") 對(duì)駕駛行為的學(xué)習(xí)以及對(duì)其他車(chē)輛駕駛的預(yù)測(cè)
對(duì)駕駛行為的學(xué)習(xí)以及對(duì)其他車(chē)輛駕駛的預(yù)測(cè)
自動(dòng)駕駛里面很重要的就是估計(jì)和預(yù)測(cè)交通情況。預(yù)測(cè)的來(lái)源就是路上各種物體的姿態(tài)和速度歷史,高級(jí)的預(yù)測(cè)會(huì)包括可能的行動(dòng)軌跡。
對(duì)于車(chē)輛本身來(lái)說(shuō),其駕駛動(dòng)作分析離不開(kāi)動(dòng)力學(xué)理論(kinematic,dynamic),周?chē)恼系K物,同時(shí)還有道路行駛的路況(坡度,曲率)和規(guī)則(紅綠燈,限速牌,車(chē)道線,交叉路口等等)。所有這些因素組合一起就能體現(xiàn)交通參與者的行為模式,而學(xué)習(xí)這些行為模型就是自動(dòng)駕駛掌握老司機(jī)技術(shù)的必然之路。
一共兩件事,一是對(duì)其他車(chē)輛的駕駛行為預(yù)測(cè),二是司機(jī)駕駛行為建模以便學(xué)習(xí)模仿這種技術(shù)。在ADAS層次,基于錯(cuò)誤的駕駛操作危險(xiǎn)預(yù)測(cè),可以對(duì)司機(jī)的不良行為警告,這不是這里的討論范圍。
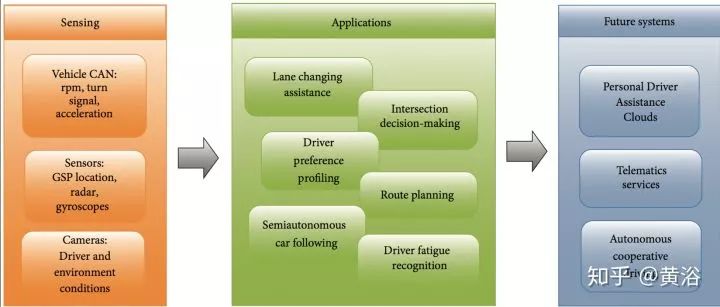
駕駛行為建模(DBM,driver behavior modeling)目的就是預(yù)測(cè)駕駛動(dòng)作,預(yù)測(cè)駕駛員心思,還有環(huán)境因素,如下圖所示:各種傳感器和車(chē)載控制器CAN數(shù)據(jù)作為輸入,預(yù)處理算法過(guò)濾數(shù)據(jù),然后給各種應(yīng)用提供預(yù)測(cè)模型。
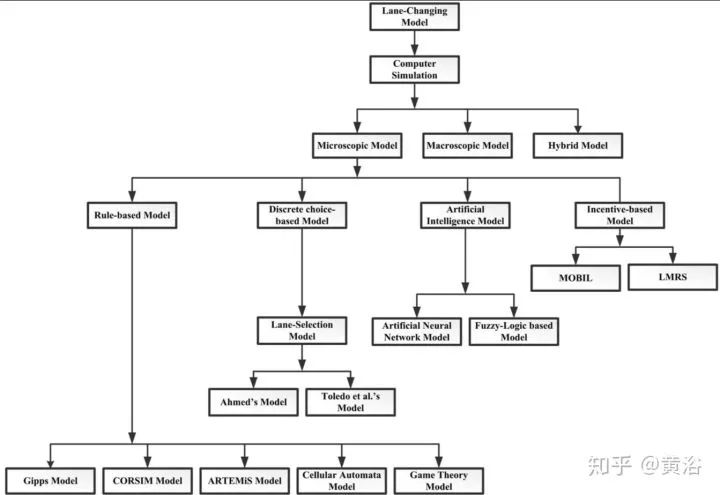
