電路板調(diào)試請(qǐng)按照這5個(gè)步驟!
2019-07-01 09:57:03 9551
9551 調(diào)試參數(shù)在嵌入式開(kāi)發(fā)中再常見(jiàn)不過(guò)了,比如濾波系數(shù)、PID參數(shù),以及一些簡(jiǎn)單的模式參數(shù)切換、寫(xiě)入和讀取等等。
2022-10-19 14:31:06974 PID-PID控制器參數(shù)整定與實(shí)現(xiàn)
2020-05-12 11:30:36
=1,0時(shí),明顯看到系統(tǒng)靜差還沒(méi)消除,更別談NowVal變化要快。所以圖1I參數(shù)小了。 PID=0時(shí),看到系統(tǒng)靜差已消除,但是NowVal上升慢,還需增大I。調(diào)試看到這種情況,當(dāng)慢慢增大某個(gè)參數(shù)
2020-06-23 14:54:44
PID參數(shù)設(shè)置指南電機(jī)控制很多都用到PID控制,那么PID控制怎么設(shè)置呢? 啟動(dòng)PID參數(shù)自整定程序,可自動(dòng)計(jì)算PID參數(shù),自整定成功率95%,少數(shù)自整定不成功的系統(tǒng)可按以下方法調(diào)PID參數(shù)。P
2016-02-01 18:08:45
PID參數(shù)的基本調(diào)試方法是什么?
2021-11-15 07:01:02
設(shè)計(jì)PID控制器時(shí),通過(guò)階躍響應(yīng)曲線(xiàn)法得到了被控對(duì)象的傳遞函數(shù)(為二階系統(tǒng)),請(qǐng)問(wèn)PID參數(shù)如何計(jì)算?看了很多資料,都是有工程整定的方法調(diào)試出來(lái)的,那么什么是理論計(jì)算法?有知道的可以指點(diǎn)一下不
2017-08-12 16:38:35
新人一枚,求大神講解下PID調(diào)試原理,盡量通俗點(diǎn),謝謝
2014-11-14 21:50:45
圖。 程序上采用了主程序,子程序,中斷程序的結(jié)構(gòu)模式,程序清晰,明了,大大縮短了周期掃描時(shí)間。4. 調(diào)試程序 選擇PID的參數(shù),以及相互間的配合,可以影響PID控制的穩(wěn)定性。如采樣時(shí)間過(guò)短對(duì)外部信號(hào)
2012-01-04 13:57:24
汽車(chē)電控的PID調(diào)試經(jīng)驗(yàn)
2017-09-19 16:21:19
自己弄到的一些PID調(diào)試的資料,可以參考一下。
2016-07-11 11:33:39
0、前言在我看來(lái),其實(shí)控制題是較好做(混)的一種題型,你懂我意思吧。控制題簡(jiǎn)單概括下,大概就是三個(gè)步驟。1、構(gòu)建整體方案。2、設(shè)計(jì)整體控制電路。3、軟件程序設(shè)計(jì)—PID算法調(diào)試。1 、整體方案拿到
2021-11-30 06:34:42
的系統(tǒng),這樣系統(tǒng)階躍響應(yīng)的穩(wěn)態(tài)誤差就為零。由于自動(dòng)控制系統(tǒng)被控對(duì)象的千差萬(wàn)別,PID的參數(shù)也必須隨之變化,以滿(mǎn)足系統(tǒng)的性能要求。這就給使用者帶來(lái)相當(dāng)?shù)穆闊貏e是對(duì)初學(xué)者。下面簡(jiǎn)單介紹一下調(diào)試PID參數(shù)
2016-03-23 10:10:07
技術(shù)小白想請(qǐng)教一下,我把我的PID程序燒錄進(jìn)STM32F407板子里面之后,我想用labview做上位機(jī)接收程序里面的一些參數(shù),并且通過(guò)Labview對(duì)板子程序里PID參數(shù)進(jìn)行調(diào)參,就像在Keil里面的debug在線(xiàn)調(diào)試一樣,請(qǐng)問(wèn)能實(shí)現(xiàn)這樣的功能嗎?有沒(méi)有大神有教程能指導(dǎo)一下,萬(wàn)分感謝
2019-05-06 15:58:47
Matlab是如何用系統(tǒng)辨識(shí)并進(jìn)行PID參數(shù)調(diào)節(jié)呢?有哪些基本步驟呢?
