 電子發燒友App
電子發燒友App


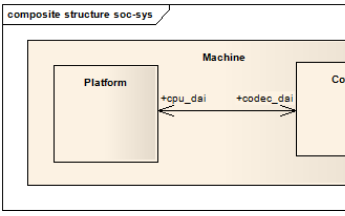
Control接口
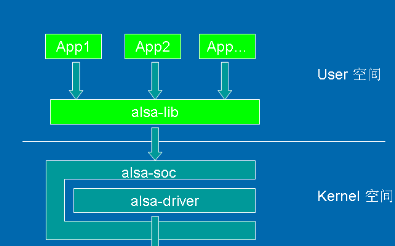
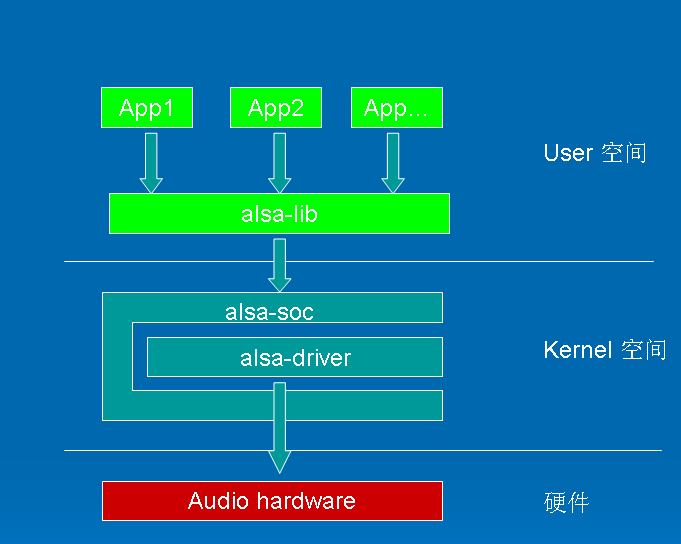
Control接口主要讓用戶空間的應用程序(alsa-lib)可以訪問和控制音頻codec芯片中的多路開關,滑動控件等。對于Mixer(混音)來說,Control接口顯得尤為重要,從ALSA 0.9.x版本開始,所有的mixer工作都是通過control接口的API來實現的。
ALSA已經為AC97定義了完整的控制接口模型,如果你的Codec芯片只支持AC97接口,你可以不用關心本節的內容。
定義了所有的Control API。如果你要為你的codec實現自己的controls,請在代碼中包含該頭文件。
Controls的定義?
要自定義一個Control,我們首先要定義3各回調函數:info,get和put。然后,定義一個snd_kcontrol_new結構:
[c-sharp]?view plain?copy
static?struct?snd_kcontrol_new?my_control?__devinitdata?=?{??
.iface?=?SNDRV_CTL_ELEM_IFACE_MIXER,??
.name?=?"PCM?Playback?Switch",??
.index?=?0,??
.access?=?SNDRV_CTL_ELEM_ACCESS_READWRITE,??
.private_value?=?0xffff,??
.info?=?my_control_info,??
.get?=?my_control_get,??
.put?=?my_control_put??
};??
iface字段指出了control的類型,alsa定義了幾種類型(SNDDRV_CTL_ELEM_IFACE_XXX),常用的類型是MIXER,當然也可以定義屬于全局的CARD類型,也可以定義屬于某類設備的類型,例如HWDEP,PCMRAWMIDI,TIMER等,這時需要在device和subdevice字段中指出卡的設備邏輯編號。
name字段是該control的名字,從ALSA 0.9.x開始,control的名字是變得比較重要,因為control的作用是按名字來歸類的。ALSA已經預定義了一些control的名字,我們再Control Name一節詳細討論。
index字段用于保存該control的在該卡中的編號。如果聲卡中有不止一個codec,每個codec中有相同名字的control,這時我們可以通過index來區分這些controls。當index為0時,則可以忽略這種區分策略。
access字段包含了該control的訪問類型。每一個bit代表一種訪問類型,這些訪問類型可以多個“或”運算組合在一起。
private_value字段包含了一個任意的長整數類型值。該值可以通過info,get,put這幾個回調函數訪問。你可以自己決定如何使用該字段,例如可以把它拆分成多個位域,又或者是一個指針,指向某一個數據結構。
tlv字段為該control提供元數據。
Control的名字
control的名字需要遵循一些標準,通常可以分成3部分來定義control的名字:源--方向--功能。
源,可以理解為該control的輸入端,alsa已經預定義了一些常用的源,例如:Master,PCM,CD,Line等等。?
