") 哈佛大學開發(fā)出史上最輕的自主飛行機器人!
哈佛大學開發(fā)出史上最輕的自主飛行機器人!
今天,Nature封面發(fā)表一項重磅研究:哈佛大學開發(fā)出史上最輕的自主飛行機器人!這個蜜蜂機器人僅259毫克,只需太陽能供電就能實現(xiàn)持續(xù)、不受束縛的飛行!
早在達芬奇的時代,飛行的動物就激發(fā)了人類的探索精神,人們一直試圖模仿自然界中的飛行動物,制造出能夠扇動翅膀飛起來的機器。
在今天Nature雜志的封面文章中,由Robert J. Wood教授領(lǐng)導的哈佛大學微機器人實驗室的研究人員展示了他們模擬昆蟲制造的飛行機器人,這是一個四翼的蜜蜂機器人,他們稱之為RoboBee X-Wing。
研究人員聲稱,這是迄今為止最輕的昆蟲飛行器,它使用太陽能電池,只要有光源就能持續(xù)、不受束縛地飛行。
這個受昆蟲啟發(fā)的機器人是有史以來最輕的飛行器,可以在無需電源栓繩的情況下實現(xiàn)持續(xù)飛行。
RoboBee X-Wing重259毫克,比回形針還輕,翼展約3.5厘米。
它由重量約為10毫克的微型太陽能電池供電,與點亮一串LED圣誕燈串上的一個燈泡相比,驅(qū)動一個RoboBee所需的能量更少。
與以往的微型飛行機器人相比,這個RoboBee具有更好的傳動比,改進的執(zhí)行器,以及一對額外的機翼。
這些改進使得這個微型機器人有足夠的升力,能夠攜帶6塊太陽能電池和機載電子設(shè)備。
研究人員表示,這個不受束縛的機器人蜜蜂可以用于環(huán)境探索、搜索和救援任務(wù),等等。
有4個翅膀的蜜蜂機器人:259毫克,太陽能供電
以前的蜜蜂機器人通常被設(shè)計得非常像蜜蜂,有兩個跟蜜蜂翅膀差不多大的撲翼。畢竟,蜜蜂用兩只翅膀就可以做很多事情,那么為什么機器人不能呢?
事實證明,有翅膀的微型機器人之所以不能完成蜜蜂能做的事情,原因有很多,比如偏航控制問題就已被證明很棘手。這也是為什么使用四個翅膀而不是兩個翅膀這種不那么類似蜜蜂的設(shè)計很吸引人的原因之一。
此外,撲翼機器人與固定翼無人機和四旋翼直升機相比,還有一些潛在的優(yōu)勢。拍動翅膀使動物和機器高度靈活和機動——例如,蝙蝠可以輕松地飛過地下室、洞穴和茂密的森林。此外,扇動的翅膀通常比螺旋槳的葉尖速度要慢,因此更安靜,如果它們撞到人,造成的傷害也更小。
實現(xiàn)昆蟲大小的飛行機器人有3個具體的挑戰(zhàn)。
首先,用于制造機器人的材料必須既堅固又輕盈。
其次,人類設(shè)計的致動器(將能量轉(zhuǎn)化為運動的裝置)和電池還遠未實現(xiàn)生物組織的功率和能量密度。
第三,動物通常用來保持穩(wěn)定飛行和操縱的傳感和控制算法復雜得令人難以置信。即使使用超級計算機,也很難模擬動物飛行的算法,盡管一個典型的昆蟲大腦只有大約100萬個神經(jīng)元——這比超級計算機處理系統(tǒng)中的組件數(shù)量少了一個數(shù)量級。
