 運動控制器激光振鏡控制
運動控制器激光振鏡控制
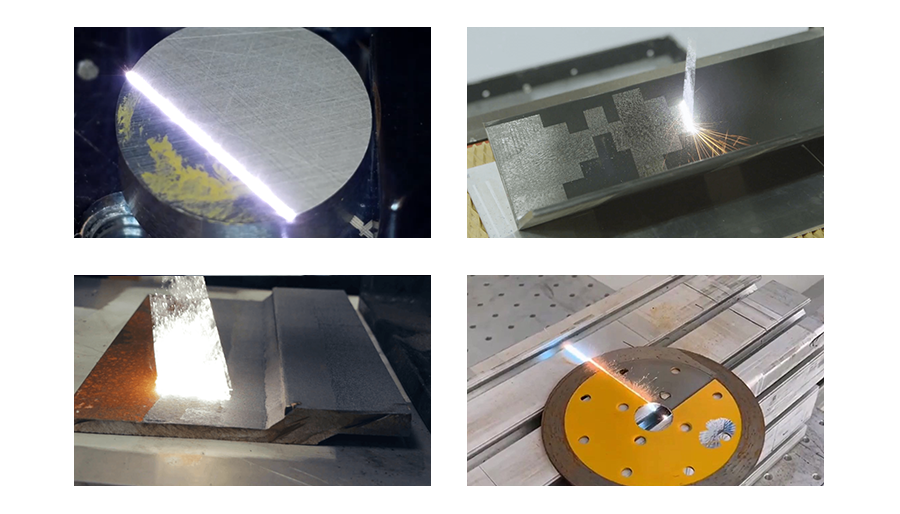
激光振鏡控制實際效果展示
激光振鏡使用ZMC420SCAN控制器控制,本節視頻主要講ZDevelop編程軟件的Basic語言開發使用。
在激光振鏡運動控制系統中不但有運動的控制,還有激光的控制。如何有效地處理振鏡運動和激光開關的配合是本節要解決的問題,只有有效的協調了激光和運動的關系,才能運動出精確的軌跡。
01 材料準備
一、硬件
1.ZMC420SCAN控制器一臺,帶振鏡軸接口。
2.激光振鏡頭一個,內含兩個振鏡軸。
3.電腦一臺。
4.帶屏蔽層網線兩根。
5.24V直流電源一個。
7.接線端子與連接線若干。
二、軟件
ZDevelop V3.10版本控制器編程軟件。
從正運動技術官網(www.zmotion.com.cn)下載壓縮包,解壓后直接運行應用程序,無需安裝。
02 硬件接線
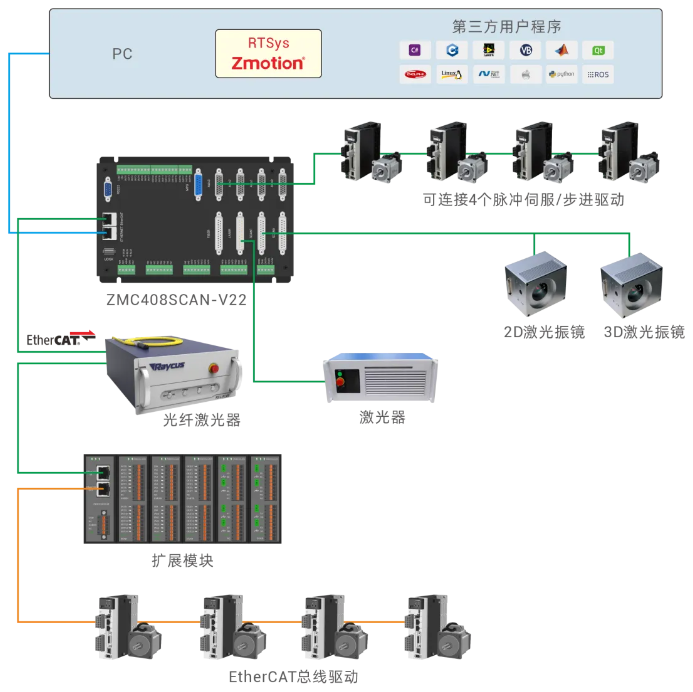
控制器接口的用途參見下圖。
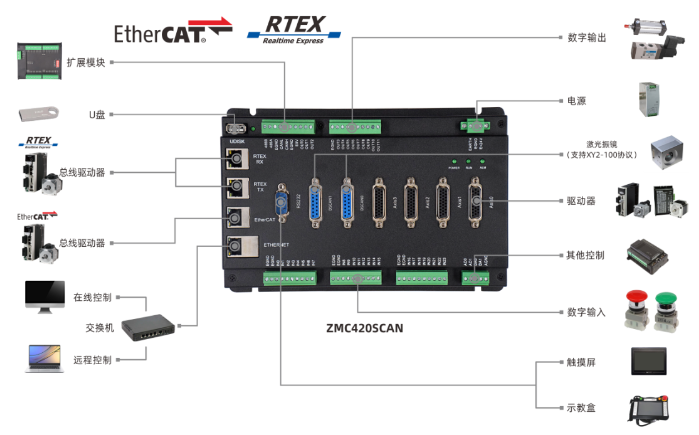
控制器接線參考
A.主電源:將控制器主電源接線端子上的E+24V端子接入24V直流電源正極,將EGND端子接入24V直流電源負極。
B.以太網EtherNET端口接線:使用一根網線將控制器的EtherNET端口與電腦的以太網口相連。
C.激光振鏡頭與控制器接線:將激光振鏡頭內的兩個振鏡軸與控制器的振鏡軸接口AXIS 4相連,此時振鏡軸軸號分別為4、5,在將激光發生器的各個接口按要求接在控制器輸出口上。
D.若打標的工件需要動作,按要求將控制工件運動的軸接入控制器的脈沖軸接口或總線軸接口上。
03 控制產品介紹
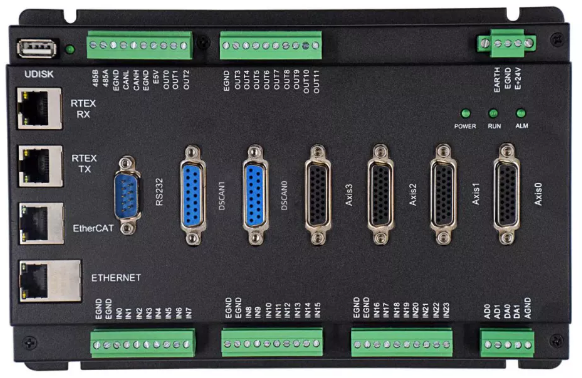
一、控制器
ZMC420SCAN是一款20軸的總線型控制器,包含兩個振鏡軸接口,除了支持脈沖軸,還支持ECAT/RTEX總線連接,支持多達20軸運動控制,支持直線插補、任意圓弧插補、空間圓弧、螺旋插補、電子凸輪、電子齒輪、同步跟隨、虛擬軸設置等;采用優化的網絡通訊協議可以實現實時的運動控制。
ZMC420SCAN總線控制器支持脈沖軸/總線軸/振鏡軸混合插補。
ZMC420SCAN支持10軸脈沖輸入與編碼器反饋且支持4振鏡軸,板載24點輸入,12點輸出,2AD,2DA,支持手輪接口,所有輸出口都支持高速PWM控制。
