 電子發(fā)燒友App
電子發(fā)燒友App


這種地圖看起來(lái)和人們所認(rèn)知的地圖沒(méi)什么區(qū)別,它最早由NASA的Alberto Elfes在1989年提出,在火星探測(cè)車(chē)上就用到過(guò),其本質(zhì)是一張位圖圖片,但其中每個(gè)“像素”則表示了實(shí)際環(huán)境中存在障礙物的概率分布。
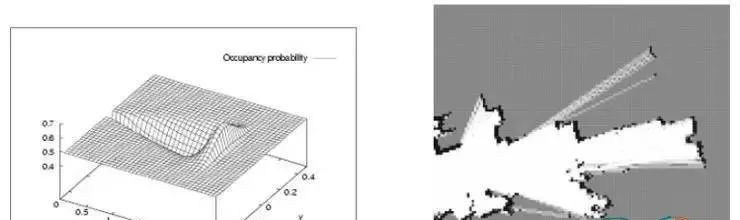
一般來(lái)說(shuō),采用激光雷達(dá)、深度攝像頭、超聲波傳感器等可以直接測(cè)量距離數(shù)據(jù)的傳感器進(jìn)行SLAM時(shí),可以使用該地圖。這種地圖也可以通過(guò)距離測(cè)量傳感器、超聲波(早期)、激光雷達(dá)(現(xiàn)在)繪制出來(lái)。
2.特征點(diǎn)地圖
特征點(diǎn)地圖,是用有關(guān)的幾何特征(如點(diǎn)、直線、面)表示環(huán)境,常見(jiàn)于vSLAM(視覺(jué)SLAM)技術(shù)中。
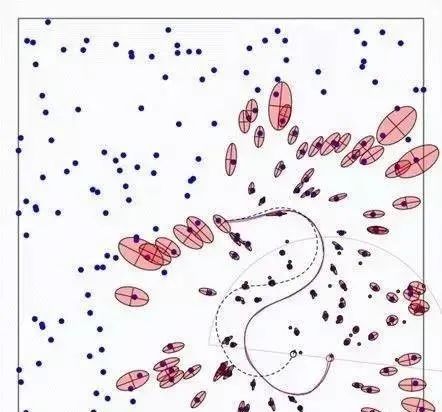
相比柵格地圖,這種地圖看起來(lái)就不那么直觀了。它一般通過(guò)如GPS、UWB以及攝像頭配合稀疏方式的vSLAM算法產(chǎn)生,優(yōu)點(diǎn)是相對(duì)數(shù)據(jù)存儲(chǔ)量和運(yùn)算量比較小,多見(jiàn)于最早的SLAM算法中。
3.直接表征法
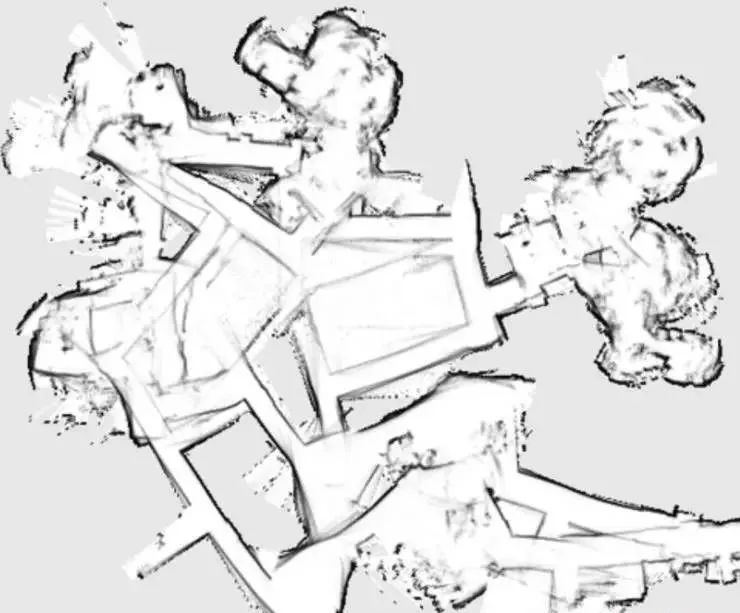
直接表征法中,省去了特征或柵格表示這一中間環(huán)節(jié),直接用傳感器讀取的數(shù)據(jù)來(lái)構(gòu)造機(jī)器人的位姿空間。
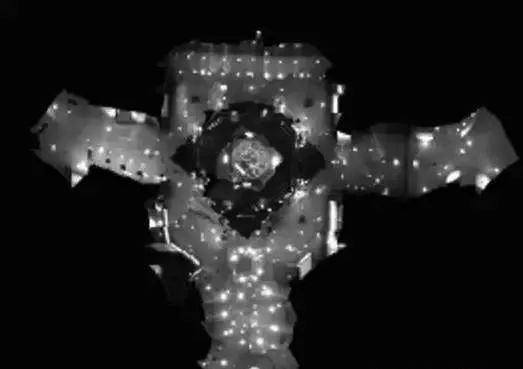
上圖就是直接記錄了屋子內(nèi)天花板畫(huà)面的圖像地圖。這種方法就像衛(wèi)星地圖一樣,直接將傳感器原始數(shù)據(jù)通過(guò)簡(jiǎn)單處理拼接形成地圖,相對(duì)來(lái)說(shuō)更加直觀。
4.拓?fù)涞貓D
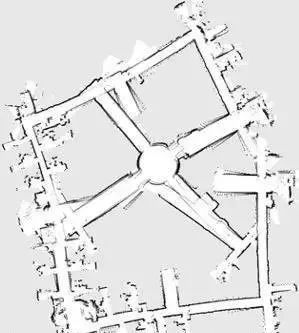
拓?fù)涞貓D,是一種相對(duì)更加抽象的地圖形式,它把室內(nèi)環(huán)境表示為帶結(jié)點(diǎn)和相關(guān)連接線的拓?fù)浣Y(jié)構(gòu)圖,其中結(jié)點(diǎn)表示環(huán)境中的重要位置點(diǎn)(拐角、門(mén)、電梯、樓梯等),邊表示結(jié)點(diǎn)間的連接關(guān)系,如走廊等。