2021-11-19 06:27:42
目前調(diào)試的參數(shù)如圖,定高模式飛機(jī)垂直起飛后會(huì)往左(X軸)緩慢的往下掉(Z軸),代碼沒(méi)有魔改過(guò)。求有調(diào)好的大神們給我點(diǎn)調(diào)試參數(shù)或者調(diào)試方法,讓飛機(jī)定高之后不會(huì)前后左右飄。
2019-06-25 04:36:03
如何去實(shí)現(xiàn)STM32電機(jī)的PID參數(shù)整定?如何去編寫(xiě)STM32電機(jī)的PID參數(shù)整定的代碼?
2021-09-23 08:07:13
文章目錄是什么是PID參數(shù)調(diào)整增量式PID是什么是PIDP:比例proportionalI:積分integralD:微分derivative參數(shù)調(diào)整Kp:比例系數(shù):讓偏差(目標(biāo)減去當(dāng)前)與調(diào)節(jié)裝置
2022-01-20 06:44:16
在使用伺服驅(qū)動(dòng)器過(guò)程中,我們都需要進(jìn)行驅(qū)動(dòng)器的調(diào)試。其中最關(guān)鍵的參數(shù)調(diào)試莫過(guò)于PID參數(shù)整定了。很多小白在這方面往往經(jīng)驗(yàn)欠缺,不知從何入手,這里介紹一下PID參數(shù)的基本調(diào)試方法,幫助大家快速掌握入門(mén)
2021-09-17 09:34:29
伺服控制的基本原理是什么?伺服PID怎么進(jìn)行調(diào)試的?
2021-09-29 06:10:58
一直以來(lái),關(guān)于PID整定都在進(jìn)行手動(dòng)調(diào)試,例如試湊法、1/4衰減曲線(xiàn)法、齊格勒-尼柯?tīng)査拐ǚǖ龋?雖然上述方法都可以完成對(duì)參數(shù)的整定,但是需要非常豐富的調(diào)試經(jīng)驗(yàn)才能達(dá)到預(yù)期的目的。同時(shí),當(dāng)需要控制
2021-08-31 08:41:30
整套溫度控制系統(tǒng)選用DAQ板卡控制,通過(guò)DO數(shù)字輸出控制加熱絲脈沖加熱,以TC卡鏈接熱電偶,監(jiān)測(cè)溫度變化;程序結(jié)構(gòu)如圖:通過(guò)初始化PID參數(shù)調(diào)節(jié)出來(lái)的波形圖跟理想的PID控制圖完全不一致,問(wèn)問(wèn)
2015-05-05 16:20:33
1. 用戶(hù)接口2. 控制電路接線(xiàn)3.BOP-2操作面板4.變頻器參數(shù)設(shè)置調(diào)試一臺(tái)新變頻器時(shí),一般需要經(jīng)過(guò)三個(gè)步驟:參數(shù)復(fù)位、快速調(diào)試、功能調(diào)試使用BOP-2操作面板進(jìn)行快速調(diào)試啟動(dòng)快速調(diào)試前提條件
2021-09-03 09:34:06
的,四軸總結(jié)一句話(huà)就是燒錢(qián)。會(huì)給你后期調(diào)試PID帶來(lái)很大的好處。電機(jī)越好控制效果越精準(zhǔn),轉(zhuǎn)速差異就越小。這里還有就是電機(jī)和漿的配置這個(gè)網(wǎng)上有很多普及的帖子在這就不細(xì)談了。3.其他的對(duì)于機(jī)架和電池大家盡量
2019-07-23 22:10:21
電機(jī)PID調(diào)試電機(jī)PID調(diào)試一、直流電機(jī)原理與TB66121.1電機(jī)原理電機(jī)PID調(diào)試一、直流電機(jī)原理與TB66121.1電機(jī)原理
2021-09-07 09:10:49
如何改善電機(jī)的PID參數(shù)
2023-10-30 06:46:01
法整定PID參數(shù)步驟1、將調(diào)節(jié)器積分時(shí)間設(shè)定為無(wú)窮大、微分時(shí)間設(shè)定為零(即Ti=∞,Td=0),比例度適當(dāng)取值,調(diào)節(jié)系統(tǒng)按純比例作用投入。穩(wěn)定后,適當(dāng)減小比例度,在外界干擾作用下,觀(guān)察過(guò)程變化情況,尋
2017-12-26 21:40:51
控制電機(jī)PID的結(jié)構(gòu)和參數(shù)算法選擇在電機(jī)控制中,無(wú)論是DTC控制方法還是FOC控制方法,最后都要基于PID控制器來(lái)實(shí)現(xiàn)。想與大家具體的討論下對(duì)PID控制器的自己的理解和感悟PID結(jié)構(gòu)圖如下
2016-01-29 16:50:21
得到滿(mǎn)意的控制參數(shù)。為便于記憶和操作,儀表師傅們將這些經(jīng)驗(yàn)總結(jié)為一個(gè)PID參數(shù)整定口訣,即: 參數(shù)整定找最佳,從小到大順序查 先是比例后積分,最后再把微分加 曲線(xiàn)振蕩很頻繁,比例度盤(pán)要放大 曲線(xiàn)漂浮繞
2017-11-14 09:06:47
自動(dòng)控制系統(tǒng)可分為哪幾種?PID控制的原理和特點(diǎn)分別是什么?PID控制器的參數(shù)整定有哪些步驟?PID控制的案例有哪些?