方向,代表該control的數據流向,例如:Playback,Capture,Bypass,Bypass Capture等等,也可以不定義方向,這時表示該Control是雙向的(playback和capture)。?
功能,根據control的功能,可以是以下字符串:Switch,Volume,Route等等。
也有一些命名上的特例:
全局的capture和playback??? "Capture Source","Capture Volume","Capture Switch",它們用于全局的capture source,switch和volume。同理,"Playback Volume","Playback Switch",它們用于全局的輸出switch和volume。
Tone-controles??? 音調控制的開關和音量命名為:Tone Control - XXX,例如,"Tone Control - Switch","Tone Control - Bass","Tone Control - Center"。
3D controls??? 3D控件的命名規則:,"3D Control - Switch","3D Control - Center","3D Control - Space"。
Mic boost??? 麥克風音量加強控件命名為:"Mic Boost"或"Mic Boost(6dB)"。
訪問標志(ACCESS Flags)
Access字段是一個bitmask,它保存了改control的訪問類型。默認的訪問類型是:SNDDRV_CTL_ELEM_ACCESS_READWRITE,表明該control支持讀和寫操作。如果access字段沒有定義(.access==0),此時也認為是READWRITE類型。
如果是一個只讀control,access應該設置為:SNDDRV_CTL_ELEM_ACCESS_READ,這時,我們不必定義put回調函數。類似地,如果是只寫control,access應該設置為:SNDDRV_CTL_ELEM_ACCESS_WRITE,這時,我們不必定義get回調函數。
如果control的值會頻繁地改變(例如:電平表),我們可以使用VOLATILE類型,這意味著該control會在沒有通知的情況下改變,應用程序應該定時地查詢該control的值。
回調函數
info回調函數
info回調函數用于獲取control的詳細信息。它的主要工作就是填充通過參數傳入的snd_ctl_elem_info對象,以下例子是一個具有單個元素的boolean型control的info回調:
[c-sharp]?view plain?copy
static?int?snd_myctl_mono_info(struct?snd_kcontrol?*kcontrol,??
struct?snd_ctl_elem_info?*uinfo)??
{??
uinfo->type?=?SNDRV_CTL_ELEM_TYPE_BOOLEAN;??
uinfo->count?=?1;??
uinfo->value.integer.min?=?0;??
uinfo->value.integer.max?=?1;??
return?0;??
}??
type字段指出該control的值類型,值類型可以是BOOLEAN, INTEGER, ENUMERATED, BYTES,IEC958和INTEGER64之一。count字段指出了改control中包含有多少個元素單元,比如,立體聲的音量control左右兩個聲道的音量值,它的count字段等于2。value字段是一個聯合體(union),value的內容和control的類型有關。其中,boolean和integer類型是相同的。
ENUMERATED類型有些特殊。它的value需要設定一個字符串和字符串的索引,請看以下例子:
[c-sharp]?view plain?copy
static?int?snd_myctl_enum_info(struct?snd_kcontrol?*kcontrol,??
struct?snd_ctl_elem_info?*uinfo)??
{??
static?char?*texts[4]?=?{??
"First",?"Second",?"Third",?"Fourth"??
};??
uinfo->type?=?SNDRV_CTL_ELEM_TYPE_ENUMERATED;??
uinfo->count?=?1;??
uinfo->value.enumerated.items?=?4;??
if?(uinfo->value.enumerated.item?>?3)??
uinfo->value.enumerated.item?=?3;??
strcpy(uinfo->value.enumerated.name,??
texts[uinfo->value.enumerated.item]);??
return?0;??
}??
alsa已經為我們實現了一些通用的info回調函數,例如:snd_ctl_boolean_mono_info(),snd_ctl_boolean_stereo_info()等等。
get回調函數
該回調函數用于讀取control的當前值,并返回給用戶空間的應用程序。
[c-sharp]?view plain?copy
static?int?snd_myctl_get(struct?snd_kcontrol?*kcontrol,??
struct?snd_ctl_elem_value?*ucontrol)??
