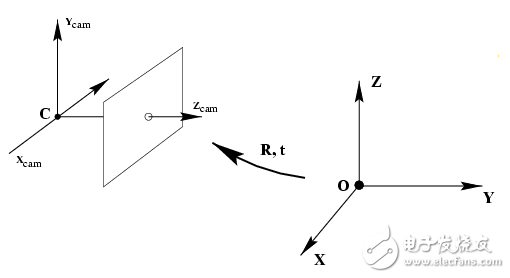
相機標定中所要確定的幾何模型參數分為內參和外參兩種類型。相機內參的作用是確定相機從三維空間到二維圖像的投影關系。相機外參的作用是確定相機坐標與世界坐標系之間相對位置關系。
2022-10-12 16:04:18 2245
2245 單目相機標定技術適用于被測表面曲率較小且需要獲取實際數據的應用場合,比如食品、機械制造以及半導體等。
2023-07-21 11:32:272355 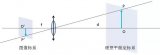
Halcon旋轉標定固定相機,從下往上拍照,計算產品到標準位置的偏差,如果產品有角度偏差,那就要額外減去旋轉產生的X、Y偏移,都說取點擬合圓,圓心就是旋轉中心點,可是我擬合出來的圓心轉換成機器人
2021-11-09 15:36:24
幾篇張正友標定方法的英文原文,不少朋友看過張正友標定方法,這里提供他的英文原文。喜歡看英文文獻的,以及愿意更深入理解matlab中相機標定工具箱的朋友可以參考。
2018-05-04 14:43:25
這里相機標定主要內容包括:圖像的采集、相機參數獲取、TOOLBOX_calib可視化描述一、相機標定感謝博主的代碼分享,這里主要參考了一些(https://download.csdn.net
2021-08-18 07:24:03
相機包帶加厚肩帶 攝影包相機包電腦包減壓彈力單肩帶 背帶金屬扣
2023-03-28 13:03:52
``【課程推薦】龍哥手把手教你學LabVIEW機器視覺設計教程請問哪位大神有Labview機器視覺相機標定的程序文件,麻煩分享一下?在下不甚感激!qq:599108466.``
2016-05-25 12:36:45
相機標定不成功點擊下一步沒反應
2015-04-16 12:58:59
labview標定圖片不成功 點擊下一步沒反應
2015-04-16 12:57:25
最近在做視覺,需要用labview做相機的標定,通過空間轉換確定空間位置。視覺助手的標定只能標定內參數,沒有辦法做內外參數的標定,哪位大神給指導指導如何做一個標準的標定程序。
2017-04-24 16:08:44
;amp;extra=2.基于opencv的相機標定:為了實際項目中使用相機用于尺寸測量,普通相機的畸變一般都是比較大的,特別是中心區域,所以在使用前需要對相機進行畸變校正,測量出相機的內參,完成
2017-06-10 15:59:38
項目名稱:圖像處理-攝像頭標定試用計劃:香蕉派基于OPENCV的安裝教程網上幾乎都是基于apt-get install安裝的,這種安裝方式有個非常大的缺項就是還有很多庫不能被支持,造成無法使用完
2017-04-10 15:42:05
方法,一種是lemaker官方提供的Opencv安裝包,另一種則普遍使用的方法。下面看具體步驟:方法一步驟1:添加Lemuntu更新源方法:獲取并保存Keywget http
2016-02-25 12:49:48
的效果。如上圖,我這里通過V4L2獲取了UVC相機拍攝的圖片,視場中有一個標定靶,我們通過OpenCV里的庫函數識別出兩個圓的位置,并加以跟蹤,在圓心處繪制藍色的點。 1024 x 768的分辨率,幀頻在
2017-05-21 22:17:46
是左右相機拍攝同一塊圓形標定板的圖像,并根據labview自帶的圓點標定板圓點檢測函數得到圓點坐標。下圖是加載圓點標定板標定結果后,加載一對圖像后,鼠標移動到左圖上顯示的距離信息。程序框圖分3部分
2021-09-27 16:52:18
主要內容本文提出了一種不依賴于棋盤格等輔助標定物體,實現像素級相機和激光雷達自動標定的方法。方法直接從點云中提取3D邊特征,一避免遮擋問題,并且使用了精確度更高的深度連續邊。文中首先指出:以下四種
2021-09-01 07:42:19
目標平面與成像平面平行,但是攝像頭與目標平面相對位置是改變的,那么:1,相機標定后獲得的參數還能不能用,因為我看有的說相機標定后的參數用于相機與工作平面的相對位置不變。所以不知道了2,如果參數不能