2021-08-26 07:40:33
在某種特定環(huán)境下調(diào)試之后得到的一組接近最優(yōu)的PID參數(shù),然而對(duì)于一些非線(xiàn)性時(shí)變系統(tǒng)而言,其工作環(huán)境是時(shí)刻變
2021-08-17 06:13:13
PID yunrun.com.cn/tech/681.html用經(jīng)驗(yàn)法整定PID參數(shù)又稱(chēng)為試湊法,是廣大儀表工數(shù)十年整定經(jīng)驗(yàn)的積累,是應(yīng)用最為廣泛的一種調(diào)節(jié)器參數(shù)整定方法。它就是根據(jù)儀表工的經(jīng)驗(yàn)
2018-01-04 21:07:26
萌新求助,關(guān)于模糊PID控制仿真步驟是怎樣的?
2021-10-13 09:01:05
PID的作用是什么?請(qǐng)問(wèn)matlab里的pid參數(shù)怎么調(diào)節(jié)?
2021-11-01 07:22:23
四軸的串級(jí)pid調(diào)試,在調(diào)內(nèi)環(huán)的時(shí)候,外環(huán)pid的三個(gè)參數(shù)是怎么設(shè)置?遙控器給的控制是給在外環(huán)上,那我現(xiàn)在要調(diào)節(jié)內(nèi)環(huán)的參數(shù),是應(yīng)把外環(huán)pid的三個(gè)參數(shù)設(shè)置為0,還是什么?麻煩解答下,謝謝。
2019-08-06 03:56:06
,產(chǎn)生過(guò)沖,過(guò)大會(huì)產(chǎn)生振蕩。3、D抑制過(guò)沖和振蕩,過(guò)小系統(tǒng)會(huì)過(guò)沖,過(guò)大會(huì)減慢響應(yīng)速度。D的另外一個(gè)作用是抵抗外界的突發(fā)干擾,阻止系統(tǒng)的突變。通過(guò)這個(gè)模型和圖表,一步步演示PID參數(shù)的作用和調(diào)試方法:
2016-06-08 17:06:55
通過(guò)PID實(shí)現(xiàn)溫度控制 PID參數(shù)設(shè)定如下: 4. 畫(huà)面設(shè)定 在畫(huà)面設(shè)定溫度,當(dāng)溫度高于設(shè)定值時(shí),啟動(dòng)風(fēng)機(jī)和噴淋泵。 5. 調(diào)試遇到的問(wèn)題及解決方案 由于循環(huán)水池很大,使得溫度變化非常慢
2023-03-13 16:32:37
積分過(guò)程在工業(yè)過(guò)程控制中經(jīng)常遇到,采用常規(guī)的PID 參數(shù)整定方法很難得到理想的控制效果。本文采用基于H∞回路成形的魯棒PID 參數(shù)整定方法,實(shí)現(xiàn)對(duì)積分過(guò)程的有效控制。通過(guò)Si
2009-08-07 09:51:16 8
8 PID 控制器的穩(wěn)定范圍參數(shù)值:在工業(yè)控制上,大部分的控制器都是使用PID 控制器,而適當(dāng)?shù)恼{(diào)整PID 控制器參數(shù)遂便成極具挑戰(zhàn)的工作,但是有哪些范圍的PID數(shù)值可以使受控場(chǎng)(Plant)穩(wěn)
2009-10-31 14:31:4945 嵌入式JTAG調(diào)試方法步驟
嵌入式系統(tǒng)JTAG調(diào)試步驟1. 將PC與調(diào)試器Multi-ICE用并口連接;調(diào)試器與開(kāi)發(fā)板用14或20針的JTAG線(xiàn)連接。2. 依次打開(kāi)調(diào)試器
2010-03-01 16:24:2034 分析了變參數(shù)PID控制器各個(gè)參數(shù)隨著誤差信號(hào)的變化趨勢(shì),得到它們的關(guān)系表達(dá)式。通過(guò)這個(gè)關(guān)系式去實(shí)現(xiàn)變參數(shù)PID控制器的參數(shù)校正。仿真結(jié)果表明能得到比常規(guī)非變參數(shù)PID控制