{??
struct?mychip?*chip?=?snd_kcontrol_chip(kcontrol);??
ucontrol->value.integer.value[0]?=?get_some_value(chip);??
return?0;??
}??
value字段的賦值依賴于control的類型(如同info回調)。很多聲卡的驅動利用它存儲硬件寄存器的地址、bit-shift和bit-mask,這時,private_value字段可以按以下例子進行設置:
.private_value = reg | (shift << 16) | (mask << 24);
然后,get回調函數可以這樣實現:
static int snd_sbmixer_get_single(struct snd_kcontrol *kcontrol,
??? struct snd_ctl_elem_value *ucontrol)
{
??? int reg = kcontrol->private_value & 0xff;
??? int shift = (kcontrol->private_value >> 16) & 0xff;
??? int mask = (kcontrol->private_value >> 24) & 0xff;
??? ....
//根據以上的值讀取相應寄存器的值并填入value中
}
如果control的count字段大于1,表示control有多個元素單元,get回調函數也應該為value填充多個數值。
put回調函數
put回調函數用于把應用程序的控制值設置到control中。
[c-sharp]?view plain?copy
static?int?snd_myctl_put(struct?snd_kcontrol?*kcontrol,??
struct?snd_ctl_elem_value?*ucontrol)??
{??
struct?mychip?*chip?=?snd_kcontrol_chip(kcontrol);??
int?changed?=?0;??
if?(chip->current_value?!=??
ucontrol->value.integer.value[0])?{??
change_current_value(chip,??
ucontrol->value.integer.value[0]);??
changed?=?1;??
}??
return?changed;??
}??
如上述例子所示,當control的值被改變時,put回調必須要返回1,如果值沒有被改變,則返回0。如果發生了錯誤,則返回一個負數的錯誤號。
和get回調一樣,當control的count大于1時,put回調也要處理多個control中的元素值。
創建Controls
當把以上討論的內容都準備好了以后,我們就可以創建我們自己的control了。alsa-driver為我們提供了兩個用于創建control的API:
snd_ctl_new1()
snd_ctl_add()
我們可以用以下最簡單的方式創建control:
[c-sharp]?view plain?copy
err?=?snd_ctl_add(card,?snd_ctl_new1(&my_control,?chip));??
if?(err?
return?err;??
在這里,my_control是一個之前定義好的snd_kcontrol_new對象,chip對象將會被賦值在kcontrol->private_data字段,該字段可以在回調函數中訪問。
snd_ctl_new1()會分配一個新的snd_kcontrol實例,并把my_control中相應的值復制到該實例中,所以,在定義my_control時,通常我們可以加上__devinitdata前綴。snd_ctl_add則把該control綁定到聲卡對象card當中。
元數據(Metadata)
很多mixer control需要提供以dB為單位的信息,我們可以使用DECLARE_TLV_xxx宏來定義一些包含這種信息的變量,然后把control的tlv.p字段指向這些變量,最后,在access字段中加上SNDRV_CTL_ELEM_ACCESS_TLV_READ標志,就像這樣:
static DECLARE_TLV_DB_SCALE(db_scale_my_control, -4050, 150, 0);
static struct snd_kcontrol_new my_control __devinitdata = {
??? ...
??? .access = SNDRV_CTL_ELEM_ACCESS_READWRITE |
??????????? SNDRV_CTL_ELEM_ACCESS_TLV_READ,
??? ...
