運(yùn)動(dòng)控制起源于早期的伺服控制,本文與讀者分享的是運(yùn)動(dòng)控制的定義、運(yùn)動(dòng)控制系統(tǒng)的基本架構(gòu)組成以及在運(yùn)動(dòng)控制方面幾項(xiàng)運(yùn)動(dòng)所需控制軌跡等
2013-04-07 10:47:25 3455
3455 ,數(shù)控機(jī)床。大規(guī)模集成電路制造設(shè)備、雷達(dá)和各種軍用武器隨動(dòng)系統(tǒng),以及柔性制造系統(tǒng)(FMS)等。而運(yùn)動(dòng)控制系統(tǒng)的組成主要由五部分構(gòu)成:被移動(dòng)的機(jī)械設(shè)備、帶反饋和運(yùn)動(dòng)I/O的馬達(dá)(伺服或步進(jìn))、馬達(dá)驅(qū)動(dòng)單元、運(yùn)動(dòng)控制模塊、以及編程/操作接口軟件(見(jiàn)圖1)所示。其運(yùn)動(dòng)控制芯片或模塊是作為伺服與步進(jìn)控制用。
2020-06-26 09:27:002058 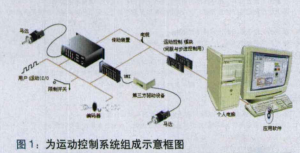
進(jìn)行運(yùn)動(dòng)。一個(gè)運(yùn)動(dòng)控制系統(tǒng)的基本架構(gòu)組成包括:一個(gè)運(yùn)動(dòng)控制器用以生成軌跡點(diǎn)(期望輸出)和閉合位置反饋環(huán)。許多控制器也可以在內(nèi)部閉合一個(gè)速度環(huán)。一個(gè)驅(qū)動(dòng)或放大器用以將來(lái)自運(yùn)動(dòng)控制器的控制信號(hào)(通常是速度或
2016-05-07 19:22:19
完整的控制系統(tǒng)是什么樣的?控制器的作用是什么?上位機(jī)做什么?單片機(jī)可以做什么?運(yùn)動(dòng)控制和電機(jī)控制的區(qū)別是什么?
2021-10-28 06:34:31
運(yùn)動(dòng)形式更簡(jiǎn)單,通常被稱(chēng)為通用運(yùn)動(dòng)控制。運(yùn)動(dòng)控制被廣泛應(yīng)用在包裝、印刷、紡織和裝配工業(yè)中。一個(gè)運(yùn)動(dòng)控制器的基本架構(gòu)組成包括:一個(gè)運(yùn)動(dòng)控制器用以生成軌跡點(diǎn)(期望輸出)和閉合位置的反饋環(huán)。許多控制器也可以
2022-03-03 15:43:50
作者:何國(guó)軍 陳維榮 劉小強(qiáng) 孫叢君運(yùn)動(dòng)控制技術(shù)是數(shù)控機(jī)床的關(guān)鍵技術(shù),其技術(shù)水平的高低將直接影響一個(gè)國(guó)家裝備制造業(yè)的發(fā)展水平。目前,多軸伺服控制器越來(lái)越多地運(yùn)用在運(yùn)動(dòng)控制系統(tǒng)中,具有較高的集成度
2019-07-31 08:15:26
運(yùn)動(dòng)控制器是運(yùn)動(dòng)控制系統(tǒng)的核心部件。目前,國(guó)內(nèi)的運(yùn)動(dòng)控制器大致可以分為3類(lèi):第1類(lèi)是以單片機(jī)等微處理器作為控制核心的運(yùn)動(dòng)控制器。這類(lèi)運(yùn)動(dòng)控制器速度較慢、精度不高、成本相對(duì)較低,只能在一些低速運(yùn)行和對(duì)軌跡要求不高的輪廓運(yùn)動(dòng)控制場(chǎng)合應(yīng)用。
2019-10-16 06:22:14
運(yùn)動(dòng)控制系統(tǒng)
2013-08-15 09:37:04
1.運(yùn)動(dòng)控制系統(tǒng)組成1)人機(jī)接口2)運(yùn)動(dòng)控制器3)驅(qū)動(dòng)器4)執(zhí)行器5)傳動(dòng)機(jī)構(gòu)6)反饋2.運(yùn)動(dòng)曲線1)梯形速度曲線梯形曲線比較簡(jiǎn)單,但是梯形尖角會(huì)導(dǎo)致加速度不連續(xù),對(duì)系統(tǒng)產(chǎn)生極大的沖擊。2)S型速度
2021-09-01 07:52:50
運(yùn)動(dòng)控制系統(tǒng)由什么組成?
