低速CAN總線上為顯性電平(邏輯0)時,CAN_H為3.6V、CAN_L為1.4V,此時電壓差是2.2V。
2022-10-12 10:18:29 6268
6268 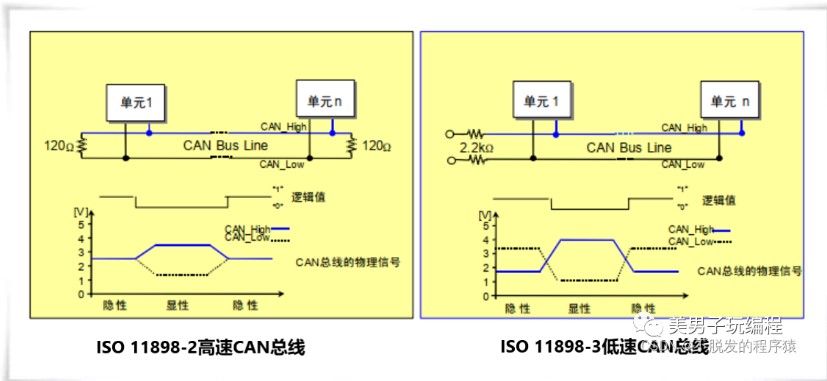
在ISO 11898-2和ISO 11898-3中分別規定了兩種CAN總線結構(在BOSCH CAN2.0規范中,并沒有關于總線拓撲結構的說明):高速CAN總線和低速CAN總線,區別表如下所示。
2023-04-07 09:30:181836 
CAN 控制器根據兩根線上的電位差來判斷總線電平。總線電平分為顯性電平和隱性電平,二者必居其一。發送方通過使總線電平發生變化,將消息發送給接收方。
2023-09-22 16:52:00739 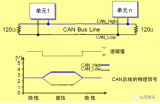
這意味著變送器通過CAN收發器改變總線電平,并將其信息傳輸到CAN總線。接收器通過監測總線電平將總線上的信息讀取到自己的CAN收發器中。
2024-02-19 14:53:54606 
現在的汽車已經不再僅僅是一種死氣沉沉的交通工具了。計算機的發明,也讓汽車有了一個職能的心。跟中嵌入式的計算機核心應用到汽車當中。那么如何規范這個核心的工作呢?這就需要CAN總線協議來幫忙了。現在
2014-04-27 15:16:02
匹配波形解釋邊沿臺階是怎么出現的,如何消除,對總線有何影響;一、邊沿臺階的源頭在CAN總線的網絡布局中,手牽手直線型拓撲是最理想最常規的布局;但是在實際現場中,經常會出現分支的現象。這里重點提一下,在