??? .tlv.p = db_scale_my_control,
};
DECLARE_TLV_DB_SCALE宏定義的mixer control,它所代表的值按一個固定的dB值的步長變化。該宏的第一個參數是要定義變量的名字,第二個參數是最小值,以0.01dB為單位。第三個參數是變化的步長,也是以0.01dB為單位。如果該control處于最小值時會做出mute時,需要把第四個參數設為1。
DECLARE_TLV_DB_LINEAR宏定義的mixer control,它的輸出隨值的變化而線性變化。?該宏的第一個參數是要定義變量的名字,第二個參數是最小值,以0.01dB為單位。第二個參數是最大值,以0.01dB為單位。如果該control處于最小值時會做出mute時,需要把第二個參數設為TLV_DB_GAIN_MUTE。
這兩個宏實際上就是定義一個整形數組,所謂tlv,就是Type-Lenght-Value的意思,數組的第0各元素代表數據的類型,第1個元素代表數據的長度,第三個元素和之后的元素保存該變量的數據。
Control設備的建立
Control設備和PCM設備一樣,都屬于聲卡下的邏輯設備。用戶空間的應用程序通過alsa-lib訪問該Control設備,讀取或控制control的控制狀態,從而達到控制音頻Codec進行各種Mixer等控制操作。
Control設備的創建過程大體上和PCM設備的創建過程相同。詳細的創建過程可以參考本博的另一篇文章:Linux音頻驅動之三:PCM設備的創建。下面我們只討論有區別的地方。
我們需要在我們的驅動程序初始化時主動調用snd_pcm_new()函數創建pcm設備,而control設備則在snd_card_create()內被創建,snd_card_create()通過調用snd_ctl_create()函數創建control設備節點。所以我們無需顯式地創建control設備,只要建立聲卡,control設備被自動地創建。
和pcm設備一樣,control設備的名字遵循一定的規則:controlCxx,這里的xx代表聲卡的編號。我們也可以通過代碼正是這一點,下面的是snd_ctl_dev_register()函數的代碼:
[c-sharp]?view plain?copy
/*?
*?registration?of?the?control?device?
*/??
static?int?snd_ctl_dev_register(struct?snd_device?*device)??
{??
struct?snd_card?*card?=?device->device_data;??
int?err,?cardnum;??
char?name[16];??
if?(snd_BUG_ON(!card))??
return?-ENXIO;??
cardnum?=?card->number;??
if?(snd_BUG_ON(cardnum?=?SNDRV_CARDS))??
return?-ENXIO;??
/*?control設備的名字?*/??
sprintf(name,?"controlC%i",?cardnum);??
if?((err?=?snd_register_device(SNDRV_DEVICE_TYPE_CONTROL,?card,?-1,??
&snd_ctl_f_ops,?card,?name))?
return?err;??
return?0;??
}??
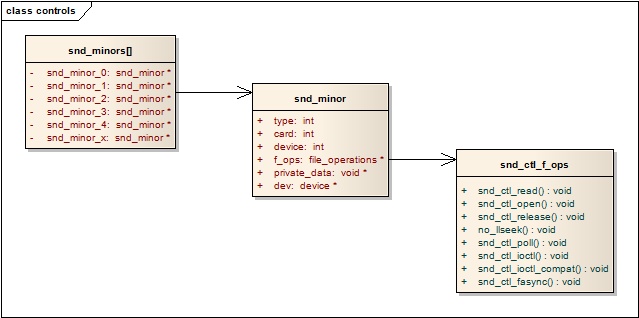
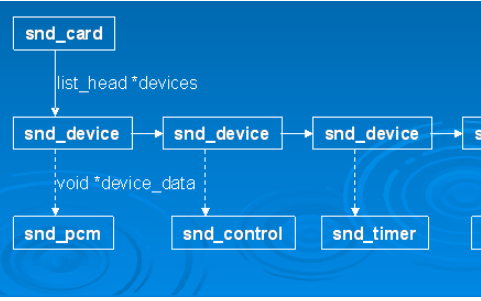
snd_ctl_dev_register()函數會在snd_card_register()中,即聲卡的注冊階段被調用。注冊完成后,control設備的相關信息被保存在snd_minors[]數組中,用control設備的此設備號作索引,即可在snd_minors[]數組中找出相關的信息。注冊完成后的數據結構關系可以用下圖進行表述:
control設備的操作函數入口
用戶程序需要打開control設備時,驅動程序通過snd_minors[]全局數組和此設備號,可以獲得snd_ctl_f_ops結構中的各個回調函數,然后通過這些回調函數訪問control中的信息和數據(最終會調用control的幾個回調函數get,put,info)。詳細的代碼我就不貼了,大家可以讀一下代碼:/sound/core/control.c。
?











 工商網監
工商網監
評論