2021-11-01 06:33:31
目錄前言運(yùn)動(dòng)控制系統(tǒng)的基本方程前言本篇文章主要參考資料為:電力拖動(dòng)自動(dòng)控制系統(tǒng)——運(yùn)動(dòng)控制系統(tǒng)(第五版) 阮毅 楊影 陳伯時(shí)工業(yè)運(yùn)動(dòng)控制——電機(jī)選擇,驅(qū)動(dòng)器和控制器應(yīng)用 Hakan Gurocak
2021-09-15 07:57:19
運(yùn)動(dòng)控制系統(tǒng)(陳伯時(shí))
2020-04-02 11:05:13
基于labview的運(yùn)動(dòng)控制系統(tǒng)
2013-04-05 20:18:35
各位大俠,求助呀~運(yùn)動(dòng)控制卡采用的是ni公司PCI-7350,用labview編寫(xiě)運(yùn)動(dòng)控制系統(tǒng)。以前沒(méi)有編寫(xiě)過(guò)大型的系統(tǒng),沒(méi)什么經(jīng)驗(yàn),大俠們有沒(méi)有相關(guān)的資料,特別是編寫(xiě)的相關(guān)的例子。單軸,雙軸,三軸的就行了~~~求救呀~~~{:4:}
2013-03-12 16:07:11
作者:MiTu_-_課程:運(yùn)動(dòng)控制系統(tǒng)參考書(shū)目:《自動(dòng)控制系統(tǒng)》第二版 北京郵電大學(xué)任彥碩 趙一丁運(yùn)動(dòng)控制系統(tǒng)一、課后習(xí)題二、直流調(diào)速三、變流調(diào)速四、簡(jiǎn)答一、課后習(xí)題U1 緒論自動(dòng)控制系統(tǒng)結(jié)構(gòu)七個(gè)
2021-06-30 06:56:58
0. 介紹下圖展示了一個(gè)基于Platinum Maestro的運(yùn)動(dòng)控制系統(tǒng)的軟件結(jié)構(gòu)。Note:另外兩個(gè)軟件模塊,不包括在上面的圖表中,與白金大師一起使用。這些是KPA Studio和用于TCP
2021-09-14 09:04:01
專(zhuān)用控制芯片的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)理念概括步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)化為角位移或線位移的電磁機(jī)械裝置。步進(jìn)電機(jī)的穩(wěn)定性和可靠性直接影響到工業(yè)控制領(lǐng)域的精度,特別是在點(diǎn)膠點(diǎn)焊等高精度運(yùn)動(dòng)控制系統(tǒng)中,對(duì)于步進(jìn)電機(jī)的精度和穩(wěn)定性要求更高。所以說(shuō),對(duì)于步進(jìn)電機(jī)控制
2021-09-07 08:21:11
控制的定義:控制負(fù)載的機(jī)械運(yùn)動(dòng)例子:噴墨打印機(jī)負(fù)載:墨盒目標(biāo):使墨盒在紙面上高速、高精度地來(lái)回移動(dòng)運(yùn)動(dòng)控制系統(tǒng)的任務(wù)是什么?控制被控對(duì)象(單軸/多軸)的運(yùn)動(dòng)狀態(tài)控制輸出:位移、速度、加速度控制輸入:力或轉(zhuǎn)矩運(yùn)動(dòng)控制系統(tǒng)的組成一個(gè)復(fù)雜、高速、高精度的多軸協(xié)調(diào)運(yùn)
2021-09-01 07:06:21
什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)控制系統(tǒng)的任務(wù)是什么?
2021-10-29 07:40:48
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
伺服控制系統(tǒng)組成:運(yùn)動(dòng)控制卡運(yùn)動(dòng)控制卡是一種上位控制單元,可以控制伺服電機(jī),是基于PC總線,利用高性能微處理器(如DSP)及大規(guī)模可編程器件實(shí)現(xiàn)多個(gè)伺服電機(jī)的多軸協(xié)調(diào)控制的一種高性能的步進(jìn)/伺服電機(jī)運(yùn)動(dòng)
2021-09-09 06:25:07
伺服電機(jī)的運(yùn)動(dòng)伺服是由哪幾環(huán)組成的?PID對(duì)三環(huán)控制系統(tǒng)的差值調(diào)節(jié)有何影響?