當然,Jafferis團隊的工作并不是第一個能自主飛行的撲翼機器人昆蟲。去年在ICRA,華盛頓大學的一個小組就展示了一個雙翼機器人,當激光對準它的太陽能電池時,它就能起飛。不過哈佛大學的機器人蜜蜂不止是能“起飛”,而且能在空中持續(xù)飛行。
RoboBee X-Wing機器人的結(jié)構(gòu)如下圖所示。持續(xù)飛行要求要有持續(xù)供能、而且輕量的電源。以前的昆蟲機器人,有線的電源顯然不行。
RoboBee X-Wing。只有幾厘米大小的飛行器,通過扇動翅膀飛行。提供動力的太陽能電池板安裝在機翼系統(tǒng)上方;電子設(shè)備則安裝在機翼下方。
作者巧妙地避開了有線電源的問題,而是在機器人蜂頂部安裝太陽能電池板。在高強度光源照明下,太陽能板能提供大約120毫瓦電能,足以驅(qū)動這個只有259毫克的飛行系統(tǒng)。
太陽能電池板,包含6塊約5mm邊長的太陽能電池
RoboBee的核心是一個由復合材料制成的撲翼系統(tǒng),采用激光加工技術(shù)。這是該研究團隊的一個特點,他們屬于哈佛微型機器人實驗室的一個研究小組。該小組開發(fā)了一種設(shè)計和制造工具,并且已經(jīng)開發(fā)得相當成熟,成為制造小型機器人的寶貴(和令人羨慕的)資源。
撲翼系統(tǒng)
目前他們設(shè)計的撲翼系統(tǒng)采用了創(chuàng)新的四翼結(jié)構(gòu),前后擺動。這種運動是由集成壓電材料(將電轉(zhuǎn)化為機械力的材料)驅(qū)動,并產(chǎn)生足夠的升力和可接受的功率需求。
懸掛在機翼系統(tǒng)下方的電子設(shè)備
壓電材料的一個缺陷是,盡管它們可以對材料施加相當大的力,但它們會引起微小的位移,并且需要高電壓。當前工作的關(guān)鍵進步是優(yōu)化了機械傳動,從而能夠產(chǎn)生適當?shù)牧Γ㈤_發(fā)了一個輕量級的電子電路,將太陽能電池板產(chǎn)生的低電壓轉(zhuǎn)換成壓電材料所需要的200伏特的脈沖功率。
所有這些部件組合在一起,最終形成了這個又高又瘦的飛行機器蜜蜂,它的太陽能電池板高掛在機翼系統(tǒng)上方,電子設(shè)備懸掛在機翼下方。
它當然不是最美觀的飛行器,但當燈一亮,它就會升空,并實現(xiàn)持續(xù)、自主、不受束縛的飛行。
下面,我們分別介紹蜜蜂機器人的電池、機翼和電子電路板三大核心組件。
為什么是四個翅膀?蜜蜂機器人三大核心組件解析
近年來,人們對開發(fā)“亞克級”(sub-gram)飛行器產(chǎn)生了濃厚的興趣,人們普遍預計這類自主飛行器的機動性很高,可廣泛用于環(huán)境監(jiān)測、密閉空間內(nèi)導航等應(yīng)用。然而,隨著毫米級飛行器(MAV)的尺寸越來越小,需要采用與此前不同的致動策略,以及基于撓曲的內(nèi)部結(jié)構(gòu),以克服極小尺寸帶來的諸多限制。尺寸問題降低了電磁電動機性能,并增加了傳統(tǒng)軸承摩擦帶來的損失。