2019-10-07 07:00:00
在了解 CAN 總線協議以前,需要介紹有關協議中的基本概念。1.報文(Messages)在 CAN 總線傳輸的數據具有固定的格式和有限的長度,稱為報文。2.發送器(Transmitter)和接收器
2018-12-14 14:37:44
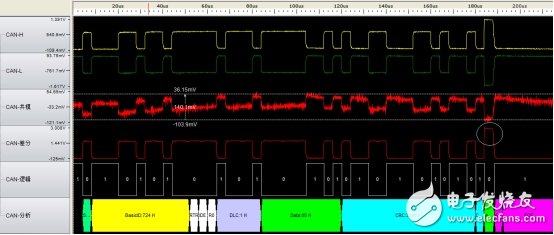
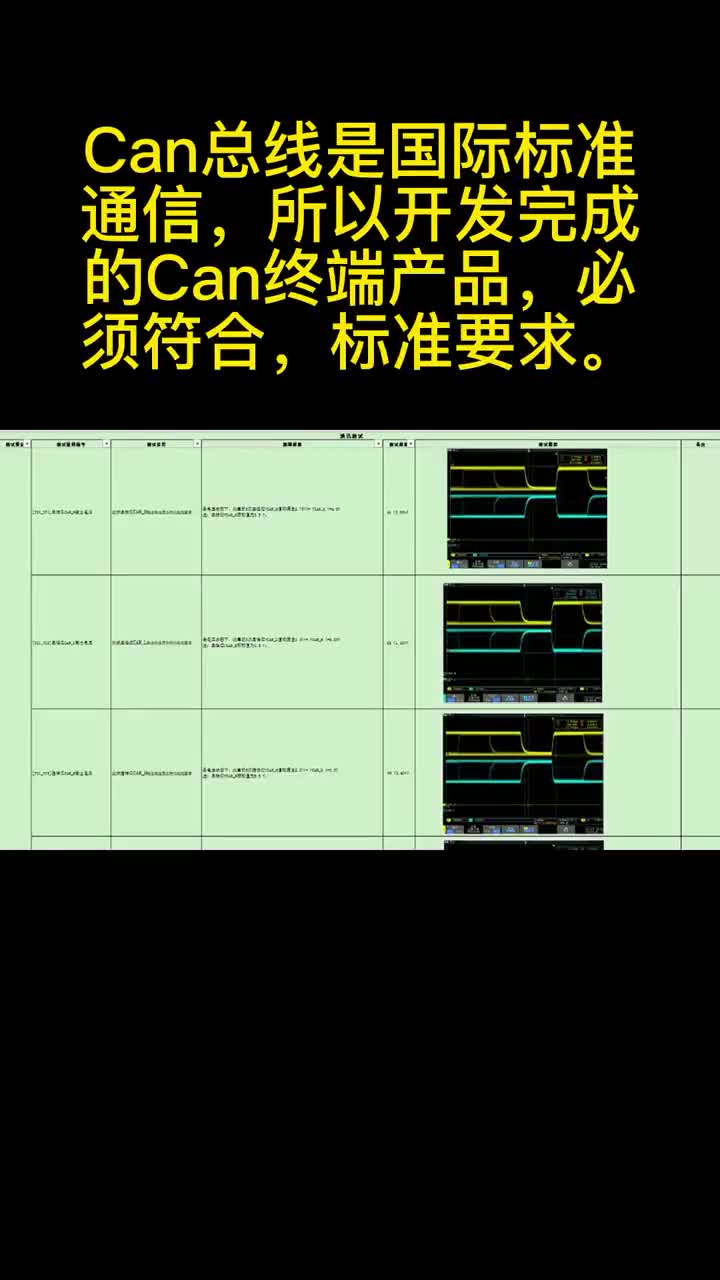
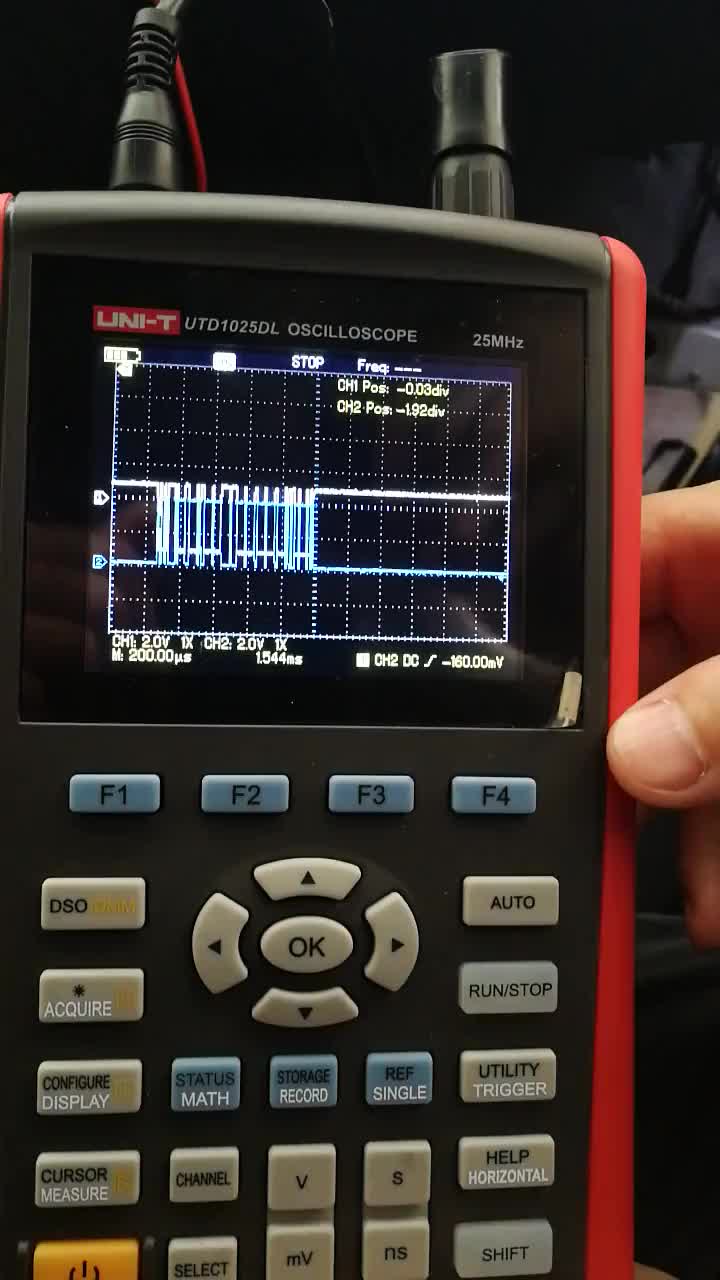
測量支持自動,和A-B通道差分。本次測試采用單線CAN_H對地的方式。外部為兩個CAN總線設備,將A通道表筆分別和CAN_H和地接好,啟動上升沿單次觸發方式。通訊中實際周期性的發送CAN的標準幀ID為
2020-08-19 09:27:19
現在的汽車已經不再僅僅是一種死氣沉沉的交通工具了。計算機的發明,也讓汽車有了一個職能的心。跟中嵌入式的計算機核心應用到汽車當中。那么如何規范這個核心的工作呢?這就需要CAN總線協議來幫忙了。現在
2014-04-18 16:36:30
嵌入式的工程師一般都知道CAN總線廣泛應用到汽車中,其實船艦電子設備通信也廣泛使用CAN,隨著國家對海防的越來越重視,對CAN的需求也會越來越大。這個暑假,通過參加蘇州社會實踐,去某船舶...