2016-05-20 15:49:27
1、編譯opencv+tengine后端與usb相機不識別的解決方法下載opencv連接開發板,需要一個掃描ip的工具,和遠程的工具開機前掃一下,開機后掃一下,多出來的就是板子的IP地址,配合遠程工具,解決沒有屏幕的煩惱原作者:徐國晟
2022-06-15 18:16:57
,如何使用大標定板統一坐標來做高精密測量。采用一塊維視圖像大標定板來統一各個相機的坐標,每個大標定板中有若干小標定板,各個小標定板間的位置關系都是已知的,各個相機都能拍攝到一個小標定板。通過各個小標定板可以
2015-11-18 11:05:45
如何把opencv安裝到ARM板中去呢?有哪些安裝步驟?
2022-03-07 07:27:56
小白求助,求相機標定示例
2021-11-22 07:43:41
現在有一款相機配合遠心鏡頭使用,產品比較小,比較精密,視野也很小,差不多也就1厘米吧,像這種情況一般怎么進行標定,是用那種比較精密的標定板嗎?還有別的辦法嗎?論壇有視覺大神答疑解惑嗎?
2020-01-03 16:58:31
lidar_camera_calibration項目——激光雷達和相機聯合標定
2019-04-12 09:27:38
有個項目要用視覺定位,視覺拍好產品之后,把產品的坐標發送到PLC,PLC再執行定位指令。現在查到的資料都沒有涉及這一塊,都是講相機標定,而不是手眼標定。哪位有這方面的資料,怎么用labview實現手眼標定?
2020-05-28 14:42:35
提出一種無相機標定的立體圖像對的極線校正新方法。該校正方法并不依賴基本矩陣F的精確求解,而是通過空間變換法分析校正前后圖像點對應關系,依此分解并參數化描述極線變
2009-04-14 08:40:01 12
12 光學標定板應用領域宏誠光學玻璃系列標定板和陶瓷系列標定板是專為高校實驗、研究單位項目研發和機器視覺集成商產品標定等等客戶群體使用的常用標定工具,能夠方便獲得相機的標定數據。標定板作用:為校正鏡頭畸變
2022-09-20 08:14:32
本文提出一種基于圖像輪廓進行相機自標定并計算投影矩陣從而恢復物體三維模型的方法。首先使用鏡面反射從圖像中獲取物體的多角度成像并利用閾值和邊緣提取得到圖像的輪
2009-12-07 11:53:5019 matrox mil開發資料:CALIBRATION相機標定模塊
2015-12-10 16:32:068 opencv備忘單,opencv_cheatsheet,opencv_tutorials,opencv_user,opencv2refman2
2016-08-25 15:52:390 什么是攝相機標定?攝相機標定方法的分類?感興趣的小伙伴們可以瞧一瞧。
2016-09-22 12:04:450 本文CameraCalibrator類源代碼來自于OpenCV2 計算機視覺編程手冊(Robert Laganiere 著 張靜 譯) 強烈建議閱讀機器視覺學習筆記(4)——單目攝像機標定參數
2017-02-08 03:36:38523 (4)——單目攝像機標定參數說明? 機器視覺學習筆記(5)——基于OpenCV的單目攝像機標定? 機器視覺學習筆記(6)——雙目攝像機標定參數說明 1.雙目攝像機標定目的 雙目攝像機標定最主要的目的就是要得出左右兩個攝像機的相對位置關系,但是在OpenCV中,計算表示左右攝像機位置的矩陣R和T的同時,也可
2017-02-08 03:41:12578 問題,、提出一種基于雙目視覺的投影儀標定算法,將投影儀視為逆向相機,利用一個輔助相機捕獲投影于不同位置標定平面,確立攝像機圖像與標定平面之間的對應關系,然后利用極線原理得到攝像機圖像與投影儀圖像之間的對應關
2017-11-06 15:30:2120 越來越覺得python是一強大的工具,處理樣本確實不錯。最近因項目需要涉及到圖片處理,所以開始用python調用opencv,再次覺得python真乃神器也!