這種方法只記錄所在環(huán)境拓?fù)滏溄雨P(guān)系,這類(lèi)地圖一般是由前幾類(lèi)地圖通過(guò)相關(guān)算法提取得到。
比如掃地機(jī)器人要進(jìn)行房間清掃的時(shí)候,就會(huì)建立這樣的拓?fù)涞貓D:
5.小結(jié)
在機(jī)器人技術(shù)中,SLAM的地圖構(gòu)建通常指的是建立與環(huán)境幾何一致的地圖。
一般算法中建立的拓?fù)涞貓D只反映了環(huán)境中的各點(diǎn)連接關(guān)系,并不能構(gòu)建幾何一致的地圖,因此,這些拓?fù)渌惴ú荒鼙挥糜赟LAM。
直接表征法類(lèi)似衛(wèi)星地圖,它是直接使用傳感器(一般是圖像傳感器)構(gòu)建得到。這種方法的信息冗余度最大,對(duì)于數(shù)據(jù)存儲(chǔ)是很大的挑戰(zhàn),同時(shí),機(jī)器人要從中提取出有用的數(shù)據(jù)也要耗費(fèi)一番周折,因此在實(shí)際應(yīng)用中很少使用。
特征點(diǎn)地圖又是另一個(gè)極端,雖然數(shù)據(jù)量少,但是它往往不能反應(yīng)所在環(huán)境的一些必須的信息,比如環(huán)境中障礙物的位置。vSLAM技術(shù)中,多采用這種地圖來(lái)解決機(jī)器人定位問(wèn)題。想讓機(jī)器人進(jìn)行自主避障和路徑規(guī)劃,還需要額外配置距離傳感器,如激光雷達(dá)、超聲波來(lái)完成。
柵格地圖,或者Occupancy Map(占據(jù)地圖)恰好介于其中,一方面它能表示空間環(huán)境中的很多特征,機(jī)器人可以用它來(lái)進(jìn)行路徑規(guī)劃,另一方面,它又不直接記錄傳感器的原始數(shù)據(jù),相對(duì)實(shí)現(xiàn)了空間和時(shí)間消耗的最優(yōu)。因此,柵格地圖是目前機(jī)器人所廣泛應(yīng)用的地圖存儲(chǔ)方式。

二、定位及傳感器選擇
當(dāng)你打開(kāi)手機(jī)中的導(dǎo)航軟件,在選擇前往目的地的最佳路線之前,首先要做的動(dòng)作是什么呢?沒(méi)錯(cuò),就是定位。我們要先知道自己在地圖中的位置,才可以進(jìn)行后續(xù)的路徑規(guī)劃。
在機(jī)器人實(shí)時(shí)定位問(wèn)題中,由于通過(guò)機(jī)器人運(yùn)動(dòng)估計(jì)得到的機(jī)器人位置信息通常具有較大的誤差,我們還需要使用測(cè)距單元得到的周?chē)h(huán)境信息更正機(jī)器人的位置。