2021-09-28 06:22:32
嵌入式技術(shù)在工業(yè)控制領(lǐng)域的應(yīng)用還不太成熟,近年來(lái),工業(yè)控制對(duì)運(yùn)動(dòng)控制系統(tǒng)的要求越來(lái)越高,為了滿足新一代運(yùn)動(dòng)控制系統(tǒng)的各項(xiàng)性能要求,嵌入式運(yùn)動(dòng)控制器應(yīng)運(yùn)而生。而基于ARM運(yùn)動(dòng)控制芯片的新一代運(yùn)動(dòng)
2019-10-11 06:30:55
需要做一個(gè)基于labview 加運(yùn)動(dòng)控制卡的伺服電機(jī)運(yùn)動(dòng)控制系統(tǒng),請(qǐng)問(wèn)PCI-7831R 這塊板是運(yùn)動(dòng)控制卡嗎,可不可以用來(lái)做,百度了是什么多功能RIO,新手,不太懂求指教
2015-12-09 18:15:35
運(yùn)動(dòng)控制技術(shù)是數(shù)控機(jī)床的關(guān)鍵技術(shù),其技術(shù)水平的高低將直接影響一個(gè)國(guó)家裝備制造業(yè)的發(fā)展水平。目前,多軸伺服控制器越來(lái)越多地運(yùn)用在運(yùn)動(dòng)控制系統(tǒng)中,具有較高的集成度和靈活性,可實(shí)時(shí)完成運(yùn)動(dòng)控制過(guò)程中復(fù)雜
2019-08-06 06:27:00
在多軸伺服控制系統(tǒng)中實(shí)現(xiàn)同步精密運(yùn)動(dòng)
2021-01-27 07:45:40
如何實(shí)現(xiàn)基于STM32F103懸掛運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)?
2021-12-23 06:47:52
運(yùn)動(dòng)控制系統(tǒng)被廣泛地運(yùn)用于各個(gè)領(lǐng)域。傳統(tǒng)的運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)有基于PC的中央控制方式和基于微控制器的嵌入式控制方式等。
2019-08-28 07:00:52
控制系統(tǒng)的精確控制是非常困難的。靠改變懸掛被控對(duì)象的繩索長(zhǎng)短來(lái)控制被控對(duì)象運(yùn)動(dòng)軌跡的懸掛運(yùn)動(dòng)控制系統(tǒng),在生產(chǎn)控制等領(lǐng)域有很廣的應(yīng)用范圍,但受技術(shù)上的制約,使用也有一定限制。
2019-08-12 08:21:38
通常用什么辦法來(lái)評(píng)估一個(gè)運(yùn)動(dòng)控制系統(tǒng)的動(dòng)態(tài)響應(yīng)速度
2023-10-13 07:12:55
本文采用Verilog FPGA設(shè)計(jì)懸掛運(yùn)動(dòng)控制系統(tǒng)的控制器,通過(guò)輸入模塊傳送控制參數(shù),采用HDL語(yǔ)言編程實(shí)現(xiàn)的控制算法,驅(qū)動(dòng)步進(jìn)電機(jī),對(duì)懸掛運(yùn)動(dòng)物體進(jìn)行精確的控制。
2021-05-06 07:11:03
怎樣去搭建一個(gè)基于TwinCAT的運(yùn)動(dòng)控制系統(tǒng)?基于TwinCAT的運(yùn)動(dòng)控制系統(tǒng)應(yīng)具備哪些功能?
2021-08-24 06:27:47
模型電動(dòng)汽車(chē)系統(tǒng)是怎樣構(gòu)成的?怎樣去設(shè)計(jì)一種雙后輪驅(qū)動(dòng)電動(dòng)汽車(chē)運(yùn)動(dòng)控制系統(tǒng)?
2021-05-13 06:19:27
如何去驗(yàn)證電機(jī)的運(yùn)動(dòng)性能?怎樣去設(shè)計(jì)一種基于STM32F407ZGT6芯片控制板機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)?
2021-06-29 08:34:12
工業(yè)運(yùn)動(dòng)控制系統(tǒng)方案XM5728-IDK-V3 機(jī)器視覺(jué)&運(yùn)動(dòng)控制主板■產(chǎn)品采用核心板+底板結(jié)構(gòu),配置應(yīng)需而變■ARM核負(fù)責(zé)HMI界面+DSP核處理復(fù)雜數(shù)據(jù)計(jì)算+FPGA 高速運(yùn)動(dòng)控制■支持
2021-09-07 07:26:54
什么是激光SLAM?激光SLAM技術(shù)在機(jī)器人運(yùn)動(dòng)控制系統(tǒng)中的應(yīng)用是什么?