2017-12-04 15:29:524215 OpenCV sample目錄下自帶兩個與相機標定的cpp文件即:calibration.cpp和calibration_artificial.cppcalibration.cpp 是通過用戶輸入
2017-12-04 17:23:263426 
針對基于C形臂的手術導航系統中相機標定這一關鍵技術中存在的過渡環節過多、參數求解過程復雜等問題,提出一種完全忽略相機模型的解決方法。該方法完全忽略相機模型,在映射參數求解過程中簡化了過渡環節,使得
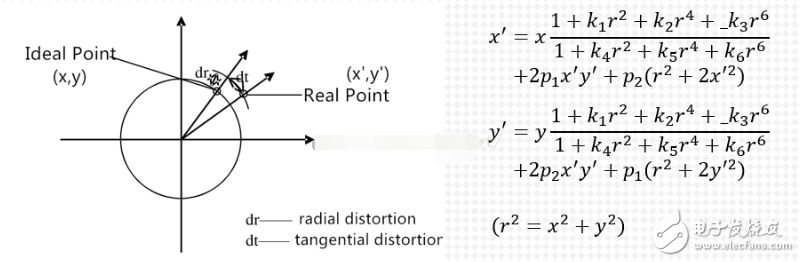
2017-12-14 15:31:305 針對張正友標定方法中相機內參數的求解可能陷入局部最優解的問題,考慮鏡頭的三階徑向畸變和二階離心畸變,提出一種基于改進遺傳算法的單目相機內參數優化標定方案。該方法可顯著提高相機標定中內參數的精度,并能避免陷入局部最優。最后,實驗驗證了所提方案的有效性和可行性。
2018-01-05 16:11:491 在應用機器視覺進行檢測或測量時,要得到精確的測量值,需要相機CCD平面和實際檢測或測量零件的表面相平行。否則,將發生透視性失真,從而很難保證精度。相機CCD與零件表面的平行通常通過人工調整夾具來保證。但是,調整夾具不可能完全保證平行,而且需要耗費很長的時間。
2020-05-26 08:02:004601 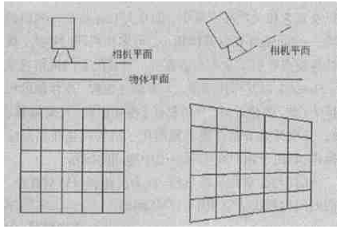
OpenCV是一個跨平臺的計算機視覺庫,可以運行在Windows、Linux、MacOS等操作系統上。OpenCV提供了眾多語言的接口,其中就包含了Python,Python是一門上手容易、使用起來十分讓人愉悅的語言,利用Python學習OpenCV,相信能更快的獲得效果。
2019-04-12 15:30:011473 相機標定可以說是計算機視覺/機器視覺的基礎,但是初學者不易上手,本文將給讀者整理一遍相機標定的邏輯,并在文末回答評論區提出的問題。分為以下內容:
2019-06-01 09:54:153969 
為了在精確測量中盡量消除誤差,標定CCD相機在實際測量環境中的內部參數有著重要的意義。
2020-03-21 11:58:0514 這種情況的標定過程實際上和相機和機械手分離的標定方法是一樣的,因為相機拍照時,機械手會運動到相機標定的時候的位置,然后相機拍照,得到目標的坐標,再控制機械手,所以簡單的相機固定在末端的手眼系統很多都是采用這種方法,標定的過程和手眼分離系統的標定是可以相同對待的。
2020-07-11 09:57:505354 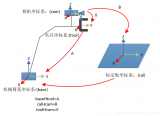
在實際控制中,相機檢測到目標在圖像中的像素位置后,通過標定好的坐標轉換矩陣將相機的像素坐標變換到機械手的空間坐標系中,然后根據機械手坐標系計算出各個電機該如何運動,從而控制機械手到達指定位置。這個過程中涉及到了圖像標定,圖像處理,運動學正逆解,手眼標定等。
2020-08-28 11:42:4610854 