目前,常見(jiàn)的測(cè)距單元包括激光測(cè)距、超聲波測(cè)距以及圖像測(cè)距三種。其中,憑借激光良好的指向性和高度聚焦性,激光雷達(dá)已經(jīng)成為移動(dòng)機(jī)器人的核心傳感器,同時(shí)它也是目前最可靠、最穩(wěn)定的定位技術(shù)。
自1988年被提出以來(lái),SLAM的理論研究發(fā)展十分迅速。在實(shí)際應(yīng)用時(shí),除配備激光雷達(dá)外,還需要機(jī)器人具有IMU(慣性測(cè)量單元)、里程計(jì)來(lái)為激光雷達(dá)提供輔助數(shù)據(jù),這一過(guò)程的運(yùn)算消耗是巨大的,傳統(tǒng)上需要PC級(jí)別的處理器,這也成為限制SLAM廣泛應(yīng)用的瓶頸之一。
三、傳感器數(shù)據(jù)預(yù)處理
這是一個(gè)完整的SLAM和導(dǎo)航系統(tǒng)的主要架構(gòu)圖:
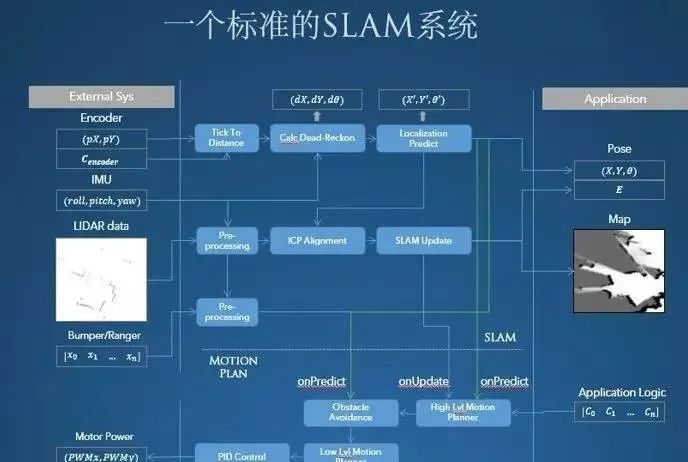
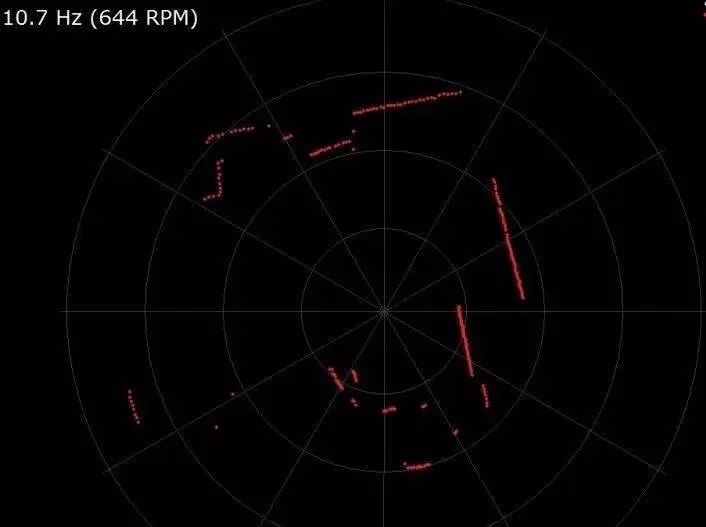
其中,SLAM核心過(guò)程包括3個(gè)步驟,第一步稱(chēng)為預(yù)處理。我們知道,激光雷達(dá)和其他雷達(dá)設(shè)備一樣,某一個(gè)時(shí)刻只能獲取它所在位置的環(huán)境信息。
這就是我們所說(shuō)的點(diǎn)云,它只能反映機(jī)器人所在環(huán)境中的一個(gè)部分。第一步預(yù)處理就是對(duì)激光雷達(dá)原始數(shù)據(jù)進(jìn)行優(yōu)化,剔除一些有問(wèn)題的數(shù)據(jù),或者進(jìn)行濾波。
四、匹配
第二步是匹配,也就是說(shuō)把當(dāng)前這一個(gè)局部環(huán)境的點(diǎn)云數(shù)據(jù)在已經(jīng)建立地圖上尋找到對(duì)應(yīng)的位置,這個(gè)步驟非常關(guān)鍵。
這個(gè)是ICP的點(diǎn)云匹配算法,用于實(shí)現(xiàn)匹配。說(shuō)這個(gè)過(guò)程關(guān)鍵,就是因?yàn)樗暮脡模苯佑绊懥薙LAM構(gòu)建地圖的精度。這個(gè)過(guò)程和我們玩拼圖游戲有點(diǎn)類(lèi)似,就是在已經(jīng)拼好的畫(huà)面中找到相似之處,確定新的一個(gè)拼圖該放在哪里。
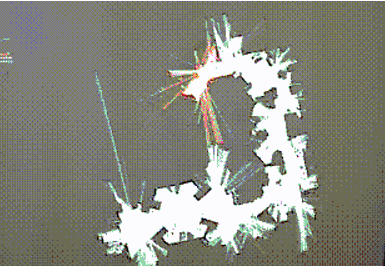