如下圖所示:
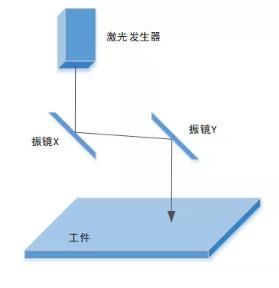
二、激光振鏡
激光振鏡是一種專門用于激光加工領域的特殊的運動器件,激光振鏡頭內包含的主要元件是激光發生器,兩個電機和兩個振鏡片,它靠兩個電機分別控制兩個振鏡片X和Y反射激光,形成XY平面的運動,這兩個電機使用控制器上的振鏡軸接口控制。
激光振鏡不同于一般的電機,激光振鏡具有非常小的慣量,且在運動的過程中負載非常小,只需要帶動反射鏡片,系統的響應非常快。
04 振鏡控制過程
一、振鏡軸控制
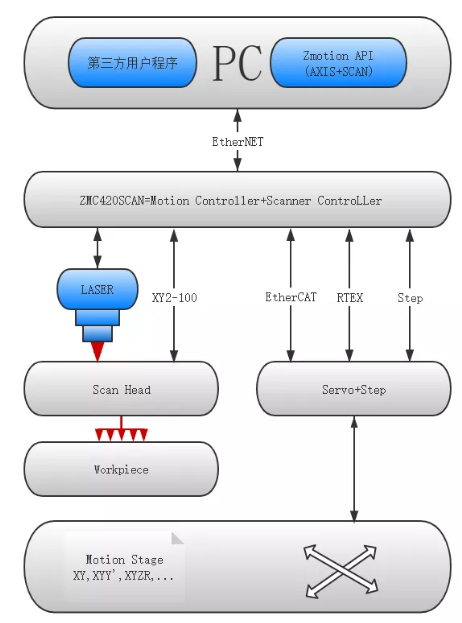
ZMC420SCAN支持XY2-100振鏡協議,支持運動控制與振鏡聯合插補運動。
上位機通過網口與控制器相連,通過XY2-100振鏡協議進行控制振鏡軸的運動,通過總線協議或者脈沖模式控制伺服軸運動。
使用ZMC420SCAN控制器的振鏡軸接口連接激光振鏡頭,每個振鏡軸接口內包含兩路振鏡通道信號,分別控制振鏡片X、Y的偏轉,從而控制了激光打到工件的位置。
激光振鏡程序開發除了使用ZDevelop軟件,還可以使用其他上位機軟件開發,ZMC420SCAN使用一套API函數,支持C、C++、C#、LabVIEW、Python、Delphi等開發語言,支持VC6.0、VB6.0、Qt、.Net等平臺,支持Windows、Linux、WinCE、iMac等操作系統。

將控制器支持PWM功能的輸出口連接激光振鏡的激光發生器,通過指令控制器激光的頻率、激光輸出,激光打標的運動控制通過運動控制指令來實現。。
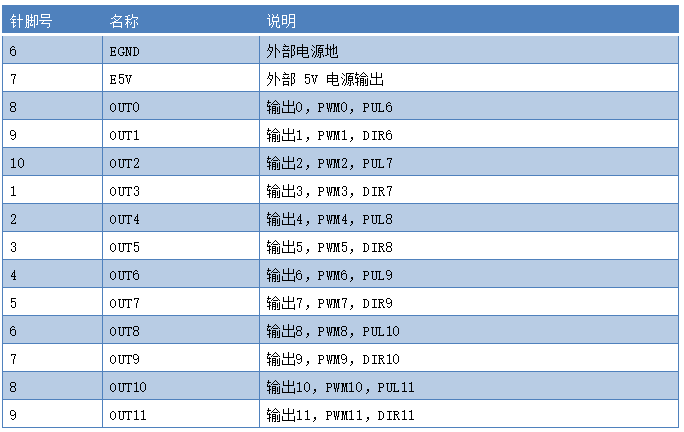
ZMC420SCAN的外部通用輸出口0-11都具有PWM輸出功能,PWM 輸出受正常輸出功能的控制,只有輸出口狀態ON的時候PWM才能實際輸出,這樣可以用來控制激光能量。
使用PWM_DUTY指令設置激光占空比,加工過程中要使激光一直處于開啟狀態將此參數設為1,設為0表示激光關閉。PWM_FREQ指令設置激光的頻率。
激光參數設置完成,在運動中使用MOVE_OP指令操作激光是否輸出。
二、激光控制指令
PWM_DUTY——PWM占空比
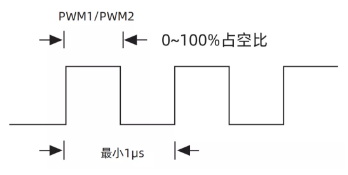
PWM的占空比用于控制激光能量輸出,PWM只能通過設置占空比為0來關閉,不能通過設置PWM頻率為0實現,PWM頻率一定要在PWM開關之前調整。