在圖像測量過程以及機器視覺應用中,為確定空間物體表面某點的三維幾何位置與其在圖像中對應點之間的相互關系,必須建立相機成像的幾何模型,這些幾何模型參數就是相機參數。
2020-08-28 15:18:0812721 采用張正友提出的基于2D平面棋盤格的攝像機標定方法,利用Matlab攝像頭標定工具完成相機參數的標定。
2020-08-31 10:04:124714 
轉自:微信公眾號AI圖像 創建標定數據模型 你可以用算子create_calib_data創建一個標定數據模型,指定相機和標定物體的數量。當用一個相機的時候,你也用一個單獨的標定物體。 然后,你要做
2020-10-31 11:31:383434 
標定板特征成像不能出現明顯的離焦距,出現離焦時可通過調整調整標定板的距離、光圈的大小和像距(對于定焦鏡頭,通常說的調焦就是指調整像距)。
2020-11-01 11:26:413510 這幾天把基于opencv C++ api將魚眼鏡頭的雙目標定以及測距功能實現完畢,效果還可以,至少對齊得非常棒。 這里把其流程及其關鍵函數在這...
2020-12-08 22:11:06939 張正友相機標定法是張正友教授1998年提出的單平面棋盤格的相機標定方法。傳統標定法的標定板是需要三維的,需要非常精確,這很難制作,而張正友教授提出的方法介于傳統標定法和自標定法之間,但克服了傳統標定
2020-12-31 10:06:195420 
相機標定在計算機視覺領域中有著至關重要的作用。絕大多數相杋標定方法假設相機為針孔模型,且需要良好聚焦的圖像來保證相機內外參估計的準確性。然而,這些條件會受到相機景深的影響。在薄透鏡相機模型假設
2021-04-21 15:05:5716 本文是本人的經驗總結,不代表標準理論,有錯誤請指正; 主要講解上下雙相機定位貼合的原理和實現過程,包括各種標定、組合使用及具體的halcon源碼實現,適用于的X、Y、Z三軸加一旋轉軸系統,如模組
2021-05-08 10:05:1834063 
針對魚眼鏡頭的高精度標定需求,提岀一種基于除法畸變模型的線性標定方法。通過除法模型將題轉換為線性方程組求解問題相機畸變中心后對畸變方程矩陣進行解耦,分別求解相機內外參數和畸變系數實現魚眼鏡頭的快速魯棒標定。實驗結果線性標定方法相方法在保證標定準性和可靠性計算效率提高了約10倍。
2021-05-19 11:39:057 相機固定不動, 上往下看引導機器人移動 機器人與視覺標定理論詳解 1.相機非線性校正使用標定板做非線性校正2.相機與機器人做9點標定可以使用機器人扎9個點,或者機器人抓住工件擺放9個位置,得到
2021-05-27 14:15:533250 
,在該范圍內隨機生成參數作為初始值,然后以最小平均誤差為準則,利用灰狼粒子群優化混合算法,建立目標函數,進一步求解相機的內外參數。研究結果表明,該算法求解結果準確、穩定,可重復操作,可以有效地提髙標定精度,結果好于
2021-05-31 11:09:515 在這里我們所說的雙目標定是狹義的,講解理論的時候僅指兩臺相機之間相互位置的標定,在代碼實踐的時候,我們才說完整的雙目標定。
2021-07-04 11:04:1610836 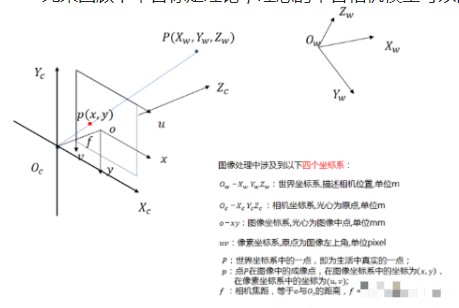