在SLAM過(guò)程中,需要將激光雷達(dá)當(dāng)前采集的點(diǎn)云(紅色部分)匹配拼接到原有地圖中。
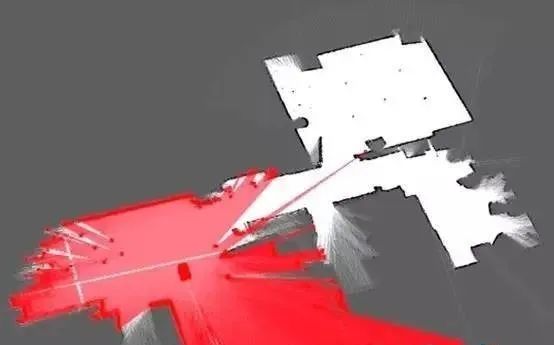
如果不進(jìn)行匹配過(guò)程,所構(gòu)建的地圖可能就亂成一團(tuán),變成這樣。
五、地圖融合
在這個(gè)部分完畢以后,就進(jìn)行第三步,地圖融合,也就是將這一輪來(lái)自激光雷達(dá)的新數(shù)據(jù)拼接到原始地圖當(dāng)中,最終完成地圖的更新。
就像這個(gè)圖一樣,這個(gè)過(guò)程是永遠(yuǎn)伴隨SLAM過(guò)程的。
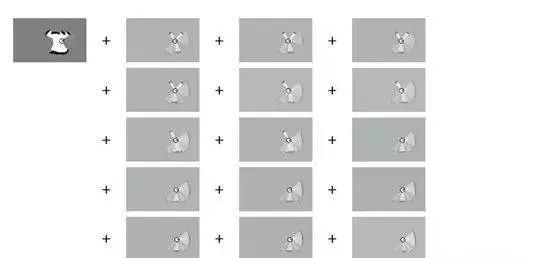
數(shù)據(jù)融合和簡(jiǎn)單的貼圖是有很大的差異的。因?yàn)閷?shí)際上傳感器描繪的世界存在一定的誤差,或者正巧在這個(gè)時(shí)間環(huán)境有了變化,例如機(jī)器人旁邊闖入了一只小貓。
因此,實(shí)際要進(jìn)行的過(guò)程會(huì)更加復(fù)雜,需要用很多概率算法,并采用濾波的方式進(jìn)行融合。將上述這個(gè)過(guò)程逐次執(zhí)行,就最終產(chǎn)生了我們看到的柵格地圖。
六、Loop Closure(回環(huán))問(wèn)題
這個(gè)過(guò)程聽(tīng)起來(lái)其實(shí)并不復(fù)雜,但是要處理好有很大難度。這里舉幾個(gè)例子,比如叫做Loop Closure(回環(huán))問(wèn)題。
如果匹配算法不足夠優(yōu)秀,或者環(huán)境中存在很不巧的干擾,當(dāng)機(jī)器人繞著環(huán)境一圈后,就會(huì)發(fā)現(xiàn)原本是應(yīng)該閉合的一個(gè)環(huán)形走廊斷開(kāi)了。
比如正常地圖應(yīng)該這樣:
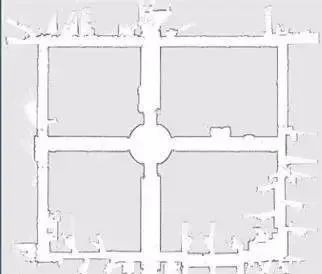
如果處理不好,實(shí)際地圖就成這樣:
對(duì)于環(huán)境比較大的場(chǎng)景,回環(huán)問(wèn)題是不得不面對(duì)的,但現(xiàn)實(shí)總是不完美的,即使是激光雷達(dá)這種高精度傳感器,也難免存在誤差。
而回環(huán)問(wèn)題的難點(diǎn)恰恰在于在一開(kāi)始出現(xiàn)少許誤差的時(shí)候,并不會(huì)被發(fā)覺(jué),直到機(jī)器人繞著環(huán)路一圈,隨著誤差的累加,發(fā)現(xiàn)環(huán)路已經(jīng)無(wú)法閉合時(shí),此時(shí)已經(jīng)釀成大錯(cuò),一般很難回天。
