 關于電機控制技術給機器人帶來的影響分析
關于電機控制技術給機器人帶來的影響分析
更妙的是,高級算法如PID(比例-積分-微分)校正算法或者FOC(磁場定向控制,有時也稱之為矢量控制)控制算法能被固化到電機控制器中去。這使得理想的電機操作和負載及負載變化相匹配,從而強化電機性能。這些算法可以考慮到如馬達慣性等相關因素,并且使電機驅動器適應由于機械因素如隙或其它來源導致的錯誤。利用這樣的算法使精確控制加速和扭矩曲線以及設置速度成為可能。
與有刷電機相比,無刷電機雖需更復雜的控制電路但卻可以表現出更優的性能。通常BLDC電機需要配備一個反饋傳感器,比如霍爾效應器件,光學編碼器,或者反電動勢檢測器件。(注意,通過獲取傳感反饋,傳統有刷電機也能達到高級控制的效果,但內部設計和機電問題還是會影響電機性能。)
另外一個無刷選擇是步進電機(圖4),此時用到開關的電磁鐵,電磁鐵安置在中間磁芯環旁。通常步進的角度范圍為大約1.8°(200步/轉)至30°(12步/轉),取決于永磁鐵的個數,這個范圍之外的值也是可以實現的。

圖4:步進電機中使用環繞在永久磁芯周圍的環形電磁極;通過改變這些電磁極的通電順序,電機可以產生轉動力。(圖片來源:Microchip Webinar)
通常來說步進電機并不轉;取而代之,是軸一步一步定向移動,繼而可被引導來轉動完整旋轉的一小部分,或者進行連續旋轉。如果通電卻沒有步進指向,它們會維持在原位置;步進電機能以低rpm提供高扭矩。讓步進電機轉動最直接的方法是有序通斷電磁鐵,但這可能會帶來抖動或振動。為了在某些不能容忍上述問題的情形下避免它們,一些高級的控制器支持了細分步進,此時繞組也按如此方式通電,這會使步進動作更加流暢,當然也比簡單的通斷控制更有持續性。
在無刷電機和步進電機的應用領域之間有重疊部分。步進電機更適合于需要精確的進退動作,如撿拾和安置的應用領域,而不是需要長時間持續轉動的領域,也適合于小的應用領域如不需要電機來提供高扭矩或速度的領域。另一方面,步進電機沒有無刷電機能效高。
還有許多其它的電機可供選擇。電機的系列很多并且復雜,有很多的分支。例如,永磁鐵同步電機(PMSM)是無刷電機(相對于轉子)和交流感應電機(相對于定子結構)的結合體。它顯示出了高能效、小體積中相對功率高、高扭矩重量比,快速響應時間還有相對容易控制等等特點,但價格相對也比較高。
控制需要技巧
一個電機自身,甚至加上基本的電機電流控制部分,并不能構成一個機器動作系統,機器動作系統的組成包含三個主要功能模塊(圖5):
1.實時控制器,表現為以下三種形式:一是作通常用途、運行著動作-控制固件的快速計算處理器;二是應用在控制方面、面向DSP的FPGA;三是帶硬連線和內置算法的專用控制器IC電路。
2.一個或多個級聯的驅動層,以把低層信號從控制器輸出中取出,然后輸出控制電子器件通斷所需要的高電壓/電流。
3.MOS管(或者其它開關器件如IGBT或者雙極型晶體管),其真正控制了流向電機繞組的電流。
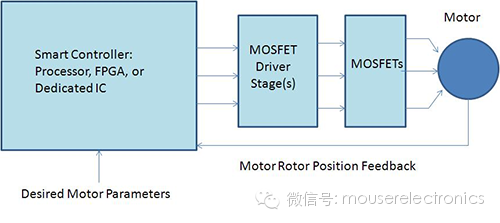
圖5:一個完整的電機控制鏈中包含用作算法執行和計算的智能控制器。控制器的輸出送到MOS管驅動級,繼而反過來控制電機的電源開關——MOS管;許多應用中也存在著一個反饋回路,可以提供機器人的實時位置信息,因而也能被用來改變速度和加速度。(來源:Bill Schweber)
選擇元器件時,具體MOS管的選取首要取決于電機和繞組所需的電流和電壓大小。盡管有成千上萬種MOS管可供挑選,最終的選擇往往由電機的這些額定值所決定(當然價格也是個很重要的考慮因素)。
一旦MOS管型號確定下來了,MOS管驅動器的選擇則由MOS管的額定值所決定;如果額定值很大,那可能需要一系列驅動組,取決于MOS管的尺寸。和MOS管本身的選擇一樣,驅動器的選擇很大程度上取決于通斷MOS需要多大的電壓和電流。(注意此時在“驅動器”這個術語上有模糊和重疊性,因此請仔細查閱數據手冊;一個“驅動器”可能指用來驅動MOS管的模塊,也可能指“驅動”電機線圈的MOS管。或者更進一步,在某些芯片上“驅動器”IC同時包含了MOS管和它們的驅動器。)
-
元器件
+關注
關注
112文章
4744瀏覽量
92687 -
機器人
+關注
關注
211文章
28618瀏覽量
207916 -
電機控制
+關注
關注
3539文章
1893瀏覽量
269116
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論