為什么要進行單相機標定? 廣義:畸變矯正和一維和二維測量 畸變矯正: 在幾何光學和陰極射線管(CRT)顯示中。畸變是對直線投影的一種偏移。簡單來說直線投影是場景內的一條直線投影到圖片上也保持為一條
2021-09-02 09:45:383084 在大多數條件下,這些參數必須通過實驗與計算才能得到。無論是在圖像測量或者機器視覺應用中,相機參數的標定都是非常關鍵的環節,其標定結果的精度及算法的穩定性直接影響相機工作產生結果的準確性。
2022-06-21 11:12:347612 在實際控制中,相機檢測到目標在圖像中的像素位置后,通過標定好的坐標轉換矩陣將相機的像素坐標變換到機械手的空間坐標系中,然后根據機械手坐標系計算出各個電機該如何運動,從而控制機械手到達指定位置。這個過程中涉及到了圖像標定,圖像處理,運動學正逆解,手眼標定等。
2022-08-18 15:54:375452 來自CMU Robotics Institute, 已知最早3D Laser與相機標定的工作(2005年),基于matlab的圖形用戶界面,進行激光雷達相機外參標定。
2022-11-10 14:59:262577 張正友相機標定法是張正友教授1998年提出的單平面棋盤格的相機標定方法。傳統標定法的標定板是需要三維的,需要非常精確,這很難制作,而張正友教授提出的方法介于傳統標定法和自標定法之間,但克服了傳統標定
2022-11-14 10:14:402381 因為相機成像的模型比較復雜,所以依賴于一張圖像來標定相機是不可靠的。但是我們可以把世界坐標固定在標定板上,通過轉動和平移標定板來得到多幅不同的圖像。
2022-11-22 10:34:053070 OpenCV對學術用途和商業用途都免費。它有C++、C、Python和Java的接口,并且支持Windows、Linux、MacOS、iOS和Android系統。在我的OpenCV教程系列中,我們將專注于使用樹莓派(當然,操作系統就是Raspbian了)和Python。
2022-11-29 10:36:17574 相機標定可以歸納為P?n?P(Perspective-n-Point)的問題,即已知三維物點坐標和對應的二維投影坐標,求解相機參數。由于鏡頭的畸變(徑向和切向)帶來非線性成像模型,一般求解方法分為兩步:
2022-12-21 09:52:30856 在這里我們所說的雙目標定是狹義的,講解理論的時候僅指兩臺相機之間相互位置的標定,在代碼實踐的時候,我們才說完整的雙目標定。
2022-12-28 17:17:241978 改變系統相對標定板的位姿,重復步驟34,拍攝>15組數據。使用拍攝的標定板圖片進行相機標定,獲得相機內外參,并保存每個標定板的角點位置信息。
2022-12-29 09:57:22406 相機畸變是影響相機標定精度的關鍵因素。由于畸變補償不準確,傳統的標定方法不能滿足要求較高標定精度的測量系統的要求。本文提出了一種基于迭代畸變補償算法的新型相機標定方法。相機的初始參數由全場相機像素
2023-01-05 10:18:32780 后臺建模包括兩個主要步驟,后臺初始化和后臺更新,背景減除在OpenCV中的是cv::BackgroundSubtractor類,