當(dāng)然這個(gè)問(wèn)題并不是無(wú)解,一個(gè)好的商用化SLAM系統(tǒng),回環(huán)問(wèn)題是否能很好的解決,就成為評(píng)判這個(gè)系統(tǒng)實(shí)力的指標(biāo)了。

除了算法層面的回環(huán)問(wèn)題,SLAM實(shí)際應(yīng)用中還有很多這種坑,比如走廊問(wèn)題與外界干擾問(wèn)題。
以外界干擾問(wèn)題來(lái)說(shuō),通常,激光雷達(dá)作為機(jī)器人的眼睛,一般是安裝在底盤(pán)上的,它能看到的視野很有限。當(dāng)受到外界干擾(人類(lèi)或者寵物等等)后,機(jī)器人很容易丟失定位精度,無(wú)法正常完成后續(xù)的建圖工作。
當(dāng)機(jī)器人安裝SLAMWARE后,機(jī)器人受到干擾,可以完全不受影響,照樣能夠正常工作。
目前,SLAM的開(kāi)源實(shí)現(xiàn)代表多為學(xué)術(shù)界,實(shí)際應(yīng)用有很多Corner Case要處理,需要傳感器、系統(tǒng)參數(shù)、其他輔助設(shè)備的聯(lián)合調(diào)優(yōu)。
一般來(lái)說(shuō),上述的SLAM過(guò)程對(duì)于運(yùn)算消耗是巨大的,雖然并沒(méi)有達(dá)到像訓(xùn)練神經(jīng)網(wǎng)絡(luò)動(dòng)用服務(wù)器集群那種地步,但傳統(tǒng)上需要PC級(jí)別的處理器。
除配備激光雷達(dá)外,還需要機(jī)器人具有IMU(慣性測(cè)量單元)、里程計(jì)來(lái)為激光雷達(dá)提供輔助數(shù)據(jù),否則SLAM系統(tǒng)也難以得到運(yùn)行。總的來(lái)說(shuō),SLAM算法本身是一個(gè)對(duì)于外部系統(tǒng)有著多種依賴(lài)的算法,這是一個(gè)切實(shí)的工程問(wèn)題。
七、算法優(yōu)化及商用
很多機(jī)器人,比如掃地機(jī)是不可能裝一個(gè)PC進(jìn)去的,為了讓SLAM能在這類(lèi)設(shè)備里運(yùn)行,除了解決激光雷達(dá)成本外,還要對(duì)SLAM算法做出很好的優(yōu)化。
八、路徑規(guī)劃
那么,機(jī)器人利用SLAM技術(shù)得到了有效的空間信息后,它是怎樣實(shí)現(xiàn)路徑規(guī)劃的?SLAM和路徑規(guī)劃之間關(guān)系是怎樣的?