2010-07-21 09:37:1517 實(shí)驗(yàn) PID的參數(shù)整定及參數(shù)變化對(duì)系統(tǒng)的影響綜合實(shí)驗(yàn)
一、 實(shí)驗(yàn)?zāi)康模?、 掌握PID各校正環(huán)節(jié)的作用2、 確定給
2009-05-17 10:35:5526529 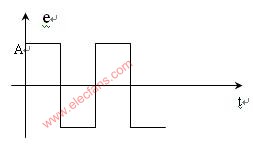
在PID參數(shù)進(jìn)行整定時(shí)如果能夠有理論的方法確定PID參數(shù)當(dāng)然是最理想的方法,但是在實(shí)際的應(yīng)用中,更多的是通過(guò)湊試法來(lái)確定PID的參數(shù)。 增大比例系數(shù)P一般將加快系統(tǒng)的響應(yīng),在有
2011-04-22 16:58:300 針對(duì) PID參數(shù)復(fù)雜繁瑣的整定過(guò)程這一問(wèn)題,提出了基于MATLAB/Simulink仿真環(huán)境,模擬工程穩(wěn)定邊界法的船載雷達(dá)伺服系統(tǒng)PID參數(shù)整定策略和步驟,并進(jìn)行了仿真實(shí)驗(yàn)。結(jié)果表明該方法具有
2013-07-25 11:32:4231 常規(guī)儀表的調(diào)試方法及步驟,好東西,喜歡的朋友可以下載來(lái)學(xué)習(xí)。
2016-01-18 15:31:050 PID參數(shù)整定方法的研究-2009,下來(lái)看看。
2016-03-31 17:01:4920 PID調(diào)節(jié)器參數(shù)的繼電自整定方法-1998
2016-03-31 17:46:3316 參數(shù)自整定PID控制器設(shè)計(jì)與仿真,下來(lái)看看
2016-03-31 17:46:3333 基于MATLABSimuIink的PID參數(shù)整定-2009
2016-03-31 17:46:3312 網(wǎng)上找的PID的控制原理及手動(dòng)調(diào)諧PID參數(shù),我覺(jué)得寫(xiě)得不錯(cuò),可以參考
2016-06-14 14:13:2621 PID參數(shù)可設(shè)單片機(jī)課程設(shè)計(jì)關(guān)于PID在單片機(jī)上的應(yīng)用與技巧
2016-07-29 15:32:434 PID教程之PID參數(shù)整定方法及其應(yīng)用研究
2016-09-01 15:01:520 PID控制最通俗的解釋與PID參數(shù)的整定方法
2017-01-04 14:47:1540 本文檔內(nèi)容介紹了調(diào)試數(shù)字硬件設(shè)計(jì)的步驟,以及框架原理圖,供網(wǎng)友參考。
2017-09-15 18:54:543 PID調(diào)節(jié)系統(tǒng)PID功能由PID調(diào)節(jié)器或DCS系統(tǒng)內(nèi)部功能程序模塊實(shí)現(xiàn),了解與PID調(diào)節(jié)相關(guān)的一些基本概念,有助于PID入門(mén)新手快速熟悉調(diào)節(jié)器應(yīng)用,在自動(dòng)調(diào)節(jié)系統(tǒng)中成功整定PID參數(shù)。
2017-09-19 15:06:409 PID算法是工程控制領(lǐng)域常用的一種算法,其有著技術(shù)成熟,不需要建立數(shù)學(xué)模型,參數(shù)整定靈活,適用性強(qiáng),魯棒性強(qiáng),控制效果好等優(yōu)點(diǎn),得到了廣泛的應(yīng)用,其參數(shù)整定對(duì)控制效果影響極大,針對(duì)增量式的PID的參數(shù)整定方法在現(xiàn)有的文獻(xiàn)中較少涉及,本文將對(duì)增量式PID參數(shù)整定進(jìn)行一定的探討。
