn)的輸出是規(guī)則、模式、模型和約束等知識元素。規(guī)則可劃分為關(guān)聯(lián)規(guī)則、分類規(guī)則以及聚類規(guī)則;模式可分為頻繁模式、子圖模式和序列模式。同樣,這些知識發(fā)現(xiàn)結(jié)果也有不同的特點和用途。
表1? 知識發(fā)現(xiàn)方法池主要技術(shù)方法對比
知識發(fā)現(xiàn)方法的輸入是各類數(shù)據(jù),輸出是各型知識,在明確輸入、輸出性質(zhì)后,可針對性選擇方法。通過探索性評估取出最有價值的方法范例,在后期系統(tǒng)開發(fā)實現(xiàn)時,將相關(guān)知識發(fā)現(xiàn)過程建模成工作流,把相關(guān)方法建成工具和服務(wù)。知識發(fā)現(xiàn)、數(shù)據(jù)挖掘和深度學(xué)習(xí)算法領(lǐng)域有很多交叉,共同構(gòu)成了戰(zhàn)場態(tài)勢理解知識發(fā)現(xiàn)的技術(shù)池。對于態(tài)勢理解而言,戰(zhàn)場是不斷變化的,甚至是戰(zhàn)勝不復(fù)的,利用固化的知識庫在面對未來復(fù)雜的戰(zhàn)場態(tài)勢時難免力不從心,所以有必要使用深度學(xué)習(xí)算法。探究深度學(xué)習(xí)算法應(yīng)用,理解數(shù)據(jù),分析結(jié)果,并在不確定條件下進(jìn)行邏輯推理,以支持態(tài)勢理解輔助決策。將深度學(xué)習(xí)算法運用于戰(zhàn)場態(tài)勢理解,解決既有知識,可固化知識庫難以支撐的、復(fù)雜深層的戰(zhàn)場態(tài)勢理解問題。
1.2? 知識發(fā)現(xiàn)流程
在大數(shù)據(jù)環(huán)境中,大數(shù)據(jù)關(guān)注數(shù)據(jù)的相關(guān)性或關(guān)聯(lián)性,這是大數(shù)據(jù)預(yù)測的關(guān)鍵。態(tài)勢理解中態(tài)勢信息數(shù)據(jù)具有典型的大數(shù)據(jù)特征,數(shù)據(jù)間存在相關(guān)性,具有一定的模糊性,新環(huán)境和新問題要求研究基于大數(shù)據(jù)的態(tài)勢理解知識發(fā)現(xiàn)流程和方法。基于大數(shù)據(jù)、智能算法的態(tài)勢理解知識發(fā)現(xiàn)流程如圖3所示。
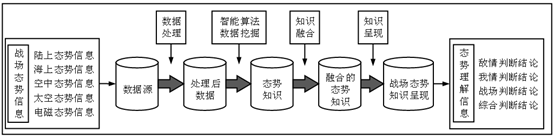
圖3? 態(tài)勢理解知識發(fā)現(xiàn)流程
1) 態(tài)勢數(shù)據(jù)獲取。通過現(xiàn)代偵察預(yù)警衛(wèi)星、有人(無人)偵察機、戰(zhàn)場偵察雷達(dá)和各種戰(zhàn)場傳感器,接收各情報單位提供的戰(zhàn)場態(tài)勢信息。戰(zhàn)場態(tài)勢信息數(shù)據(jù)包括敵情、我情和戰(zhàn)場環(huán)境等數(shù)據(jù)。數(shù)據(jù)類型包括文本、音頻、戰(zhàn)場影像及視頻情報等。
2) 態(tài)勢數(shù)據(jù)處理。首先,通過對態(tài)勢數(shù)據(jù)的整理、整合、變換和歸約等方式對態(tài)勢數(shù)據(jù)進(jìn)行預(yù)處理,處理內(nèi)容包括噪聲數(shù)據(jù)去除、數(shù)據(jù)不完整性以及數(shù)據(jù)不一致性處理等;其次,對數(shù)據(jù)采取平滑和聚集等規(guī)范化處理,這是數(shù)據(jù)壓縮和轉(zhuǎn)換的必要步驟。