在毫米級的飛行器中,通常選擇壓電作為致動來源,因為它們的功率密度標度為L^-1(其中L是致動器長度),且致動器的振蕩操作可以與機翼的期望運動良好匹配。制造和組裝技術(shù)的進步進一步增加了在微型機器人系統(tǒng)應(yīng)用的穩(wěn)健性。不過,這種飛行器飛行必須依賴外部電源和控制系統(tǒng)。
在本文中,我們在“昆蟲級”飛行器內(nèi)部集成了超低重量的電源和信號發(fā)生器(圖1a),以實現(xiàn)持續(xù)的無附件飛行(圖1b)。我們將這款飛行器命名為RoboBee XWing(圖2a)。
圖1:RoboBee XWing飛行器及其性能。a,飛行器質(zhì)量僅90毫克,有四個機翼,翼展3.5厘米。太陽能電池位于車輛上方3厘米處,以防止與機翼的空氣動力學干擾。驅(qū)動電子裝置定位使質(zhì)心和壓力中心對齊。整個集成系統(tǒng)重259毫克,高6.5厘米。b,飛行器在無附件飛行期間按設(shè)定拍攝視頻。光源在機架外部正上方提供大約三倍于太陽的光強度。連接到太陽能電池陣列的Kevlar線的作用是確保飛行安全。
圖2 | 飛行器的設(shè)計。a,RoboBee XWing。b,氧化鋁橋壓電致動器(PZT為壓電換能器)。c,飛行器的特寫俯視圖中可以看到每個致動器與兩個機翼的連接機構(gòu)(左側(cè),用于圖a中的飛行器)與每個致動器連接一個機翼的結(jié)構(gòu)(右側(cè),用于以前的飛行器)對比。圖中黃色部分是將兩個機翼固定到變速器上的適配器。此外還顯示出傳動比T和機翼運動行程的旋轉(zhuǎn)中心。d,在峰值升力操作條件下(210 V,165 Hz),機翼運動隨時間變化的空氣動力學示意圖。
考慮到飛行器的狀態(tài),驅(qū)動電子設(shè)備和電源的升力、重量,功率和效率,實現(xiàn)無附件飛行所需的光強度相當于5-7個太陽(1太陽≈1kW m?2),這個條件是無法實現(xiàn)的。我們采用新的設(shè)計方式解決了這個問題(圖2a)。首先是對致動器設(shè)計的改進(圖2b),降低傳動比(機翼行程角與致動器尖端偏轉(zhuǎn)的比率)讓升力峰值增加了38%(同時保持致動器尺寸不變)。
為了在不明顯增加功耗的情況下實現(xiàn)升力的顯著提升,可以通過降低機翼運動速率,增大機翼面積的方法來實現(xiàn),功率=力×速度。而增大機翼面積的最有效方法是增加更多的機翼(圖2c),四機翼飛行器能夠?qū)⑿侍岣叨噙_30%。
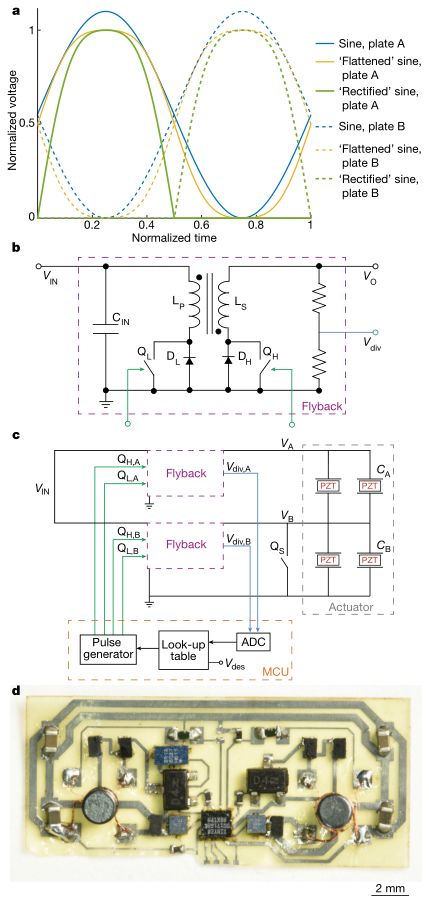