2021-07-30 06:37:25
最近正在研究一個(gè)六軸的機(jī)械手,目前的想法是,用LABVIEW配合動(dòng)控制卡,來(lái)做運(yùn)動(dòng)控制系統(tǒng),這一周都在自學(xué)labview,可以說(shuō)有點(diǎn)入門(mén)了,但是現(xiàn)在有個(gè)疑問(wèn),要是想實(shí)現(xiàn)運(yùn)動(dòng)控制,應(yīng)該用labview
2013-08-03 14:42:02
移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)及控制算法研究
2012-08-20 15:54:16
請(qǐng)問(wèn)基于labview的X/Y工作臺(tái)運(yùn)動(dòng)控制系統(tǒng)該怎么辦寫(xiě)?有這方面的資料嗎,求分享。
2014-12-03 10:10:31
貼片機(jī)的控制系統(tǒng)由機(jī)器主控制器、內(nèi)嵌式PC、運(yùn)動(dòng)控制卡、圖像卡和I/O接口板等組成,實(shí)現(xiàn)了坐標(biāo)和外圍I/O接口控制,保證運(yùn)動(dòng)的準(zhǔn)確性和快速響應(yīng)性。VME箱是整個(gè)控制系統(tǒng)的核心,實(shí)現(xiàn)整機(jī)數(shù)據(jù)的采集
2018-09-07 16:12:05
CRT工業(yè)運(yùn)動(dòng)控制系統(tǒng),其硬件結(jié)構(gòu)基于高性能 DSP 為控制核心、FPGA 協(xié)處理,插補(bǔ)算法、脈沖信號(hào)產(chǎn)生及直線曲線加減速控制、I/O 信號(hào)的檢測(cè)處理。DMC600M系列3~6軸運(yùn)動(dòng)控制系統(tǒng)
2022-02-26 16:26:24
本文主要介紹了基于PCI 總線的以多單片機(jī)和DSP 為控制芯片的多軸運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì),主要包括其硬件方面的設(shè)計(jì)。詳細(xì)的介紹了運(yùn)動(dòng)控制卡和接口卡的各個(gè)模塊功能電路,包
2009-06-04 09:27:52 22
22 運(yùn)動(dòng)控制系統(tǒng)的核心控制對(duì)象是軸。采用面向?qū)ο蠓椒ǎ⑤S對(duì)象的類(lèi)結(jié)構(gòu)、狀態(tài)轉(zhuǎn)移圖和數(shù)據(jù)流圖,在該模型的基礎(chǔ)上,可以進(jìn)行軸控制參數(shù)的設(shè)置,運(yùn)動(dòng)控制庫(kù)函數(shù)的規(guī)劃和
2009-06-09 11:44:2210 試驗(yàn)車(chē)運(yùn)動(dòng)控制系統(tǒng)包含S7200 PLC程控器和兩套伺服控制系統(tǒng)(一套控制車(chē)體、一套控制電纜盤(pán))。車(chē)體控制系統(tǒng)為速度控制模式,電纜盤(pán)控制系統(tǒng)為轉(zhuǎn)矩控制模式。S7200 PLC和兩套伺
2009-06-16 10:53:1917 為了滿足CNC齒輪測(cè)量中心的測(cè)量精要求,針對(duì)定點(diǎn)數(shù)字信號(hào)處理器(DSP)TMS320LF2407A的特點(diǎn),設(shè)計(jì)一種以DSP運(yùn)動(dòng)控制為核心的運(yùn)動(dòng)控制系統(tǒng)。該系統(tǒng)通過(guò)DSP內(nèi)部集成的A/D轉(zhuǎn)換模塊對(duì)傳
2010-02-11 12:23:3379 本文介紹了一個(gè)基于多軸運(yùn)動(dòng)控制卡的運(yùn)動(dòng)控制系統(tǒng)。該系統(tǒng)以工控計(jì)算機(jī)、通用操作系統(tǒng)、PCI-8134多軸運(yùn)動(dòng)控制卡及其功能庫(kù)函數(shù)為平臺(tái),采用VC++開(kāi)發(fā)的人機(jī)界面,實(shí)現(xiàn)了三軸(X,Y,Z軸
2010-02-11 14:20:3855 如何設(shè)計(jì)運(yùn)動(dòng)控制系統(tǒng)
本內(nèi)容主要包括直流調(diào)速、交流調(diào)速和隨動(dòng)系統(tǒng)三部分。直流調(diào)速部分主要介紹單閉環(huán)、雙閉環(huán)直流調(diào)速系統(tǒng)和以全控型功率器件為主的
2010-03-31 15:30:389 提出了一種基于多軸運(yùn)動(dòng)控制器的轉(zhuǎn)臺(tái)控制系統(tǒng)的組成方案.給出了轉(zhuǎn)臺(tái)的基本組成, 介紹了多軸運(yùn)動(dòng)控制卡功能及其硬軟件的開(kāi)放性。分析了控制系統(tǒng)的組成原理,詳細(xì)介紹了控制