3) 態(tài)勢數(shù)據(jù)挖掘。數(shù)據(jù)挖掘是從戰(zhàn)場態(tài)勢信息數(shù)據(jù)中,通過智能算法搜索隱含的高價值信息的過程,是態(tài)勢理解知識發(fā)現(xiàn)的重要環(huán)節(jié)。通過對數(shù)據(jù)分類、聚類、預(yù)測和關(guān)聯(lián)的分析和研究,將原始數(shù)據(jù)從基礎(chǔ)信息抽象為符合用戶需求的高級知識,實現(xiàn)從大量、不完全和模糊的數(shù)據(jù)中發(fā)現(xiàn)戰(zhàn)場態(tài)勢知識。
4) 態(tài)勢知識融合。態(tài)勢知識融合是對不同信息來源的戰(zhàn)場態(tài)勢知識進(jìn)行收集、過濾、匯總?cè)诤戏謩e生成專題綜合態(tài)勢知識的過程,對戰(zhàn)場態(tài)勢的輔助分析和指揮員高效的指揮決策具有重要作用。
5) 態(tài)勢知識呈現(xiàn)。通過研究、提取和可視化最有價值的戰(zhàn)場態(tài)勢知識,把態(tài)勢理解知識以知識圖譜、虛擬現(xiàn)實和增強現(xiàn)實等易于用戶理解的方式傳遞給用戶。其中,知識圖譜是一種基于圖的真實世界語義描述模型,它為態(tài)勢理解知識的呈現(xiàn)提供了一種新技術(shù)。
應(yīng)用實例
在分析了基于智能算法的態(tài)勢理解方法后,本章以態(tài)勢理解中戰(zhàn)術(shù)層級作戰(zhàn)意圖識別問題為例,重點說明智能算法在態(tài)勢理解中的實際應(yīng)用過程。推理敵方作戰(zhàn)意圖的過程主要在作戰(zhàn)準(zhǔn)備階段完成,即結(jié)合軍事領(lǐng)域?qū)<业膶I(yè)軍事知識以及推理生成的戰(zhàn)場態(tài)勢特征,來判斷解讀當(dāng)前的戰(zhàn)場態(tài)勢,是對敵方進(jìn)一步行動計劃的預(yù)測。作戰(zhàn)意圖識別是一個復(fù)雜的認(rèn)知過程,是軍事指揮員關(guān)注的重點。目前的作戰(zhàn)意圖識別方法主要集中在解決戰(zhàn)術(shù)層面的作戰(zhàn)意圖識別問題,具有一定的實用價值。本文在現(xiàn)有態(tài)勢評估專家知識基礎(chǔ)上,分析判斷戰(zhàn)場態(tài)勢,確定敵方作戰(zhàn)意圖類別,為指揮員決策提供依據(jù)。
傳統(tǒng)的作戰(zhàn)意圖識別方法,使用數(shù)據(jù)對比、數(shù)據(jù)場和信息熵等方法,并不能很好地解決目前的作戰(zhàn)意圖識別問題。現(xiàn)有輔助決策不能以人的認(rèn)知模式來識別判斷敵方作戰(zhàn)意圖,難以適應(yīng)新形勢的需要。然而,深度學(xué)習(xí)算法是一種符合人的認(rèn)知機制以及知識分析的“大腦”學(xué)習(xí)機制,這是一種貼近人類的思維模式,具有生成“自我意識”的功能,可以模仿指揮員的聯(lián)想、感知、假設(shè)、邏輯推導(dǎo)和學(xué)習(xí)等思維過程。該過程不需要太多的生成規(guī)則,它通過特征提取來達(dá)到知識學(xué)習(xí)的目的。通過大量數(shù)據(jù)訓(xùn)練得到的深度神經(jīng)網(wǎng)絡(luò)包含了整體的知識結(jié)構(gòu),更適合描述復(fù)雜的作戰(zhàn)意圖識別問題。不同于傳統(tǒng)的意圖識別方法,運用深度學(xué)習(xí)算法具有顯著優(yōu)勢。
2.1? 基于模板匹配的作戰(zhàn)意圖識別
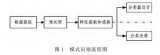
Gw.Hopple等的戰(zhàn)場情報信息準(zhǔn)備系統(tǒng)和David.F.Noble的基于規(guī)劃模板的海戰(zhàn)意圖識別系統(tǒng)都通過模板匹配來實現(xiàn)敵方作戰(zhàn)意圖識別。
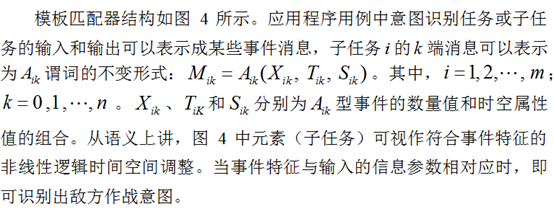
圖4? 模板匹配器結(jié)構(gòu)
2.2? 基于深度學(xué)習(xí)算法的作戰(zhàn)意圖識別