2021-11-08 06:02:04
。如果發送站未收到應答,那么表明接收站發現幀中有錯誤,也就是說,ACK場已損壞或網絡中的報文無站接收。CAN協議也可通過位檢查的方法探測錯誤。 4、總線檢測 有時,CAN中的一個節點可監測自己發出的信號
2017-10-19 11:12:46
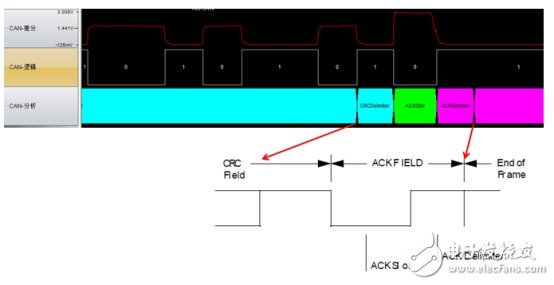
(ACK),此時總線電平為發送節點的隱性和接收節點的顯性線與為顯性電平,表明數據傳輸無誤,沒有錯誤發生。3. 下圖是CAN遠程幀:用于接收節點向具有相同ID的發送節點請求數據的幀。4. 下圖是CAN
2021-05-13 06:00:00
速率高、實時性強縮短了開發周期已形成國際標準的現場總線特點CAN總線是德國BOSCH公司從80年代初為解決現代汽車中眾多的控制與測試儀器之間的數據交換而開發的一種串行數據通信協議,它是一種多主總線
2015-11-05 17:17:31
現場總線VS工業以太網現場總線CAN總線(Control Area Network)一、CAN總線是什么?CAN總線的作用?CAN總線的優點CAN總線拓撲圖各接口協議速率對比
2021-08-06 07:44:19
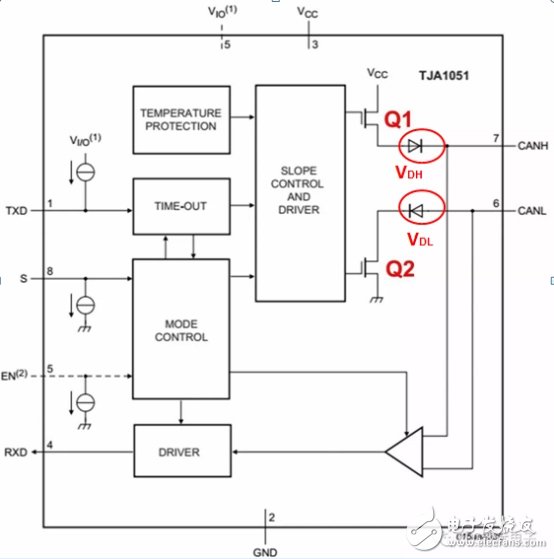
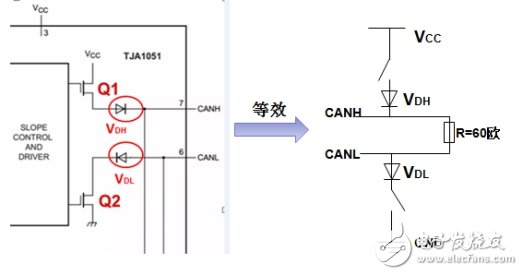
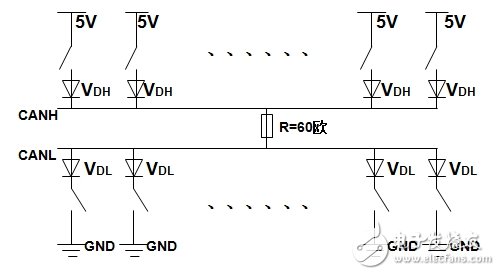
應答位電平偏高很多,模塊少一點相對會低一點,僅當只有兩個模塊時應答位電平才和正常數據顯性電平一制,不知道這個是怎么產生的,會不會影響到通訊或芯片壽命。下圖附示波器波形和模塊總線接口部分原理圖,CAN收發器用的TI的芯片
2016-10-27 11:39:41
CAN總線的仲裁是基于“線與原理(有一個0則為0,全部為1才為1)”,也即,總線上連接多個設備,只要有一個設備輸出低電平,那么總線上的電平就為低(這一現象在CAN領域稱為“顯性”);只有全部設備均
2022-01-19 06:57:59
:可以看到上圖中的當第一段為隱性(recessive),CAN_H和CAN_L電平幾乎一樣,也就是說CAN_H和CAN_L電平很接近甚至相等的時候,總線表現隱性的,而兩線點位差較大時表現為顯性的,按照
2018-09-21 20:32:41
的含義。 下面我們通過一個實例來看看CAN節點是如何進行ACK SLOT的動作的。我們抓取一個總線上面的信號波形,此波形已經是通過82C251解碼過后的。 此主題相關圖片如下: 抓取的波形,圖中
2018-07-02 05:22:54
CAN控制器通過兩根線上的電位差來判斷總線電平can.h#can.h#include"stm32f2xx.h" #ifndef __CAN
2021-08-19 09:14:30
錄1.Can總線電平介紹2.Can總線何時是空閑的3.Can總線的標準幀和擴展幀結構4Can總線幀類型4.1 數據幀4.2 遠程幀4.3 錯誤幀(1)錯誤情景分下面幾類(2)錯誤幀類型4.4 過載幀5.Can總...