占空比指有效電平占整個周期的比例,一個周期中先輸出有效電平,再輸出無效電平。
語法一:PWM_DUTY(編號,占空比)
語法二:PWM_DUTY(編號)=占空比
選擇PWM輸出口編號時,一定要選擇支持PWM功能的OUT口;占空比范圍0-1,當設置0的時候,PWM關閉,設置為1,PWM常開。
PWM_FREQ——PWM頻率
PWM頻率設置或讀取,頻率越高,電平跳變越頻繁。
語法一:PWM_FREQ(編號, 頻率)
語法二:PWM_FREQ(編號)=頻率
PWM輸出頻率有限制,硬件PWM最大為1MHz,軟件PWM最大為2KHz。
MOVE_PWM——緩沖PWM
BASE軸運動緩沖操作PWM,指令緩沖執行時不做任何運動,只操作PWM。
PWM只能通過設置占空比為0來關閉,不能通過設置PWM頻率為0實現。
語法:MOVE_PWM(編號,占空比[,頻率])
編號為支持PWM功能的輸出口編號,查看硬件手冊確認。
占空比指有效電平占整個周期的比例;范圍0-1,設置0時關閉PWM;一個周期中先輸出有效電平,再輸出無效電平。
頻率缺省為1KHz,硬件最大為1MHz,軟件最大為2KHz。
運動緩沖中輸出并修改PWM例子:
BASE(0)
ATYPE=1
UNITS=100
SPEED=100 '初始速度
ACCEL=1000
DECEL=1000
DPOS=0
MOVE_PWM(0, 0, 1000) '關閉PWM
MOVE(10)
MOVE_PWM(0, 0.111, 2000) '軸0運行到10時,操作PWM0輸出
MOVE_DELAY(100)
MOVE_PWM(0, 0.555, 3000) '延時100ms,修改PWM0輸出
MOVE(20)
MOVE_PWM(0, 0, 1000) '關閉PWM
END
三、振鏡軸接口
ZMC420SCAN帶兩個振鏡軸接口,本地軸號4/5可以ATYPE=21 配置為第1個振鏡, 本地軸號 6/7可以ATYPE=21 配置為第2個振鏡,可通過AXIS_ADDRESS軸映射指令配置可以更改軸號。
振鏡軸接口引腳的定義:
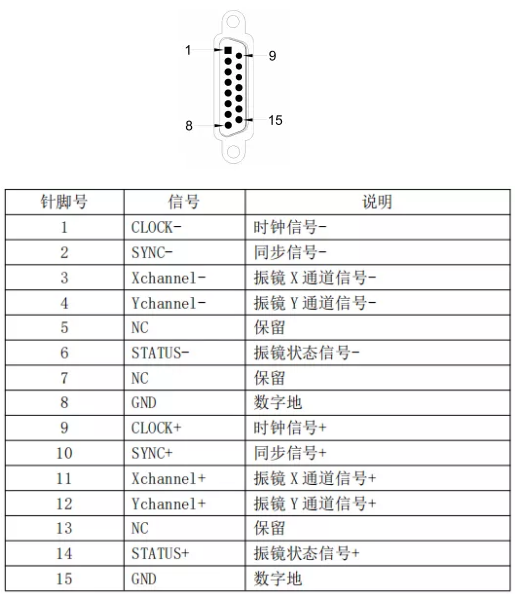
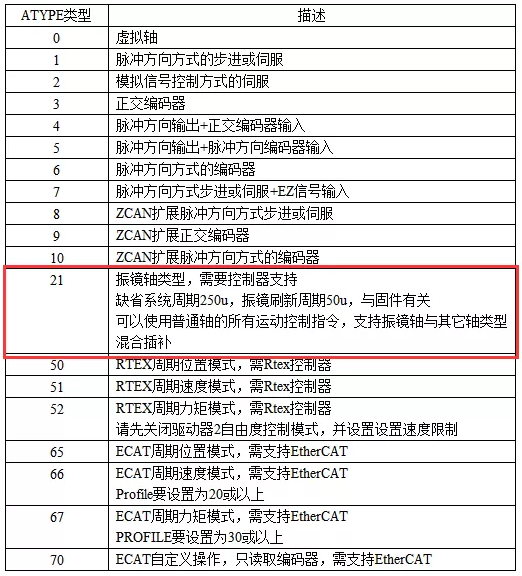
振鏡軸的軸類型應該選擇為ATYPE=21的模式,設置軸為振鏡軸類型,振鏡軸類型系統周期與刷新周期都要比普通軸快很多。