2017-11-24 16:27:2715044 
PID控制是最早發(fā)展起來(lái)的控制策略之一,因?yàn)樗婕暗脑O(shè)計(jì)算法和控制結(jié)構(gòu)都很簡(jiǎn)單,因此,被廣泛應(yīng)用于過(guò)程控制和運(yùn)動(dòng)控制中。但在實(shí)際系統(tǒng)設(shè)計(jì)過(guò)程中,設(shè)計(jì)師經(jīng)常受到參數(shù)整定方法繁雜的困擾,PID控制器
2017-11-24 16:42:5035250 
為什么PID應(yīng)用如此廣泛、又長(zhǎng)久不衰? 因?yàn)?b class="flag-6" style="color: red">PID解決了自動(dòng)控制理論所要解決的最基本問(wèn)題,既系統(tǒng)的穩(wěn)定性、快速性和準(zhǔn)確性。調(diào)節(jié)PID的參數(shù),可實(shí)現(xiàn)在系統(tǒng)穩(wěn)定的前提下,兼顧系統(tǒng)的帶載能力和抗擾能力
2018-02-08 08:32:2715889 
PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容。它是根據(jù)被控過(guò)程的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小。PID控制器參數(shù)整定的方法很多,概括起來(lái)有兩大類(lèi)
2018-02-26 14:19:1634250 本文首先介紹了擴(kuò)聲系統(tǒng)的基本組成結(jié)構(gòu),其次介紹了影響擴(kuò)聲系統(tǒng)調(diào)試六大因素,最后介紹了擴(kuò)聲系統(tǒng)調(diào)試的詳細(xì)步驟。
2018-05-24 16:36:0310036 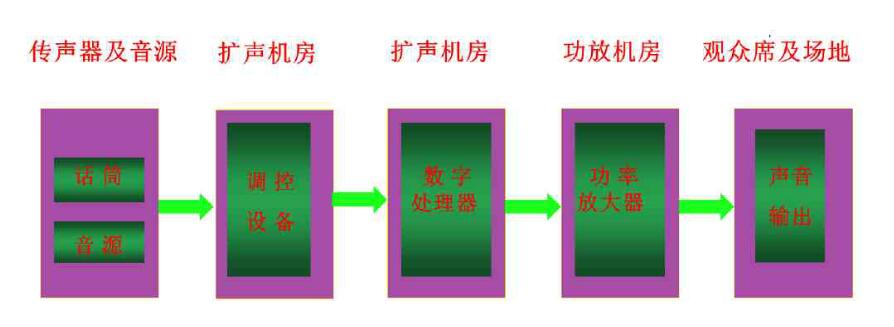
本文主要詳解現(xiàn)場(chǎng)擴(kuò)聲系統(tǒng)的調(diào)試步驟教程,首先介紹了擴(kuò)聲系統(tǒng)的基本組成及系統(tǒng)流程,其次介紹了擴(kuò)聲系統(tǒng)調(diào)試的工具,最后闡述了傳統(tǒng)的模擬系統(tǒng)調(diào)試和聲音調(diào)試的基本步驟,具體的跟隨小編一起來(lái)了解一下。
2018-05-25 16:16:556811 
PID是比例、積分、微分的簡(jiǎn)稱(chēng),PID控制的難點(diǎn)不是編程,而是控制器的參數(shù)整定。參數(shù)整定的關(guān)鍵是正確地理解各參數(shù)的物理意義,PID控制的原理可以用人對(duì)爐溫的手動(dòng)控制來(lái)理解。閱讀本文不需要高深的數(shù)學(xué)知識(shí)。
2018-05-31 08:40:4444 本文檔的主要內(nèi)容詳細(xì)介紹的是Arduino的PID自動(dòng)調(diào)試庫(kù)免費(fèi)下載。
2019-11-25 08:00:0018 PID原理和參數(shù)調(diào)試
2020-02-04 15:19:195455 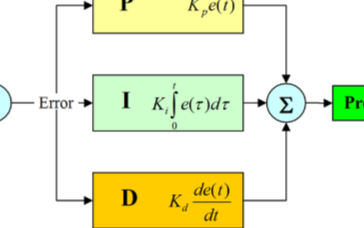
Linux:QEMU調(diào)試內(nèi)核的步驟
2020-06-23 09:03:072841 
如果調(diào)試人員熟悉被控對(duì)象,或者有類(lèi)似的控制系統(tǒng)的資料可供參考,PID控制器的初始參數(shù)是比較容易確定的。反之,控制器的初始參數(shù)的確定是相當(dāng)困難的,隨意確定的初始參數(shù)可能比最后調(diào)試好的參數(shù)相差數(shù)十倍甚至數(shù)百倍。很多書(shū)籍介紹了確定PID控制器初始參數(shù)的擴(kuò)充臨界比例度法和擴(kuò)充響應(yīng)曲線(xiàn)法。