2010-09-23 11:58:3125 運(yùn)動(dòng)控制器已經(jīng)從以單片機(jī)或微處理器作為核心的運(yùn)動(dòng)控制器和以專(zhuān)用芯片(ASIC)作為核心處理器的運(yùn)動(dòng)控制器,發(fā)展到了基于PC總線的以DSP和FPGA作為核心處理器的開(kāi)放式運(yùn)動(dòng)控
2010-10-07 15:30:3876 運(yùn)動(dòng)控制系統(tǒng)抗干擾分析
運(yùn)動(dòng)控制系統(tǒng)作為一些自動(dòng)化設(shè)備的核心部分,其可靠性和穩(wěn)定性直接影響設(shè)備的性能,而影響其可靠性和穩(wěn)定性的主要因素之一是抗干擾
2009-05-13 09:07:16646 開(kāi)發(fā)視覺(jué)導(dǎo)引運(yùn)動(dòng)系統(tǒng)概述
過(guò)去幾年里,運(yùn)動(dòng)控制系統(tǒng)已經(jīng)把機(jī)器視覺(jué)作為其關(guān)鍵部分。越來(lái)越多的工程師和科研人員認(rèn)識(shí)到當(dāng)前的機(jī)器視覺(jué)技術(shù)和運(yùn)動(dòng)控制技術(shù)相結(jié)
2010-01-04 09:03:35945 
本文對(duì)運(yùn)動(dòng)控制系統(tǒng)中的幾種上位控制單元方案-單片機(jī)系統(tǒng),專(zhuān)業(yè)運(yùn)動(dòng)控制 PLC ,PC+運(yùn)動(dòng)控制卡,專(zhuān)用控制系統(tǒng)分別加以說(shuō)明,并詳盡地論述PC+運(yùn)動(dòng)控制卡方案。
2011-07-22 16:55:4528 為了降低研發(fā)成本,減輕微控制器的壓力,提高系統(tǒng)的穩(wěn)定性和靈活性,提出了一種基于專(zhuān)用控制芯片的步進(jìn)電機(jī)運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)方案。該運(yùn)動(dòng)控制系統(tǒng)中主要采用了微控制器AT90CA
2012-05-30 15:08:3157 提出了一種基于DSP和FPGA 的通用型運(yùn)動(dòng)控制系統(tǒng)!大大降低了系統(tǒng)成本
2013-09-23 17:49:3759 提出一種基于ARM Cortex-M3為核心的運(yùn)動(dòng)控制器的新運(yùn)動(dòng)控制方案,并給出關(guān)鍵算法。控制系統(tǒng)采用ARM運(yùn)動(dòng)控制器+PC機(jī)的結(jié)構(gòu)。PC機(jī)實(shí)現(xiàn)界面功能以及部分預(yù)處理功能,運(yùn)動(dòng)控制器則完成關(guān)
2013-09-25 14:39:0496 電路拖動(dòng)自動(dòng)控制系統(tǒng)運(yùn)動(dòng)控制系統(tǒng)電路拖動(dòng)自動(dòng)控制系統(tǒng)運(yùn)動(dòng)控制系統(tǒng)
2015-11-10 11:01:444 電力拖動(dòng)自動(dòng)控制系統(tǒng)--運(yùn)動(dòng)控制系統(tǒng)第4版_思考題答案
2015-12-03 15:42:520 打造完全可重配置運(yùn)動(dòng)控制系統(tǒng) ,NI LabVIEW。
2016-03-21 16:19:310 懸掛運(yùn)動(dòng)控制系統(tǒng)資料,有興趣的同學(xué)可以下載學(xué)習(xí)
2016-04-28 11:59:1428 運(yùn)動(dòng)控制系統(tǒng)課件,對(duì)于運(yùn)動(dòng)控制系統(tǒng)這門(mén)課程,里面的課件進(jìn)行一一解剖分析,只為讓你們更好地掌握這門(mén)課程
2016-06-15 15:53:570 現(xiàn)代運(yùn)動(dòng)控制系統(tǒng)的發(fā)展概況與趨勢(shì)的綜述。
2016-06-17 16:00:445 本系統(tǒng)采用凌陽(yáng)16位單片機(jī)SPCE061A作為控制中心,由直流步進(jìn)電機(jī)、紅外收發(fā)對(duì)管、4*4鍵盤(pán)及中文液晶顯示屏構(gòu)成的懸掛運(yùn)動(dòng)控制系統(tǒng)。該系統(tǒng)能自由控制懸掛物體完成自行設(shè)定運(yùn)動(dòng)、畫(huà)圓運(yùn)動(dòng)、沿黑線運(yùn)動(dòng)等,并能正確顯示物體到達(dá)的坐標(biāo)位置。
2016-10-12 14:57:5415 運(yùn)動(dòng)控制系統(tǒng),教材,有點(diǎn)老舊,大部分都是同異步電機(jī),PDF版。
2016-11-10 11:41:200 工業(yè)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)_施文龍