2021-08-23 08:44:20
can節點,理論上,STM32就可以接入100多個串口設備了。但是,只使用一個【can串口】模塊,是無法使串口設備與STM32通信的,因為單片機都是TTL電平(0~3.3或5V),是無法與can總線(差分電平2.3V)通信的,所以必須有一個模塊能夠把單片機發出的信號轉換為CAN
2021-08-19 07:14:58
ADM3053偶爾出現問題。癥狀是ADM3053沒有通過ACK正確確認CAN消息。ADM3053后的CAN控制器嘗試發送主動電平,但ADM3053在CAN總線上保持被動。因此產生了主動錯誤幀,發射器
2018-12-05 09:17:05
的檢測,因為“丟失的”ACK將導致出現此錯誤幀。我們無法通過ADM3053觸發數據流中的丟失位,但根據我的觀點,如果ACK位丟失,所有其他位也可能丟失。丟失意味著邏輯低電平(必須是CAN總線上的主動
2024-01-03 09:00:17
具有優先權,只要有一個節點輸出顯性電平,總線上即為顯性電平。而隱形電平則具有包容的意味,只有所有的節點都輸出隱性電平,總線上才為隱性電平。CAN幀類型如下表1:CAN 包含了以下 5 種幀類型。其中
2021-12-27 19:05:53
DSP28335, eCAN模式,vp230收發器,隱形電平時為-1.5V,(為什么是負的)顯性電平CAN_H-CAN_L=1.3V左右,(不是應該大于2V嗎?)CAN_L有明顯的下降,但是
2013-12-13 21:04:25
主要問幾個CAN總線物理層上的問題1.CAN節點不接入總線網絡!!!(注意)(1).若此時對外輸出數據,STM32 can總線輸出引腳RX/TX(接入CAN收發器之前),用示波器觀察,是何種電平情況
2018-11-28 08:54:40
STM32 中的CAN總線模塊是具有故障監測功能的就是CANx_SCE_IRQHandler這個用的很少,它叫CAN總線狀態改變中斷通過打開這個中斷,配合代碼可以精確的監測CAN總線的故障情況就是
2021-08-19 08:20:11
輸出隱性電平,總線上才為隱性電平(顯性電平比隱性電平更強)
CAN的收發器
CAN_Rx和CAN_Tx分別是從MCU中接出來的引腳,比如MCU要發送一個邏輯1,則只要將CAN_Tx設置為1,經過CAN
2023-12-05 10:45:42
輸出隱性電平,總線上才為隱性電平(顯性電平比隱性電平更強)
CAN的收發器
CAN_Rx和CAN_Tx分別是從MCU中接出來的引腳,比如MCU要發送一個邏輯1,則只要將CAN_Tx設置為1,經過CAN
2023-12-04 14:47:44
labview怎么模擬汽車can總線的波形
2012-03-10 14:35:12
在CAN節點的設計中,我們通常為了總線的通訊更為可靠,為CAN接口增加各種器件,但實際并非所有應用都需要,過多防護不僅增加成本,而且器件的寄生參數必然影響信號質量。本文將簡單介紹共模電感用于總線
2019-08-28 07:00:00
CAN 總線(Controller Area Network)是控制器局域網的簡稱,是 20 世紀 80 年代初德國 BOSCH 公司為解決現代汽車中眾多的控制與測試儀器之間的數據交換而開發的一種
2018-12-13 14:26:31
在CAN節點的設計中,我們通常為了總線的通訊更為可靠,為CAN接口增加各種器件,但實際并非所有應用都需要,過多防護不僅增加成本,而且器件的寄生參數必然影響信號質量。本文將簡單介紹共模電感用于總線
2020-03-31 15:38:02
在CAN節點的設計中,我們通常為了總線的通訊更為可靠,為CAN接口增加各種器件,但實際并非所有應用都需要,過多防護不僅增加成本,而且器件的寄生參數必然影響信號質量。本文將簡單介紹共模電感用于總線