圖3:驅(qū)動電子電路。a,三個驅(qū)動波形會產(chǎn)生相同的機翼運動。b,雙向反激式轉(zhuǎn)換器電路圖。VIN是輸入電壓,CIN是輸入電容,QL是低位開關(guān),DL是低位二極管,LP為變壓器初級繞組,LS是變壓器次級繞組,QH是高位開關(guān), DH是高位二極管,VO是輸出電壓。c,完整電路圖,包括來自b(紫色)的兩個雙向反激轉(zhuǎn)換器,驅(qū)動兩個壓電晶片(標記為“致動器”)。微控制器單元(MCU)中的一個模數(shù)轉(zhuǎn)換器(ADC)(橙色)分別監(jiān)視板A(V A)或板B(V B)的輸出電壓。由一個查找表將結(jié)果與期望電壓V des進行比較,并對相應(yīng)的開關(guān)產(chǎn)生脈沖信號。d,c圖對應(yīng)的真實部件。
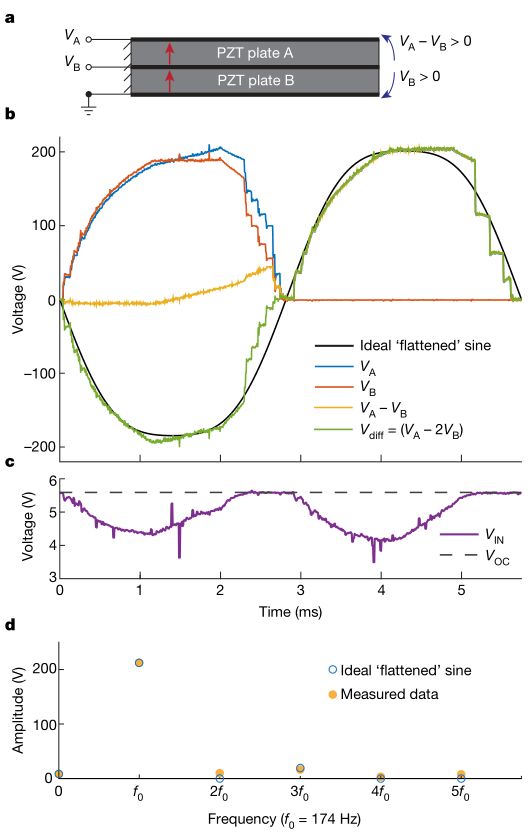
圖4 | 驅(qū)動電信號示意圖。a,致動器橫截面圖,表示了電壓命名,極化方向(紅色箭頭)和彎曲方向(藍色箭頭)。b,對飛行器施加的實測電壓。為了方便比較,我們繪制的是理想化的扁平正弦電壓信號(Vpp = 193 V,f = 174 Hz,加入8.4 V的電壓偏移以匹配數(shù)據(jù)。c,相應(yīng)的輸入電壓(V IN); V OC是光伏電池陣列的開路電壓。d,對實測數(shù)據(jù)(V diff)和理想化扁平正弦的前幾個諧波的振幅比較。
5-7個太陽才能起飛!未來優(yōu)化空間巨大
該設(shè)備本身是一個令人印象深刻的成就,同樣值得的矚目的是該團隊為系統(tǒng)進行的詳細描述的建模和設(shè)計。飛行機器蜜蜂不只是將各個部件結(jié)合在一起。它還反映了重量、電能、控制、力量、彈性甚至成本等各種因素達成的平衡。
還有很多工作要做,我們還沒有完全達到機器人群將飛上天空的地步。Jafferis和他同事的機器人需要強烈的光來產(chǎn)生足夠的能量才能起飛(至少是太陽強度的5-7倍),研究人員表示將來的工作是將電力需求降低到一個太陽的強度就能提供。
此外,這臺機器人飛行了沒一會就從視野中消失了,很可能是要迫降了。在 RoboBee X-Wing 真正實現(xiàn)自主飛行之前,還需要進行一些設(shè)計優(yōu)化等工作。
-
太陽能
+關(guān)注
關(guān)注
37文章
3432瀏覽量
114435 -
機器人
+關(guān)注
關(guān)注
211文章
28618瀏覽量
207926 -
神經(jīng)元
+關(guān)注
關(guān)注
1文章
363瀏覽量
18487
原文標題:Nature封面:哈佛打造史上最輕飛行機器人!自重僅259毫克
文章出處:【微信號:AI_era,微信公眾號:新智元】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論