2017-01-13 21:40:361 管道檢測(cè)機(jī)器人控制系統(tǒng)設(shè)計(jì)與運(yùn)動(dòng)研究_蔡輝
2017-03-19 11:30:431 風(fēng)力擺運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)_張國(guó)軍
2017-03-19 19:04:2312 在激光直寫(xiě)運(yùn)動(dòng)控制系統(tǒng)中,為克服電機(jī)轉(zhuǎn)動(dòng)的負(fù)載擾動(dòng)、氣浮導(dǎo)軌的氣膜擾動(dòng)以及驅(qū)動(dòng)系統(tǒng)的機(jī)械共振等噪聲,實(shí)現(xiàn)載物工作臺(tái)的高精度定位,本文設(shè)計(jì)了基于雙NiosII軟核的數(shù)字伺服運(yùn)動(dòng)控制系統(tǒng)。
2017-09-08 15:09:0220 設(shè)計(jì)一電機(jī)控制系統(tǒng),控制物體在傾斜(仰角100 度)的板上運(yùn)動(dòng)。在一白色底板上固定兩個(gè)滑輪,兩只電機(jī)(固定在板上)通過(guò)穿過(guò)滑輪的吊繩控制一物體在板上運(yùn)動(dòng),運(yùn)動(dòng)范圍為 80cm100cm。物體的形狀
2017-09-11 17:40:1914 DSP的運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì)
2017-10-19 14:58:4212 運(yùn)動(dòng)控制系統(tǒng)的定義 運(yùn)動(dòng)控制系統(tǒng)(Motion Control System)也可稱(chēng)作電力拖動(dòng)控制系統(tǒng)(Control Systems of Electric Drive) 運(yùn)動(dòng)控制系統(tǒng)--通過(guò)
2017-11-09 11:35:2414 了機(jī)械運(yùn)動(dòng)控制在原子力微鏡微位移運(yùn)動(dòng)控制等學(xué)科發(fā)展前沿高新技術(shù)的應(yīng)用;結(jié)合了全向足球機(jī)器人等作者科研實(shí)例,易于教學(xué)。 本書(shū)針對(duì)機(jī)械類(lèi)專(zhuān)業(yè)運(yùn)動(dòng)控制課程教學(xué)和實(shí)踐需要,重點(diǎn)介紹了機(jī)械運(yùn)動(dòng)控制系統(tǒng)的組成原理和具體應(yīng)用
2017-11-24 15:22:1756 本文首先介紹了運(yùn)動(dòng)控制器的架構(gòu)組成及優(yōu)缺點(diǎn),其次介紹了運(yùn)動(dòng)控制器的功能,最后闡述了運(yùn)動(dòng)控制器的工作原理及應(yīng)用。
2018-04-23 18:40:2235696 本文首先介紹了伺服運(yùn)動(dòng)控制系統(tǒng)主要特點(diǎn),其次介紹了伺服運(yùn)動(dòng)控制系統(tǒng)工作原理,最后從機(jī)器人移動(dòng)方式的選擇與結(jié)構(gòu)設(shè)計(jì)、移動(dòng)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)及機(jī)器人的控制系統(tǒng)設(shè)計(jì)三個(gè)方面來(lái)詳細(xì)介紹機(jī)器人伺服運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì),具體的跟隨小編一起來(lái)了解一下。
2018-06-01 14:19:3614965 運(yùn)動(dòng)控制器主要分為三類(lèi),分別是PC-Based、專(zhuān)用控制器、PLC。其中PC-Based運(yùn)動(dòng)控制器在電子、EMS等行業(yè)被廣泛應(yīng)用;專(zhuān)用控制器的代表行業(yè)是風(fēng)電、光伏、機(jī)器人、成型機(jī)械等等;PLC則在橡膠、汽車(chē)、冶金等行業(yè)備受青睞。
2018-09-03 16:16:0510176 了廣大客戶的寶貴意見(jiàn),并參考國(guó)內(nèi)外高端同類(lèi)產(chǎn)品的一些功能及優(yōu)點(diǎn),經(jīng)深圳市科瑞特自動(dòng)化全體同仁的共同努力,推出的一款功能齊全、使用方便靈活的高端運(yùn)動(dòng)控制系統(tǒng)。 1、系統(tǒng)組成 DMC630MF 系統(tǒng)主要由運(yùn)動(dòng)控制器(DMC630M)和手持盒(Leader30ST)兩個(gè)部分 組成。 DMC630M 控制器