2020-03-31 15:38:53
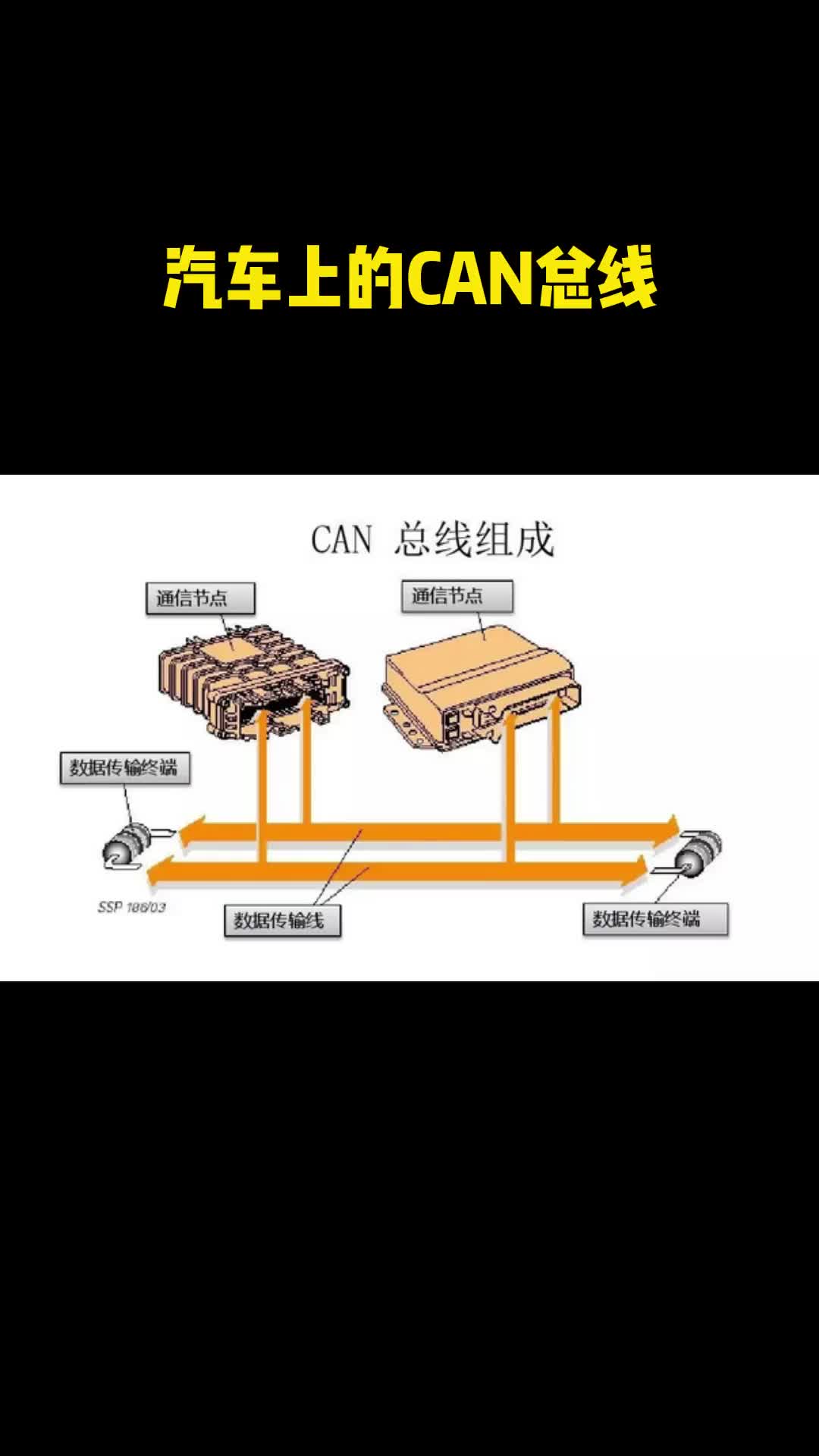
小編在這里要提個醒,在使用CAN總線的場合,不論是產品開發的過程中還是網絡搭建的時候,都需要對總線上終端電阻進行合理的安排。下圖中就是標準的總線式連接的終端電阻的安裝方式。那么這個終端電阻到底有什么用?可不可以省略?CAN總線的終端電阻的作用有兩個:
2019-11-08 17:23:32
下,環境的共模干擾串擾到CAN總線中會使節點A的差分電壓影響到0.9V以下,導致節點從顯性電平翻轉成為隱性電平,進而導致了節點A工作故障,頻繁發出錯誤幀。在CAN總線中,錯誤幀雖然不被接收,但是依然
2019-04-26 10:52:24
的。 正常情況下,邏輯高電平為1,邏輯低電平為0,但是CAN總線卻是邏輯高電平為0,稱為顯性,邏輯低電平為1,稱為隱性。所以,很多收發器的驅動器輸入端都會內置上拉電阻,在沒有任何輸入時,CAN總線就會表現
2021-03-23 08:30:00
在總線通信中,總線設備中的MCU需要連接一個總線收發器接入到總線網絡中,如果MCU的供電電壓與收發器電壓不匹配時,會出現什么情況?本文將以CAN總線為例從接口電平的角度為你解析電平匹配的重要性。一
2020-01-16 09:08:18
標識符緊跟著IDE位。· r1 – 保留4、CAN消息4.1 仲裁典型CAN的基本原理見圖4-1所示,從圖中可以看出,總線邏輯狀態與驅動器輸入和接收器輸出邏輯是相反的。正常情況下,邏輯高電平為1,邏輯
2021-03-08 10:04:15
,第三個01000101
圖2是第一數據輸入之后的波形,ACK應答位之后正常。
圖3是第二個數據和第三個數據輸入之后,ACK應答之后的波形,數據線(黃色)出現一個不正常高電平
2023-12-20 08:24:36
控制器局域網(CAN)是現代汽車網絡通信與控制系統中的重要組成部分,《汽車CAN總線系統原理、設計與應用》全面、系統地介紹了汽車CAN總線的基本原理、應用層協議制定、系統軟件和硬件設計,并且通過實例
2018-04-09 22:27:02
1.在CAN總線中存在5種錯誤類型,它們互相并不排斥,下面介紹一下它們的區別方式、產生的原因以及處理方法。l位錯誤,CAN網絡某個節點在向總線發送一個位的同時也在監測總線,當檢測到總線位的電平
2015-07-09 13:54:46
鑒于目前基于RS-485通信的監控系統的一些問題,本文闡述了用微控制器P87C591和現場總線技術實現基于CAN總線的監控系統,還詳細說明了RS-232與CAN總線轉換器和基于CAN總線的云臺控制
2009-07-09 10:06:47 36
36 文中分析了CAN總線的發展和汽車CAN總線技術的特征,對CAN總線在汽車領域的應用進行了深入的探討。
2011-12-14 14:58:1084 控制器局域網總線(CAN,Controller Area Network)是一種用于實時應用的串行通訊協議總線,它可以使用雙絞線來傳輸信號,是世界上應用最廣泛的現場總線之一。CAN協議由德國的Robert Bos
2012-09-10 09:22:53197509 
24C02中IIC總線的應答信號(ACK)時序圖分析,很好的單片機學習資料。
2016-03-21 17:30:0693 一款隔離型通用CAN收發器模塊。該模塊內置CAN總線通訊接口信號隔離及收發器件,具有成本低體積小、使用方便等優點。其主要功能是將CAN總線控制器的邏輯電平隔離轉換為總線的差分電平,信號傳輸過程中隔離電壓高達2500VDC。
2016-11-18 18:01:3429 CAN總線一直以實時性強、傳輸距離遠、抗干擾能力強、數據保證到達等特點而廣泛應用于高可靠性的場合。