實(shí)際上,SLAM算法本身只是完成了機(jī)器人的定位和地圖構(gòu)建兩件事情,與我們說(shuō)的導(dǎo)航定位并不是完全等價(jià)的。這里的導(dǎo)航,其實(shí)是SLAM算法做不了的。它在業(yè)內(nèi)叫做運(yùn)動(dòng)規(guī)劃(Motion Planning)。
運(yùn)動(dòng)規(guī)劃是一個(gè)很大的概念,從機(jī)械臂的運(yùn)動(dòng)、到飛行器的飛行,再到這里我們說(shuō)的掃地機(jī)的清掃路徑規(guī)劃,都是運(yùn)動(dòng)規(guī)劃的范疇。
我們先談?wù)勧槍?duì)掃地機(jī)這類(lèi)輪式機(jī)器人的運(yùn)動(dòng)規(guī)劃。這里所需的基礎(chǔ)能力就是路徑規(guī)劃,也就是一般在完成SLAM后,要進(jìn)行一個(gè)叫做目標(biāo)點(diǎn)導(dǎo)航的能力。通俗的說(shuō),就是規(guī)劃一條從A點(diǎn)到B點(diǎn)的路徑出來(lái),然后讓機(jī)器人移動(dòng)過(guò)去。
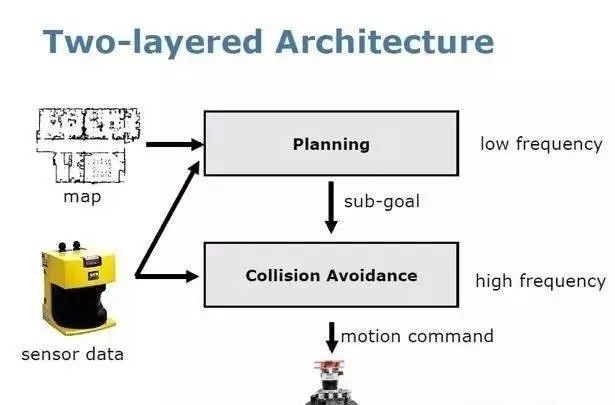
1.全局規(guī)劃
要實(shí)現(xiàn)這個(gè)過(guò)程,運(yùn)動(dòng)規(guī)劃要實(shí)現(xiàn)至少兩個(gè)層次的模塊,一個(gè)叫做全局規(guī)劃,這個(gè)和我們車(chē)載導(dǎo)航儀有一點(diǎn)像,它需要在地圖上預(yù)先規(guī)劃一條線路,也要有當(dāng)前機(jī)器人的位置。這是由我們的SLAM系統(tǒng)提供出來(lái)的。
行業(yè)內(nèi)一般會(huì)用叫做A*的算法來(lái)實(shí)現(xiàn)這個(gè)過(guò)程,它是一種啟發(fā)式的搜索算法,非常優(yōu)秀。
它最多的應(yīng)用,是在游戲中,比如像星際爭(zhēng)霸、魔獸爭(zhēng)霸之類(lèi)的即時(shí)戰(zhàn)略游戲,都是使用這個(gè)算法來(lái)計(jì)算單位的運(yùn)動(dòng)軌跡的。
2.局部規(guī)劃
當(dāng)然,僅僅規(guī)劃了路徑還是不夠的,現(xiàn)實(shí)中會(huì)有很多突發(fā)情況,比如正巧有個(gè)小孩子擋道了,就需要調(diào)整原先的路徑。
當(dāng)然,有時(shí)候這種調(diào)整并不需要重新計(jì)算一遍全局路徑,機(jī)器人可能稍微繞一個(gè)彎就可以。此時(shí),我們就需要另一個(gè)層次的規(guī)劃模塊,叫做局部規(guī)劃。