2020-03-23 10:56:364745 采樣、處理設(shè)備; 特種數(shù)控機(jī)床; 機(jī)器視覺(jué)及自動(dòng)檢測(cè)設(shè)備; 工業(yè)機(jī)器人; 其它控制步進(jìn)電機(jī)、伺服電機(jī)的自動(dòng)化設(shè)備。 產(chǎn)品簡(jiǎn)介 DMC650M運(yùn)動(dòng)控制系統(tǒng),可支持多個(gè)(最多 254 個(gè))控制器和PC/觸摸屏組成控制網(wǎng)絡(luò),也可應(yīng)用于需要獨(dú)立運(yùn)行的場(chǎng)合。其硬件結(jié)構(gòu)基于
2020-04-09 16:45:534833 這種運(yùn)動(dòng)控制器大都采用DSP或微機(jī)芯片作為CPU,可完成運(yùn)動(dòng)規(guī)劃、高速實(shí)時(shí)插補(bǔ)、伺服濾波控制和伺服驅(qū)動(dòng),外部IO之間的標(biāo)準(zhǔn)化通用接口功能,它開(kāi)放的函數(shù)庫(kù)可提供用戶根據(jù)不同的需要,在DOS或Windows等平臺(tái)下開(kāi)發(fā)應(yīng)用軟件,組成各種控制系統(tǒng)。目前這種運(yùn)動(dòng)控制器得到了廣泛的應(yīng)用。
2020-04-23 09:13:422355 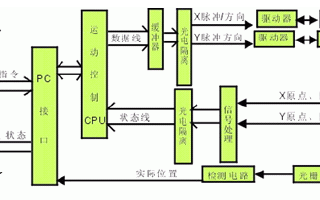
本文檔的主要內(nèi)容詳細(xì)介紹的是電力拖動(dòng)自動(dòng)控制系統(tǒng)之運(yùn)動(dòng)控制系統(tǒng)的資料簡(jiǎn)介包括了:運(yùn)動(dòng)控制系統(tǒng)及其組成,運(yùn)動(dòng)控制系統(tǒng)的歷史與發(fā)展,運(yùn)動(dòng)控制系統(tǒng)轉(zhuǎn)矩控制規(guī)律,生產(chǎn)機(jī)械的負(fù)載轉(zhuǎn)矩特性。
2020-06-11 08:00:004 基于STFT的微創(chuàng)手術(shù)機(jī)器人運(yùn)動(dòng)控制系統(tǒng)
2021-06-16 10:58:2115 基于北斗導(dǎo)航的無(wú)人艇運(yùn)動(dòng)導(dǎo)航控制系統(tǒng)
2021-06-30 15:13:1513 電力拖動(dòng)自動(dòng)控制系統(tǒng)之運(yùn)動(dòng)控制系統(tǒng)電子版
2021-07-16 10:46:180 電力拖動(dòng)自動(dòng)控制系統(tǒng)-運(yùn)動(dòng)控制系統(tǒng)-陳伯時(shí)-PDF第5版教材免費(fèi)下載。
2022-04-11 15:21:370 運(yùn)動(dòng)控制是工業(yè)自動(dòng)化系統(tǒng)的子系統(tǒng)。它同步化控制多個(gè)電機(jī)來(lái)完成一系列運(yùn)動(dòng)。例如,多軸機(jī)械臂需要多個(gè)電機(jī)無(wú)縫地協(xié)同運(yùn)行才能做出特定的動(dòng)作。運(yùn)動(dòng)控制主要用于軌跡規(guī)劃、速度規(guī)劃、插補(bǔ)算法和運(yùn)動(dòng)學(xué)轉(zhuǎn)換。運(yùn)動(dòng)控制系統(tǒng)經(jīng)常出現(xiàn)在印刷、包裝和裝配應(yīng)用中。
2022-07-22 09:52:463864 運(yùn)動(dòng)控制系統(tǒng) 其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。 運(yùn)動(dòng)的要素 抽象來(lái)講,運(yùn)動(dòng)的要素
2023-04-21 18:02:141214 運(yùn)動(dòng)控制系統(tǒng)開(kāi)發(fā)與應(yīng)用 運(yùn)動(dòng) 是以 為控制對(duì)象,以控制器為核心,以電力電子、功率變換裝置為執(zhí)行機(jī)構(gòu),在控制理論指導(dǎo)下組成的電氣傳動(dòng)控制系統(tǒng)。運(yùn)動(dòng)控制系統(tǒng)多種多樣,但從基本結(jié)構(gòu)上看,一個(gè)典型的現(xiàn)代運(yùn)動(dòng)
2023-04-21 18:04:19693 運(yùn)動(dòng)控制系統(tǒng)多種多樣,但從基本結(jié)構(gòu)上看,一個(gè)典型的現(xiàn)代運(yùn)動(dòng)控制系統(tǒng)的硬件主要由:上位機(jī)、運(yùn)動(dòng)控制器、功率驅(qū)動(dòng)裝置、電動(dòng)機(jī)、執(zhí)行機(jī)構(gòu)和傳感器反饋檢測(cè)裝置等部分組成。
2023-05-10 11:46:211048 
工控人時(shí)常會(huì)談及運(yùn)動(dòng)控制,在工業(yè)控制與自動(dòng)化領(lǐng)域中,運(yùn)動(dòng)控制到底指的是什么呢?