2017-07-11 15:45:5319 局部錯誤,全局通知是CAN總線錯誤類型中較為典型的一種,如何通過錯誤報文及波形快速定位錯誤原因呢?本文結合現場實測案例簡要分析。 一、CAN總線錯誤簡介 在CAN總線中存在5種錯誤類型,如圖1所示
2017-11-08 10:48:573 現在的總線格式很多,CAN相對于其他的總線有什么特點啊?有什么特別的優勢,讓我們必須選擇這種總線呢?這個問題問的好,所以我想與其它總線做一下比較,首先呢,就比較一下大家耳熟能詳的485總線吧。其實485總線與232差不多,它們只定義了物理層,規定了電平標準。下面我們進行詳細的對比。
2017-11-27 11:11:03107541 
CAN 總線的物理連接只需要兩根線,常稱為 CAN_H 和 CAN_L,通過差分信號進行數據的傳輸。CAN 總線有兩種電平,分別為 隱性電平 和 顯性電平,這兩種電平有著類似漏極 I/O 電平信號之間“與”的關系:
2018-07-11 16:31:0012767 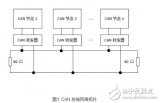
的2根線(CAN-H和CAN-L)的電位差來確定總線的電平,在任一時刻,總線上有2種電平:顯性電平和隱性電平。 “顯性”具有“優先”的意味,只要有一個單元輸出顯性電平,總線上即為顯性電平,并且,“隱性”具有“包容”的意味。
2017-12-27 13:40:0730720 
CAN已經形成國際標準,并已被公認為幾種最有前途的現場總線之一。CAN 總線的數據通信具有突出的可靠性、實時性和靈活性。由于其良好的性能及獨特的設計,CAN總線越來越受到人們的重視,它在汽車領域上的應用是最廣泛的。接下來及跟隨小編一起來了解一下CAN總線的工作原理、特點及優缺點、應用領域及應用案例吧。
2018-05-07 10:36:3933700 
摘要:如果CAN總線中有多個節點,在某一點測試CAN總線的波形(CANH和CANL之間)時,會發現在一幀數據的末尾ACK位的差分電平會偏高。網上有關于此問題的一些描述和解釋,但孔丙火認為欠妥,因此
2018-06-14 13:44:284056 使用CANScope測量CAN總線信號,在干擾很嚴重的情況下會出現CAN總線波形解碼與CAN報文解碼不一致的情況,具體表現為某些正確報文對應的波形解碼卻是錯誤的,或者收到的錯誤報文對應的波形解碼卻是正確的,如圖1中,幀ID為0x721的正確報文對應的波形解碼卻為CRC錯誤。
2019-12-06 07:57:004399 
本文說的CAN即是一種總線,也是一種協議。因此,我們常聽見CAN總線,也常聽見CAN協議。CAN協議和CANOpen協議是兩套不同的協議。從軟硬件層次來劃分,CAN協議屬于硬件協議,而CANOpen
2018-10-03 19:53:0073332 
此CAN總線上有干擾,導致CAN控制器發生接收錯誤,CAN總線上的信號經過收發器轉化為差分電平信號,此時信號容易受到外界干擾,這樣容易使CAN控制器發生接收錯誤。
2018-10-08 14:31:514590 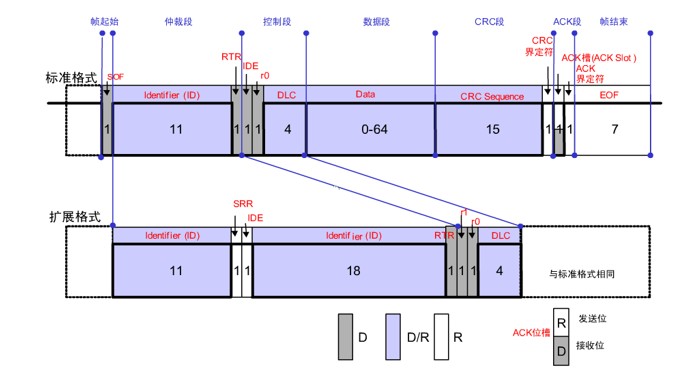
本文檔額度主要內容詳細介紹的是CAN總線教程之CAN總線快速入門資料免費下載主要內容包括了:CAN總線概述,數據鏈路層,物理層
2018-12-07 17:20:39201 報文處理部分通過CAN收發器將總線上的CANH和CANL差分信號轉成單端的數字信號RXD,再使用專用的CAN控制器接收RXD信號并進行CAN協議解碼,最后將解碼后的報文進行接收存儲;波形處理部分通過
2019-11-11 09:55:072678 
讀CAN總線的書時,都會涉及到總線電平的問題,CAN總線的電平分為顯性電平與隱性電平,這是CAN總線物理層的核心部分,也是總線仲裁的基礎。那何為顯性,何為隱性呢?