與傳統(tǒng)方法相比,基于深度學(xué)習(xí)算法的作戰(zhàn)意圖識別方法在戰(zhàn)場態(tài)勢理解
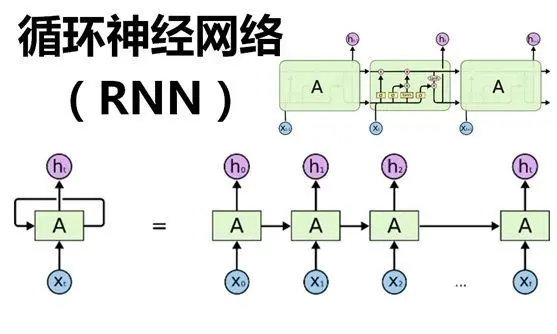
方面具有巨大的技術(shù)優(yōu)勢,在戰(zhàn)役和戰(zhàn)術(shù)層面的作戰(zhàn)意圖識別應(yīng)用中具有良好的研究和推廣價值。深度學(xué)習(xí)算法可有效解決算法模型屬性特征與作戰(zhàn)意圖之間的映射關(guān)系。在深度學(xué)習(xí)算法中,將目標(biāo)的意圖識別特征向量信息作為樣本輸入深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò),采用調(diào)整深度神經(jīng)網(wǎng)絡(luò)節(jié)點權(quán)值的方法來判斷敵人的作戰(zhàn)意圖。深度神經(jīng)網(wǎng)絡(luò)隱含層較深,后神經(jīng)網(wǎng)絡(luò)層可利用前神經(jīng)網(wǎng)絡(luò)層獲得的作戰(zhàn)意圖原始特征,獲取更高層次的作戰(zhàn)意圖特征信息,從而達(dá)到更好的作戰(zhàn)意圖識別目的。敵改變作戰(zhàn)意圖即敵人戰(zhàn)術(shù)行動特征發(fā)生變化,以敵方戰(zhàn)術(shù)特征數(shù)據(jù)作為模型輸入,可以有效降低樣本維數(shù),減少累積誤差,保持目標(biāo)的戰(zhàn)術(shù)信息。深度學(xué)習(xí)算法中LSTM網(wǎng)絡(luò)算法在序列建模問題上具有一定優(yōu)勢,具有長時記憶功能,可只保存與戰(zhàn)術(shù)特征相關(guān)的數(shù)據(jù)進(jìn)行戰(zhàn)術(shù)意圖預(yù)測,而丟棄不相關(guān)數(shù)據(jù),能較好構(gòu)建戰(zhàn)術(shù)行動過程和作戰(zhàn)意圖特征值時間序列之間的對應(yīng)關(guān)系。LSTM網(wǎng)絡(luò)算法這一網(wǎng)絡(luò)特性與戰(zhàn)術(shù)行動的時間序列特性是一致的,因此在作戰(zhàn)意圖識別問題中主要采用LSTM網(wǎng)絡(luò)算法。基于深度學(xué)習(xí)算法的作戰(zhàn)意圖識別模型如圖5所示。
圖5? 基于深度學(xué)習(xí)算法的作戰(zhàn)意圖識別模型
2.3 ?基于深度學(xué)習(xí)算法的作戰(zhàn)意圖識別仿真試驗
試驗以合成部隊坦克分隊與敵遭遇戰(zhàn)斗為背景,以作戰(zhàn)籌劃過程中態(tài)勢理解階段對敵方坦克分隊?wèi)?zhàn)術(shù)行動意圖識別為研究對象。在智能作戰(zhàn)試驗平臺上運用深度學(xué)習(xí)算法,采用作戰(zhàn)仿真訓(xùn)練數(shù)據(jù)進(jìn)行作戰(zhàn)意圖識別試驗。智能作戰(zhàn)試驗平臺是集成了人工智能算法的綜合試驗平臺。
2.3.1? 模型設(shè)計與實現(xiàn)
試驗采用了合成部隊坦克分隊?wèi)?zhàn)術(shù)行動意圖數(shù)據(jù)集,即地面各作戰(zhàn)單元對應(yīng)20?s的屬性特征值,其中包括速度、加速度、運動方向角、經(jīng)度、緯度、高程、己方間距和雙方距離等作戰(zhàn)行動標(biāo)簽數(shù)據(jù),每個戰(zhàn)術(shù)行動意圖數(shù)據(jù)集大小為2?000組。數(shù)據(jù)來源主要為原始采集信息數(shù)據(jù)、智能作戰(zhàn)試驗平臺訓(xùn)練采集數(shù)據(jù)以及智能作戰(zhàn)試驗平臺生成模型實際應(yīng)用生成的數(shù)據(jù)。在對抗演練和仿真試驗中,按照敵方坦克分隊執(zhí)行任務(wù)不同,其主要戰(zhàn)術(shù)行動意圖可分為沖擊、防御、控要、機動、伏擊、反沖擊和撤退7種方式。基于深度學(xué)習(xí)算法作戰(zhàn)意圖識別模型應(yīng)用如圖6所示。