2020-07-21 10:24:434832 PID控制中有P、I、D三個(gè)參數(shù),只有明白這三個(gè)參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達(dá)最佳控制效果。能熟練進(jìn)行PID參數(shù)整定,將自動(dòng)控制系統(tǒng)投自動(dòng),這代表著工程技術(shù)人員的自動(dòng)化技能水平,但很多人并未真正掌握PID控制和PID參數(shù)整定。
2020-08-31 09:34:524194 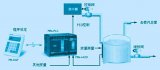
變頻器調(diào)試步驟有哪些呢?這就是本期我們要為大家講的相關(guān)問(wèn)題了,請(qǐng)看下面的具體講述吧:
2020-09-15 16:36:2816199 PID各參數(shù)對(duì)PID運(yùn)算輸出的影響。進(jìn)而分析各參數(shù)影響的曲線(xiàn)形狀。通過(guò)相關(guān)的曲線(xiàn)形狀,了解PID參數(shù)整定的方法。仔細(xì)分清各個(gè)參數(shù)的作用,和擾動(dòng)情況下的相應(yīng)曲線(xiàn),可以快速準(zhǔn)確地判斷一個(gè)自動(dòng)調(diào)節(jié)系統(tǒng)中,到底應(yīng)該設(shè)置什么樣的參數(shù)。
2021-04-07 15:29:127 PID各參數(shù)對(duì)PID運(yùn)算輸出的影響。進(jìn)而分析各參數(shù)影響的曲線(xiàn)形狀。通過(guò)相關(guān)的曲線(xiàn)形狀,了解PID參數(shù)整定的方法。仔細(xì)分清各個(gè)參數(shù)的作用,和擾動(dòng)情況下的相應(yīng)曲線(xiàn),可以快速準(zhǔn)確地判斷一個(gè)自動(dòng)調(diào)節(jié)系統(tǒng)中,到底應(yīng)該設(shè)置什么樣的參數(shù)。
2021-04-27 10:38:1447 PID算法原理_調(diào)試經(jīng)驗(yàn)以及代碼總結(jié)分享。
2021-05-25 15:59:4616 PID控制中有P、I、D三個(gè)參數(shù),只有明白這三個(gè)參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達(dá)最佳控制效果。
2021-05-27 15:38:4095 數(shù)字PID及其參數(shù)整定方法介紹。
2021-05-31 16:34:2225 作為經(jīng)典的控制理論,PID控制規(guī)律仍然是當(dāng)今工控行業(yè)的主導(dǎo)控制方式,無(wú)論復(fù)雜、簡(jiǎn)單的控制任務(wù),PID控制都能取得滿(mǎn)意的控制效果,前提是PID參數(shù)必須選擇合適。可以說(shuō),通過(guò)適當(dāng)?shù)?b class="flag-6" style="color: red">PID參數(shù),PID控制
2021-06-01 10:28:0157 PID參數(shù)整定資料免費(fèi)下載。
2021-06-01 10:36:1331 PID算法原理、調(diào)試方法及源代碼
2021-07-06 10:25:0411 ,在布線(xiàn)以前,先復(fù)位主要參數(shù)。在調(diào)試軟件上:選定伺服電機(jī)操縱方法;將PID主要參數(shù)清零;讓調(diào)試軟件通電時(shí)默認(rèn)設(shè)置使能數(shù)據(jù)信號(hào)關(guān)掉;將此情況儲(chǔ)存,保證調(diào)試軟件再度通電時(shí)即因此情況。 2.布線(xiàn),將調(diào)試軟件關(guān)閉電源,聯(lián)接調(diào)試軟件與
2021-07-11 15:20:4721595 pid控制三個(gè)參數(shù)怎么調(diào)整?