2023-01-18 15:15:00822 
,棋盤格,不對稱的圓和棋盤格。 標定板尺寸 在選擇標定板時,一個重要的考慮因素是它的物理尺寸。這最終關系到最終應用的測量視場(FOV)。這是因為相機需要聚焦在特定的距離上標定。改變焦距長度會輕微地影響對焦距離,這會影響之前的標定
2023-01-17 15:13:59598 此方法采用一塊大標定板來統一各個相機的坐標,每個大標定板中有若干小標定板,各個小標定板間的位置關系都是已知的,各個相機都能拍攝到一個小標定板。通過各個小標定板可以標定每個相機的內部參數和外部參數,每個相機的坐標都可以轉換到各個小標定板的坐標系上,從而統一各個相機的坐標。
2023-03-13 10:06:371506 由于OpenCV中cvStereoCalibrate總是會得到很夸張的結果(見下文5.1問題描述),所以最后還是決定用Bouguet的Matlab標定工具箱立體標定,再將標定的結果讀入OpenCV,來進行后續圖像校準和匹配。
2023-03-21 10:17:28714 該數據集包括了不同仿真環境下生成的合成數據,以及不同場景下由各類真實相機采集到的圖像和視頻序列。每一個數據樣本均提供了準確的標定結果、相機參數、或視覺線索。
2023-04-10 10:45:38212 機械手搭載雙目相機,手眼標定。
2023-04-20 16:32:43858 相機標定是通過輸入帶有標定patter的標定板來獲得相機參數的一個過程。實際的光學成像是一套非常復雜的過程,從三維世界投影到相機中的二維圖像。相機標定就是用抽象的數學模型來表示這個復雜的成像過程。
2023-06-01 14:36:46430 
標定板的選擇主要從四個方面入手,分別是精度、視場、材質、光源,下面分別敘述。
2022-09-24 16:42:491262 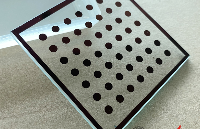
相機標定是計算機視覺最基礎也是至關重要的一個問題,標定的精度夠不夠決定了以后的校正、去畸變、配準、計算三維坐標、恢復三維模型能否進一步做下去。
2023-06-26 09:51:30312 首先,課程介紹了雙目相機標定的基礎知識。我了解到雙目相機是由兩個相機組成的系統,通過同時拍攝目標物體的兩個視角來獲取三維信息。
2023-07-03 14:25:061916 
在實際控制中,相機檢測到目標在圖像中的像素位置后,通過標定好的坐標轉換矩陣將相機的像素坐標變換到機械手的空間坐標系中,然后根據機械手坐標系計算出各個電機該如何運動,從而控制機械手到達指定位置。這個過程中涉及到了圖像標定,圖像處理,運動學正逆解,手眼標定等。
2023-07-03 15:45:152284 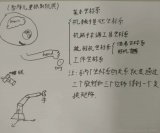
機械手搭載雙目相機,手眼標定。
2023-07-11 11:18:21831 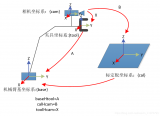
在大多數條件下,這些參數必須通過實驗與計算才能得到。無論是在圖像測量或者機器視覺應用中,相機參數的標定都是非常關鍵的環節,其標定結果的精度及算法的穩定性直接影響相機工作產生結果的準確性。