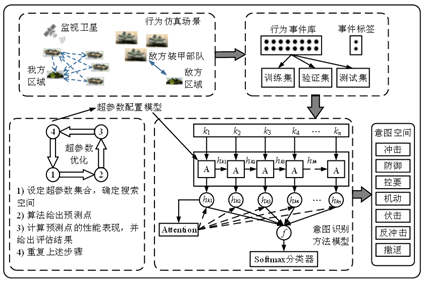
圖6? 基于深度學(xué)習(xí)算法作戰(zhàn)意圖識別模型應(yīng)用
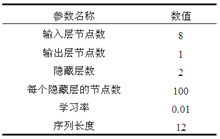
不同隱含層級和節(jié)點數(shù)導(dǎo)致不同的深度學(xué)習(xí)算法識別效果,因此需設(shè)定算法恰當(dāng)?shù)碾[藏層級和節(jié)點數(shù)。同時,學(xué)習(xí)率的選擇對深度學(xué)習(xí)算法的應(yīng)用效果也有較大影響。如果設(shè)置的學(xué)習(xí)率太大,則可能跳過最佳解決方案,從而產(chǎn)生不佳的識別效果;如果設(shè)定的學(xué)習(xí)率太小,則訓(xùn)練速度相對較慢。網(wǎng)絡(luò)結(jié)構(gòu)的調(diào)整和確定由訓(xùn)練集決定。測試集主要用于測試評估深度學(xué)習(xí)算法運用效果。利用智能作戰(zhàn)試驗平臺,從仿真訓(xùn)練集中隨機選取訓(xùn)練集來訓(xùn)練深度學(xué)習(xí)算法模型,調(diào)整算法模型神經(jīng)元權(quán)值。最終選用的LSTM網(wǎng)絡(luò)算法參數(shù)如表2所示。
表2? 長短時記憶網(wǎng)絡(luò)算法參數(shù)
2.3.2? 試驗結(jié)果
在試驗過程中,將坦克分隊7種戰(zhàn)術(shù)行動意圖共2?000個樣本數(shù)據(jù)隨機分為80%訓(xùn)練集和20%測試集。圖7顯示了LSTM網(wǎng)絡(luò)算法模型在上述7種戰(zhàn)術(shù)行動意圖數(shù)據(jù)集上的綜合訓(xùn)練與測試結(jié)果。如圖7所示,對敵7種戰(zhàn)術(shù)行動意圖識別準(zhǔn)確率隨著訓(xùn)練次數(shù)的增加而增加,在訓(xùn)練1?200步以后趨于穩(wěn)定接近于100%;隨著訓(xùn)練次數(shù)的增加,損失函數(shù)的值逐漸減小,1?200步后趨于0。該結(jié)果符合一般深度學(xué)習(xí)算法模型的訓(xùn)練過程。可以看出,LSTM網(wǎng)絡(luò)算法對于敵方坦克分隊?wèi)?zhàn)術(shù)行動意圖識別問題具有良好的識別準(zhǔn)確率和收斂性。
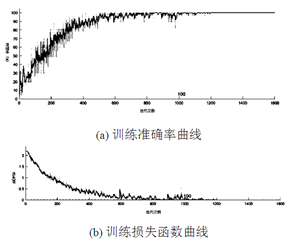
圖7 ?模型訓(xùn)練準(zhǔn)確率和損失函數(shù)圖
結(jié)束語
本文根據(jù)信息時代戰(zhàn)場態(tài)勢理解的軍事要求,探討了在戰(zhàn)場態(tài)勢理解問題中運用智能算法的途徑,建立了基于知識發(fā)現(xiàn)方法池的態(tài)勢理解方法,提出了運用智能算法解決態(tài)勢理解問題的知識發(fā)現(xiàn)流程。以陸戰(zhàn)場態(tài)勢理解中對敵方坦克分隊?wèi)?zhàn)術(shù)行動意圖識別為例,采用深度學(xué)習(xí)算法中LSTM網(wǎng)絡(luò)算法進(jìn)行作戰(zhàn)意圖識別。試驗結(jié)果表明,該作戰(zhàn)意圖識別方法具有較好的準(zhǔn)確率和收斂性,證明了該方法的有效性。總的來說,作戰(zhàn)指揮態(tài)勢理解智能算法應(yīng)用研究還處于起步階段,相關(guān)理論研究還在不斷深化,在實際應(yīng)用層面還需更深入的探討。
編輯:黃飛



















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論