2021-09-19 09:08:0045711 PID算法原理、調(diào)試經(jīng)驗(yàn)以及代碼資料
2021-11-21 10:25:3315 系統(tǒng)調(diào)試是系統(tǒng)正式投入使用前的必要步驟。與繼電器和接觸器控制系統(tǒng)不同,plc控制系統(tǒng)有硬件調(diào)試和軟件調(diào)試。與繼電器-接觸器控制系統(tǒng)相比,PLC控制系統(tǒng)的硬件調(diào)試相對(duì)簡(jiǎn)單,主要是PLC程序的調(diào)試
2022-01-12 11:13:557940 PID控制器的參數(shù)整定是控制系統(tǒng)設(shè)計(jì)的核心內(nèi)容。它是根據(jù)被控過(guò)程的特性確定PID控制器的比例系數(shù)、積分時(shí)間和微分時(shí)間的大小。PID控制器參數(shù)整定的方法很多,概括起來(lái)有兩大類(lèi):
2022-05-26 16:34:3930841 PID控制中有P、I、D三個(gè)參數(shù),只有明白這三個(gè)參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達(dá)最佳控制效果。能熟練進(jìn)行PID參數(shù)整定,將自動(dòng)控制系統(tǒng)投自動(dòng),這代表著工程技術(shù)人員的自動(dòng)化技能水平,但很多人并未真正掌握PID控制和PID參數(shù)整定。
2022-09-27 15:27:224126 PID調(diào)節(jié)器的使用操作一般包括以下幾個(gè)步驟:
設(shè)置目標(biāo)值:確定需要控制的目標(biāo)值,例如溫度、壓力、流量等。
連接控制器:將PID控制器連接到被控對(duì)象上,例如溫度傳感器、壓力傳感器
2023-03-25 11:41:2211763 固定的壓力目標(biāo)值,使用 4~20mA管道壓力反饋儀表構(gòu)成的PID控制恒壓供水系統(tǒng)的接線(xiàn)如下圖所示:2. 調(diào)試步驟2.1工廠(chǎng)復(fù)位當(dāng)調(diào)試變頻器時(shí),建議執(zhí)行工廠(chǎng)復(fù)
2023-04-10 09:49:356 系統(tǒng)調(diào)試是系統(tǒng)正式投入使用前的必要步驟。與繼電器和接觸器控制系統(tǒng)不同,plc控制系統(tǒng)有硬件調(diào)試和軟件調(diào)試。與
繼電器-接觸器控制系統(tǒng)相比,PLC控制系統(tǒng)的硬件調(diào)試相對(duì)簡(jiǎn)單,主要是PLC程序的調(diào)試
2023-04-18 09:49:4511 在學(xué)習(xí) PID 算法的參數(shù)整定的時(shí)候,每一個(gè)系統(tǒng)的 PID系數(shù)是不通用的,在不同的系統(tǒng)中運(yùn)用同樣的 PID 系數(shù)
2023-05-04 17:57:4641267 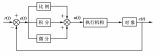
在學(xué)習(xí) PID 算法的參數(shù)整定的時(shí)候,每一個(gè)系統(tǒng)的 PID系數(shù)是不通用的,在不同的系統(tǒng)中運(yùn)用同樣的 PID系數(shù),其最終所體現(xiàn)的效果可能是相差可能甚遠(yuǎn)的,所以我們需要根據(jù)實(shí)際的系統(tǒng)進(jìn)行 PID 的參數(shù)
2023-11-14 17:12:52902 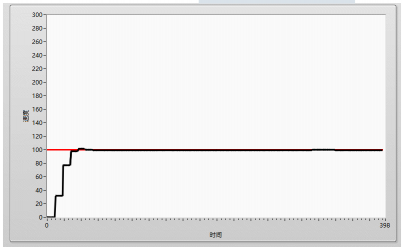
PID,就是“比例(proportional)、積分(integral)、微分(derivative)”,是一種很常見(jiàn)的控制算法。
PID已經(jīng)有107年的歷史了,它并不是什么很神圣的東西,大家一定都見(jiàn)過(guò)PID的實(shí)際應(yīng)用。
2024-03-18 11:24:5391 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論