ZMC420SCAN的輸出0-7的具有精準輸出的功能,每個輸出的精準輸出功能相互獨立,同一周期可以同時開啟多個精準輸出,AXIS_ZSET指令可以用來設置每個MOVE_OP指令是否使用精準輸出,MOVEOP_DELAY指令設置精準輸出的延時,從而實現激光的PSO控制。
AXIS_ZSET——開啟精準輸出
對軸啟用MOVE_OP精準輸出功能,一條指令開啟一個軸,作用在軸組的主軸上。精準輸出需要開啟的OP口支持精準輸出功能才能生效。
設置參數:
bit0:1-VP_SPEED缺省使用插補速度,0-VP_SPEED 使用單軸的速度
bit1:1-使用MOVE_OP精確輸出功能, 0- MOVE_OP為普通輸出
bit4:1-對帶編碼器功能的軸,使用編碼器位置的MOVE_OP精準方式,多個編碼器軸插補時,對BASE運動的主軸開啟精準輸出設置
可讀:VALUE=AXIS_ZSET
可寫:AXIS_ZSET=VALUE
SYSTEM_ZSET指令也可用于開啟精準輸出,參數設置與AXIS_ZSET指令相同,SYSTEM_ZSET修改的同時會修改當前BASE軸的AXIS_ZSET,以兼容舊的程序,一般建議使用AXIS_ZSET指令。
SYSTEM_ZSET一旦開啟,所有支持精準輸出功能的輸出口都變為精準模式,使用過程中一般不需要全部開啟,部分控制器型號精準輸出功能不獨立時在一個控制器周期內只能操作一個精準輸出口,新版本固件不建議使用此指令,直接采用AXIS_ZSET指令對主軸開啟精準輸出。
精準輸出開啟方法:
AXIS_ZSET(0)=19 '使用主軸軸0編碼器位置MPOS的MOVE_OP精準方式,需要帶編碼器
AXIS_ZSET(0)=2 '不帶編碼器,用目標位置DPOS的MOVE_OP精準方式
MOVE_OP(0,1) '精準生效,選擇輸出通道0
05 激光振鏡
打標例程
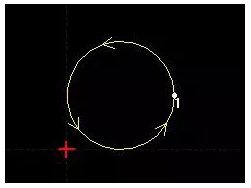
例程演示的是使用激光加工25個圓弧,軸在移動到指定位置后,開啟OP口,控制激光輸出,打標軌跡完成后,關閉OP口,此時激光也無法輸出了,軸走到下一個要打標的位置后后再次開啟OP口打標。
圓弧打標方向如下圖:軌跡可用一條圓弧插補指令實現或多條直線插補指令走小線段,此處軌跡為半徑為2.5的逆時針整圓。
示例程序:
'設置振鏡軸軸號,并配置軸類型
BASE(4,5)
ATYPE=21,21
'設置基本參數
UNITS=300,300
SPEED=500,500
ACCEL=SPEED*20,SPEED*20