2023-08-03 09:38:04830 
張正友標定方法是一種經典的相機標定方法,目前是最受歡迎的方法之一。該方法通過一種機器學習的方法,利用大量匹配的數據點像素坐標、世界坐標,基于極大似然估計擬合得到一個最優解。
2023-08-03 10:59:12641 
對于攝像機標定問題已提出了很多方法,攝像機標定的理論問題已得到較好的解決,對攝像機標定的研究來說,當前的研究工作應該集中在如何針對具體的實際應用問題,采用特定的簡便、實用、快速、準確的標定方法。
2023-08-04 12:54:171386 
機器人標定技術是提高機器人末端絕對定位精度的重要方法。可分為三個層次:一是關節級標定,二是機器人運動學標定,三是機器人動力學標定。
2023-09-15 09:49:521223 
選中Export Camera Parameters按鈕,將計算得到的相關參數導入到Matlab中;若要進行更精確的標定,可在標定時考慮畸變誤差或采用雙目相機標定方法。
2023-10-09 10:51:50505 
本文提出了一種自動在線激光雷達相機自標定方法CFNet。CFNet是全自動的,不需要特定的校準場景、校準目標和初始校準參數。我們定義一個校準流來表示初始投影點的位置與地面真值之間的偏差。
2023-10-10 11:44:43340 
這個逼近的過程就是「相機標定」,我們用簡單的數學模型來表達復雜的成像過程,并且求出成像的反過程。標定之后的相機,可以進行三維場景的重建,即深度的感知,這是計算機視覺的一大分支。
2023-10-18 17:00:07474 
在選擇標定板時,一個重要的考慮因素是它的物理尺寸。這最終關系到最終應用的測量視場(FOV)。這是因為相機需要聚焦在特定的距離上標定。改變焦距長度會輕微地影響對焦距離,這會影響之前的標定。即使是光圈的改變通常也會對標定的有效性產生負面影響,這就是為什么要避免改動它們。
2023-11-25 14:36:08414 
包含了計算相機內參,獲得標定數據,優化計算外參和雷達相機融合應用相關的代碼。 本方案中使用了標定板角點作為標定目標物,由于Livox雷達非重復性掃描的特點,點云的密度較大,比較易于找到雷達點云中
2023-11-28 11:09:12209 
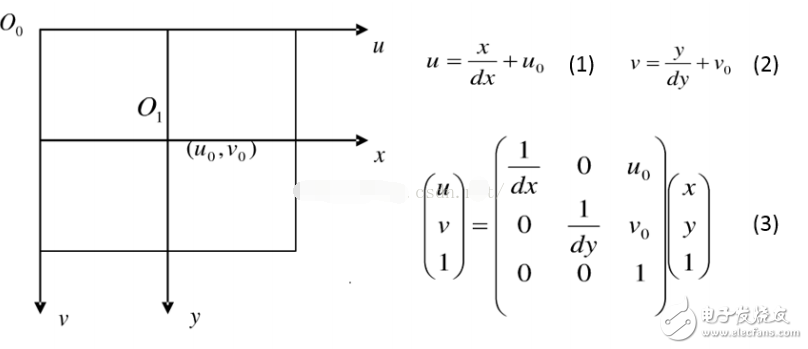
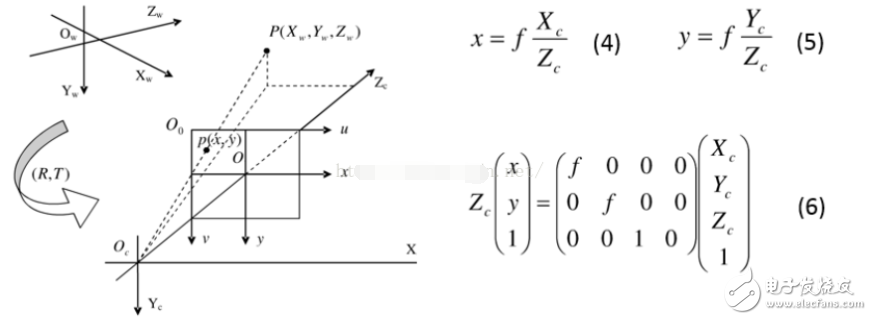
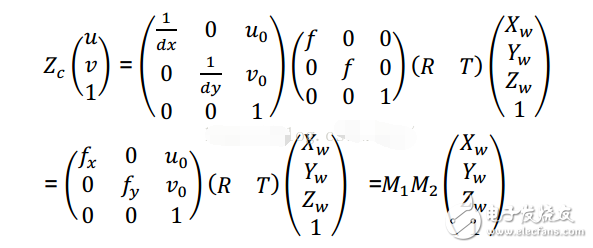
相機標定中的基本坐標系有:像素坐標系、圖像坐標系、相機坐標系、世界坐標系,這些坐標系之間都有一定的轉換關系,若這些轉換關系已知,就可以得到世界坐標(棋盤上的點)和像素坐標之間的關系。
2023-12-19 10:42:49209 
該標定過程僅需10分鐘,能夠自動完成所有校準步驟,無需人工干預。通過該標定解決方案,相機模組能夠實現亞像素級別的精度和穩定性。
2023-12-19 15:14:47403
 電子發燒友App
電子發燒友App










 工商網監
工商網監
評論