它可能并不知道機(jī)器人最終要去哪,但是對(duì)于機(jī)器人怎么繞開(kāi)眼前的障礙物特別在行。
3.已知地圖(A*)與未知地圖(D*)算法
這兩個(gè)層次的規(guī)劃模塊協(xié)同工作,機(jī)器人就可以很好的實(shí)現(xiàn)從A點(diǎn)到B點(diǎn)的行動(dòng)了,不過(guò)實(shí)際工作環(huán)境下,上述配置還不夠。
比如A*算法規(guī)劃的路徑是根據(jù)已知地圖,預(yù)先規(guī)劃好的,一旦機(jī)器人前往目的地的過(guò)程中遇到了新的障礙物,就只好完全停下來(lái),等待障礙物離開(kāi)或者重新規(guī)劃路徑了。如果掃地機(jī)器人買(mǎi)回家,必須先把屋子都走一遍以后才肯掃地,那用戶(hù)體驗(yàn)就會(huì)很差。
為此,也會(huì)有針對(duì)這類(lèi)算法的改進(jìn),比如SLAMWARE內(nèi)我們采用改良的D*算法進(jìn)行路徑規(guī)劃,這也是美國(guó)火星探測(cè)器采用的核心尋路算法。這是一種動(dòng)態(tài)啟發(fā)式路徑搜索算法,它讓機(jī)器人在陌生環(huán)境中行動(dòng)自如,在瞬息萬(wàn)變的環(huán)境中游刃有余。
D*算法的最大優(yōu)點(diǎn)是不需要預(yù)先探明地圖,機(jī)器人可以和人一樣,即使在未知環(huán)境中,也可以展開(kāi)行動(dòng),隨著機(jī)器人不斷探索,路徑也會(huì)時(shí)刻調(diào)整。
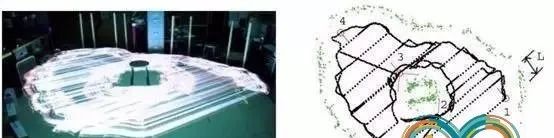
4.空間覆蓋(space coverage)
以上是目前大部分移動(dòng)機(jī)器人都需要的路徑規(guī)劃算法,而掃地機(jī)器人作為最早出現(xiàn)在消費(fèi)市場(chǎng)的服務(wù)機(jī)器人之一,它需要的路徑規(guī)劃算法更為復(fù)雜。
一般來(lái)說(shuō),掃地機(jī)需要這么幾個(gè)規(guī)劃能力:貼邊打掃、折返的工字形清掃以及沒(méi)電時(shí)候自主充電。單單依靠前面介紹的D*這類(lèi)算法,無(wú)法滿足這些基礎(chǔ)需要。
掃地機(jī)器人還需要有額外的規(guī)劃算法,比如針對(duì)折返的工字形清掃,有很多問(wèn)題要處理。掃地機(jī)如何最有效進(jìn)行清掃而不重復(fù)清掃?如何讓掃地機(jī)和人一樣,理解房間、門(mén)、走廊這種概念?