DECEL=SPEED*20,SPEED*20
DPOS=0,0
MERGE=ON '打開連續插補
CORNER_MODE=32+8+2 '軌跡前瞻模式
DECEL_ANGLE=15*(PI/180) '模式2參考角度
STOP_ANGLE=90*(PI/180)
FORCE_SPEED=5000 '限速參考速度
FULL_SP_RADIUS=20 '模式8小圓限速參考半徑
ZSMOOTH=0.1 '模式32倒角參靠半徑
AXIS_ZSET(4)=2'開啟主軸MOVE_OP的精準輸出功能
'設置pwm頻率,設為2kHz
PWM_FREQ(2)=2000 'OP(2)接激光器上的輸出口
'輸出延時設置
MOVEOP_DELAY AXIS(4)=0
WHILE 1
IF MODBUS_BIT(0)=ON THEN
MODBUS_BIT(0)=OFF
BASE(4,5) '選擇振鏡軸
PWM_DUTY(11)=0.5 '能量調節,需要OUT11支持PWWM才能設置,否則選擇其他支持PWWM通道
OP(11,ON) '能量開關
OP(1,ON) '先開啟后,再操作OP(0)出光
DELAY 100
MOVE_MARK=0,0 '運動標號清零
TRIGGER
'打標進行固定軌跡
FOR I = 0 TO 4 '五行圓弧軌跡
MOVE(0, -15) '每行圓弧間隔15
FOR J = 0 TO 4 '每行五個圓弧
MOVE(-15, 0) '每個圓弧間隔15
MOVE_OP(0,ON) '開啟激光
MOVECIRC(0,0,-2.5,0,0) '打標軌跡
WAIT IDLE
MOVE_OP(0,OFF) '關閉激光
NEXT
MOVE(75, 0)
NEXT
MOVE(0, 75)
ENDIF
WEND
END
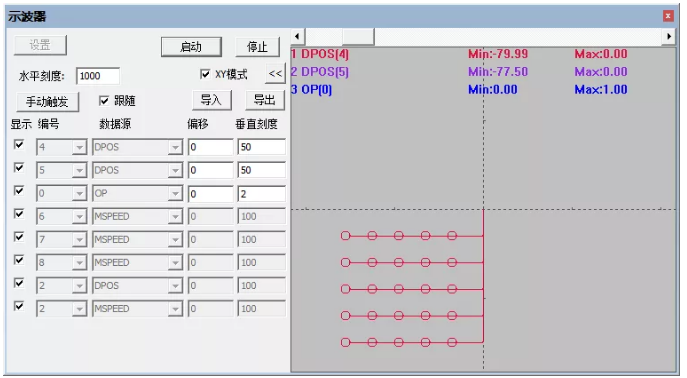
運動軌跡:
《運動控制器激光振鏡控制》就講到這里。更多學習視頻及圖文詳解請關注我們的公眾號“正運動小助手”。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
-
激光
+關注
關注
19文章
3223瀏覽量
64597 -
運動控制器
+關注
關注
2文章
406瀏覽量
24759
發布評論請先 登錄
相關推薦

激光振鏡運動控制器在智能鏡激光打砂機應用





什么是網絡運動控制器?運動控制器控制伺服電機的方式有哪些?






 工商網監
工商網監
評論