2021-04-19 16:58:1621 以MSCAN08和MSCAN12為示例,講述CAN現場總線,初步掌握CAN總線技術的應用。
2021-04-20 16:12:35287 CAN總線是什么意思 CAN的全稱是Controller Area Network,中文名稱是控制器局域網絡,是由德國BOSCH公司開發的,并且最后成為國際標準,這是目前應用最多的現場總線之一。現場
2021-08-07 16:37:1317486 很多的司機朋友以及工控圈的朋友都有聽到過“CAN總線”一詞,今天我們就來一起看一下CAN總線為什么這么火? CAN總線,也叫做控制器局域網總線(Controller Area Network
2022-01-15 17:04:485782 在本系列文章中,我們將為您詳細介紹CAN總線錯誤的相關知識,包括CAN總線錯誤的基礎概念、CAN總線錯誤的類型、CAN錯誤幀和CAN節點錯誤狀態,并通過實際的應用測試生成并記錄CAN錯誤。
2022-06-13 16:08:347206 高速CAN總線上為顯性電平(邏輯0)時,CAN_H為3.5V、CAN_L為1.5V,此時電壓差是2V,顯性狀態的CAN總線電壓范圍。
高速CAN總線上為隱性電平(邏輯1)時,CAN_H和CAN_L都為2.5V,此時電壓差就是0V,隱性狀態的CAN總線電壓范圍。
2022-09-13 16:57:223631 在這里你可能要問“不都有CAN總線了嗎?這個LIN總線又是從哪里來的?”其實理由很簡單,就是CAN總線太貴啦!處處都用CAN總線的話,那整車的總線架構成本將會變得很高!在一些比如車身電子配件的地方
2023-02-13 13:50:003329 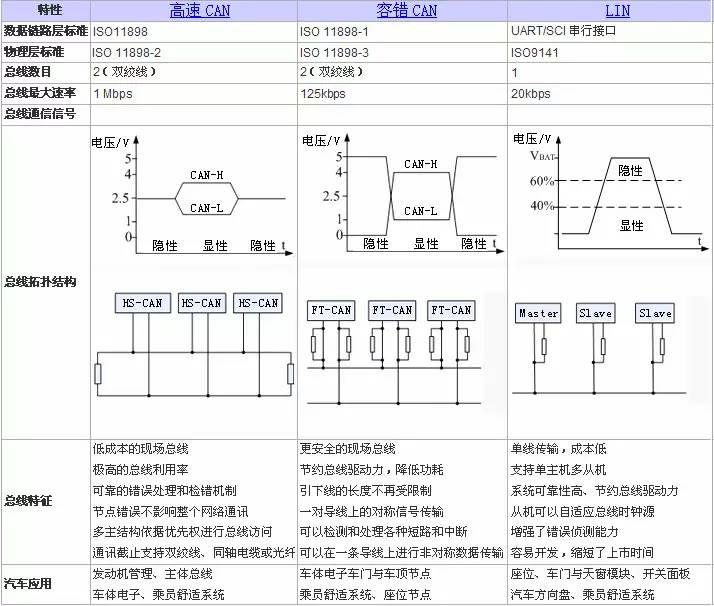
即從CAN控制芯片輸出邏輯電平到CAN收發器,然后經過CAN收發器內部轉換將邏輯電平轉換為差分信號輸出到CAN總線上,CAN總線上的節點都可以決定自己是否需要總線上的數據。
2023-03-29 10:06:167598 眾所周知,CAN總線的傳輸方式是差分傳輸方式,而總線電平的判斷,就是CAN收發器根據CANH和CANL線纜之間的差分電壓(CANH-CANL)來判斷的,總線上傳輸的電平信號只有兩種可能,一是顯性電平,二是隱性電平,其中顯性電平代表邏輯0,隱性電平代表邏輯1。
2023-06-09 17:22:033734 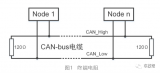
AsimpleintrotoCANerrorsCAN總線錯誤介紹在本系列文章中,我們將為您詳細介紹CAN總線錯誤的相關知識,包括CAN總線錯誤的基礎概念、CAN總線錯誤的類型、CAN錯誤幀和CAN
2022-06-09 09:46:531176 
AsimpleintrotoCANerrorsCAN總線錯誤介紹在本系列文章中,我們將為您詳細介紹CAN總線錯誤的相關知識,包括CAN總線錯誤的基礎概念、CAN總線錯誤的類型、CAN錯誤幀和CAN
2022-06-02 09:41:24813 作者|Andrei小編|吃不飽當ECU之間使用CAN來進行通信時,總線上發生了什么?我們可以借助示波器來觀察總線上的電平,而從示波器上我們可以看到一串連續的高低起伏的“線條”——波形。無論是電磁波
2023-01-29 13:56:39741 
CAN 電氣屬性 CAN 總線使用兩根線來連接各個單元:CAN_H 和 CAN_L,CAN 控制器通過判斷這兩根線上的電位差來得到總線電平,CAN總線電平分為顯性電平和隱性電平兩種。顯性電平表示邏輯
2023-07-25 10:30:41632 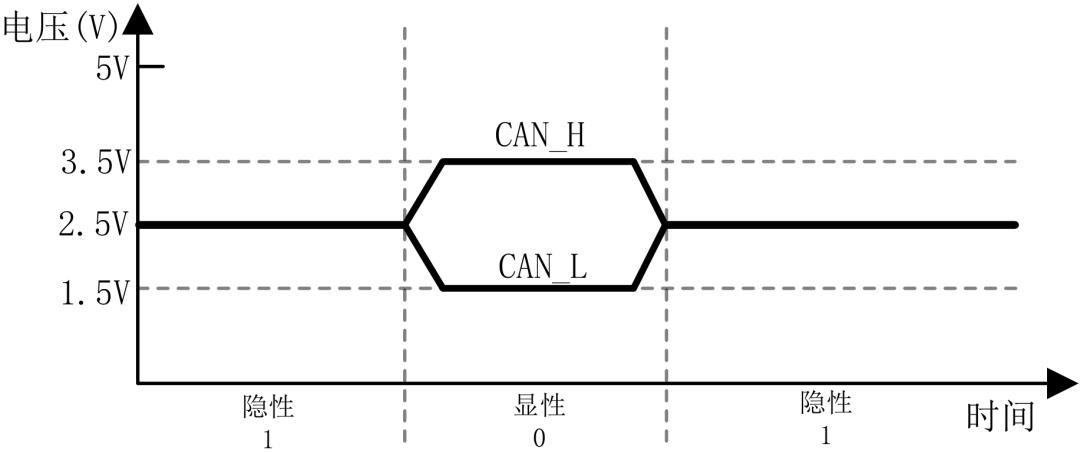