2023-07-24 16:30:11630 
在激光振鏡運(yùn)動(dòng)控制系統(tǒng)中不但有運(yùn)動(dòng)的控制,還有激光的控制。如何有效地處理振鏡運(yùn)動(dòng)和激光開(kāi)關(guān)的配合是本節(jié)要解決的問(wèn)題,只有有效的協(xié)調(diào)了激光和運(yùn)動(dòng)的關(guān)系,才能運(yùn)動(dòng)出精確的軌跡。
2021-09-26 11:44:591352 
運(yùn)動(dòng)控制系統(tǒng)其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。運(yùn)動(dòng)的要素抽象來(lái)講,運(yùn)動(dòng)的要素可概況
2023-10-25 08:07:52819 
運(yùn)動(dòng)控制系統(tǒng)是通過(guò)控制電機(jī)電壓、電流、頻率等輸入量,來(lái)滿足工作機(jī)械的轉(zhuǎn)矩、速度、位移等機(jī)械量,使各種工作機(jī)械按照人們期望的要求運(yùn)行,以滿足生產(chǎn)及應(yīng)用的需要。 運(yùn)動(dòng)控制系統(tǒng)由電機(jī)、功率變換裝置、控制
2023-11-14 15:54:20517 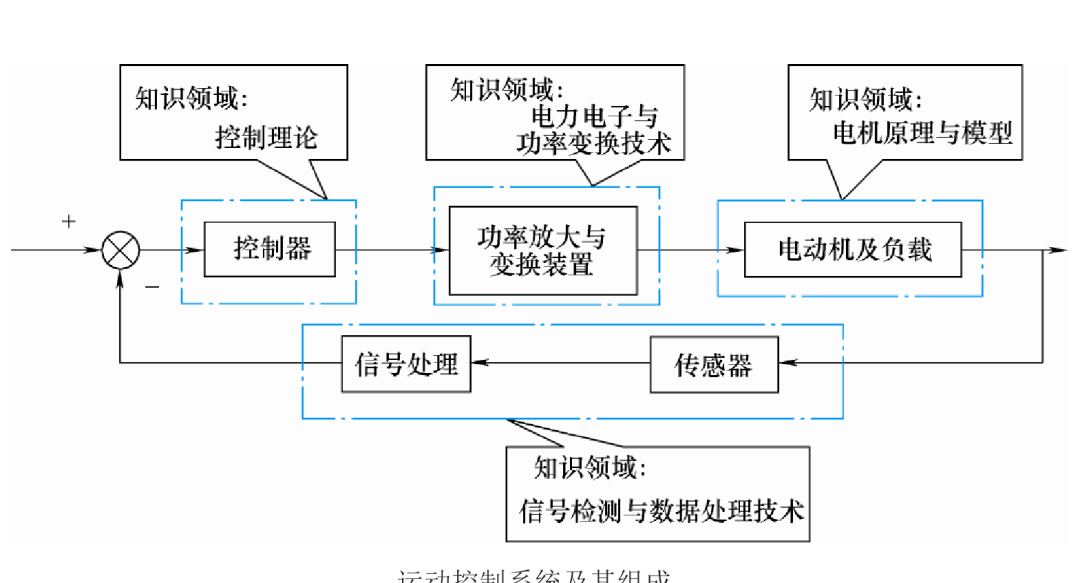
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論