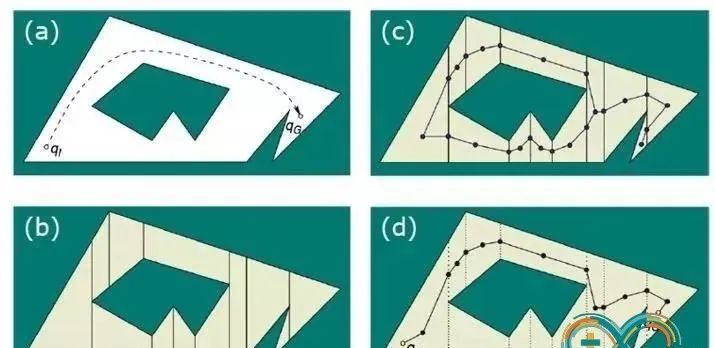
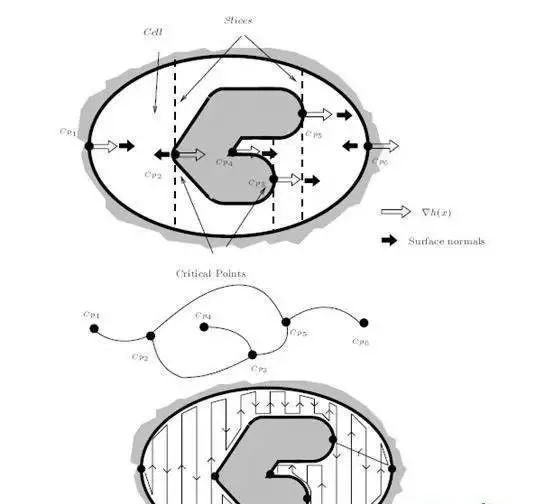
針對(duì)這些問(wèn)題,學(xué)術(shù)界長(zhǎng)久以來(lái)有一個(gè)專(zhuān)門(mén)的研究課題,叫做空間覆蓋(space coverage),同時(shí)也提出了非常多的算法和理論。其中,比較有名的是Morse Decompositions,掃地機(jī)通過(guò)它實(shí)現(xiàn)對(duì)空間進(jìn)行劃分,隨后進(jìn)行清掃。
20世紀(jì)70年代,卡內(nèi)基梅隴大學(xué)(CMU)完全依靠超聲波做到了現(xiàn)在我們掃地機(jī)的行為,當(dāng)然造價(jià)也十分昂貴。
前面介紹的從A點(diǎn)到B點(diǎn)移動(dòng)路徑規(guī)劃也是實(shí)現(xiàn)這類(lèi)更高級(jí)路徑規(guī)劃的基礎(chǔ)。實(shí)際上,要從SLAM實(shí)現(xiàn)到掃地機(jī)器人所需要的這些功能,還是有非常多的工作要做的。
編輯:黃飛
?









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論