認識CAN 總線錯誤的第一步就是了解認識CAN 總線協議和它的具體功能,這樣才能更容易地理解CAN 總線是如何去發現并解決錯誤的。
2023-08-14 15:18:463228 
can總線負載率多少合理? CAN總線是一種控制器區域網絡,它是用于在不同設備之間進行通信的技術。CAN總線的應用領域廣泛,例如汽車、航空航天、醫學儀器等。在CAN總線中,數據通過網絡傳輸,并且在
2023-09-07 15:05:412173 can總線為什么要用雙絞線?can總線不用雙絞線可以嗎? CAN總線是一種數據通信協議,廣泛用于汽車、航空、船舶、工業自動化、機器人等領域。CAN總線采用串行通信方式,主要用于實現多個模塊之間的通信
2023-09-14 16:48:053603 當出現CAN L 對地短路這種故障時,根據CAN總線的容錯特性,可能出現整個CAN網絡無法通信的情況或產生相關故障碼。 但是對于某些車系,如海馬車系,其CAN L對地短路的容錯特性較好,車輛基本能
2023-09-14 16:51:491267 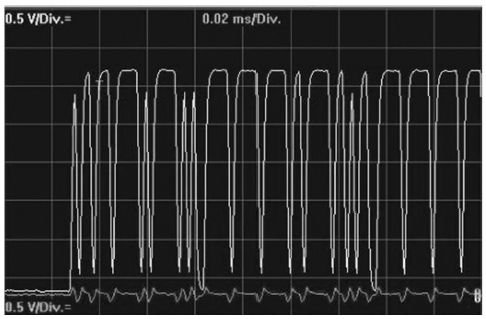
CAN H 電壓也被置于12V。CAN L 對電源短路的總線波形如下圖所示。 實際測量CAN導線的電壓,若CAN L 和CAN H 導線電壓都約為12V,則說明出現此類故障。 故障原因:如果不是CAN L 導線對外部電源短路引起的,那么這種故障就有可能是控制模塊內部的CAN收發器損壞造成的。故障查找
2023-09-14 16:57:081113 
CAN控制器根據兩根線上的電位差來判斷總線電平。總線電平分為顯性電平和隱性電平,二者必居其一。發送方通過使總線電平發生變化,將消息發送給接收方。 顯性電平對應邏輯 0,CAN_H 和 CAN
2023-10-27 14:55:281008 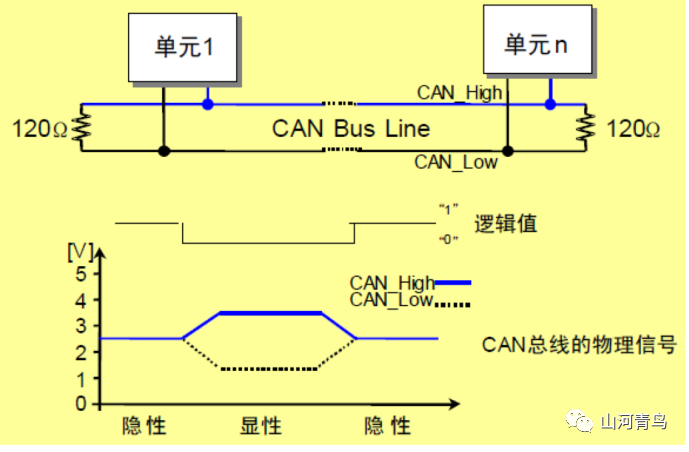
差分傳輸,為了避免信號的反射和干擾,還需要在CAN_H和CAN_L之間接上120歐姆的終端電阻。 每一個設備既可做主設備也可做從設備。CAN總線的通信距離可達10千米(速率低于5Kbps),速度可達1Mbps(通信距離小于40M)。 CAN電平邏輯 CAN總線采用”線與”的規則進行總線沖裁,
2023-11-09 18:11:50656 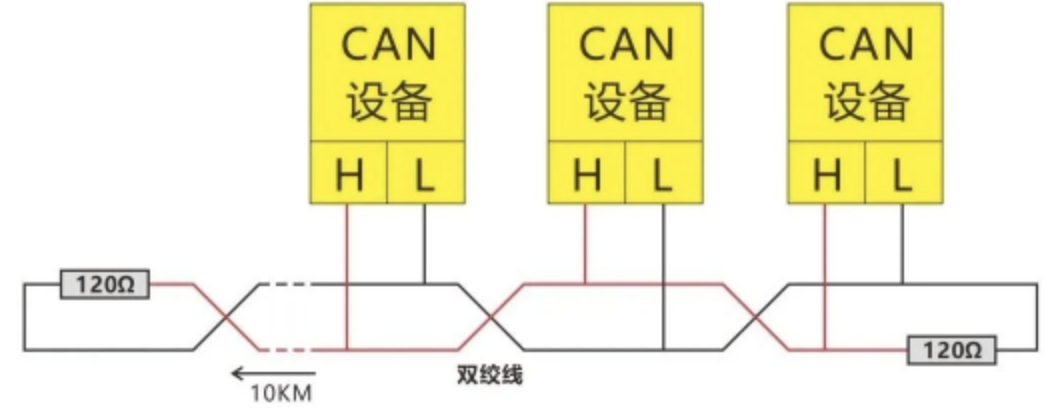
、高速性和優秀的網絡管理能力。 在CAN總線中,數據通過兩根線進行傳輸,即CAN-H線和CAN-L線。CAN-H線為高電平,CAN-L線為低電平。這兩根線同時傳輸數據,其中高優先級的消息可以覆蓋低優先級的消息。這種雙線傳輸的機制使得CAN總線能夠同時傳輸多個
2023-12-07 18:09:401216 CAN總線通訊協議由德國博世于上世紀80年代發明,第一個使用CAN總線通訊協議的量產車型是1991年的奔馳S級轎車,至今CAN總線依舊是車內主要的通訊總線。隨著汽車電子智能化加速,CAN總線也開始
2023-12-21 14:03:45663 
CAN總線共模電感是應用于CAN總線通信中的一種電子元件,用于解決CAN總線通信中的共模干擾問題。本文將詳細介紹CAN總線共模電感的定義、作用、選型要點以及常見注意事項,并且結合實際案例進行分析
2024-01-05 13:42:34748 高速CAN總線和低速CAN總線的特性 高速CAN總線和低速CAN總線是兩種常見的CAN總線類型。它們在數據傳輸速率、最大電纜長度、適用場景等方面存在一些差異。下面將詳盡、詳實、細致地介紹這兩種CAN
2024-01-31 14:09:01497
 電子發燒友App
電子發燒友App



















 工商網監
工商網監
評論