以換車(chē)道為例吧,建模方法可以分成微觀模型,宏觀模型(交通流)和二者混合模型。微觀模型又可以細(xì)分為基于規(guī)則模型,基于(概率)選擇模型,AI模型和基于激勵(lì)模型,見(jiàn)下圖。
這些微觀模型的各個(gè)方法在決策(decision),理由(reason),目標(biāo)車(chē)道選擇(target lane selection),可接受間距(gap),駕駛習(xí)慣(drivers variability)比如激進(jìn)或者溫和 (aggressive or mild)等方面有各自的特色,如下面表格的總結(jié)。
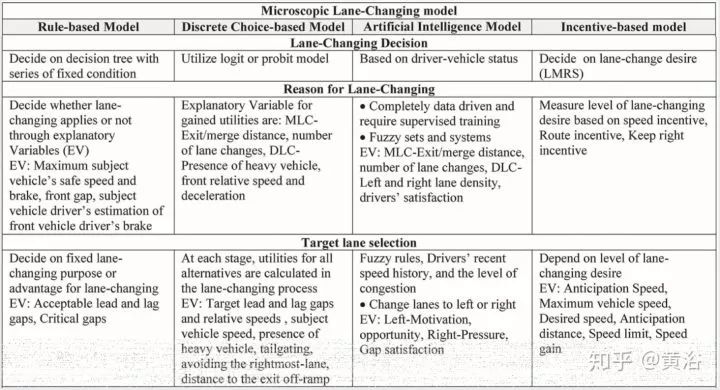
規(guī)則法主要是基于Gipps模型建立包含一系列固定條件的決策樹(shù),輸出是二值選擇;也有基于其他的,比如游戲理論的方法;
選擇法主要是采用概率模型,最大似然估計(jì)給出操作;
AI法需要車(chē)輛的行駛數(shù)據(jù)來(lái)訓(xùn)練NN模型;
激勵(lì)法會(huì)考慮車(chē)道的吸引度和風(fēng)險(xiǎn)安全標(biāo)準(zhǔn),也可以加入禮貌之類(lèi)的個(gè)性化因素。
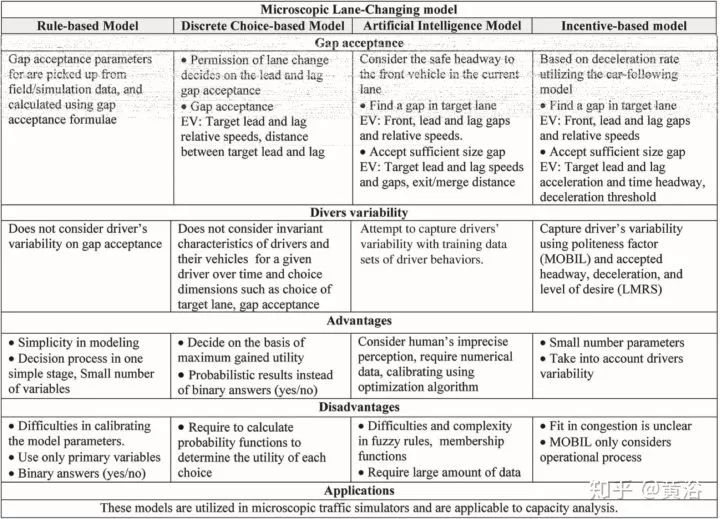
各自的優(yōu)缺點(diǎn)對(duì)比:
規(guī)則法建模簡(jiǎn)單,決策的變量少;難處是參數(shù)調(diào)節(jié),判決只能二值;
選擇法決定來(lái)自于其概率計(jì)算,獲取最大的益處;問(wèn)題是概率如何計(jì)算選擇的益處;
AI法是根據(jù)司機(jī)駕駛的數(shù)據(jù),優(yōu)化模型參數(shù);但數(shù)據(jù)量要求大,函數(shù)復(fù)雜度高;
激勵(lì)法參數(shù)少,有駕駛風(fēng)格選項(xiàng)可以考慮;但是交通擁擠的時(shí)候動(dòng)機(jī)不清楚。
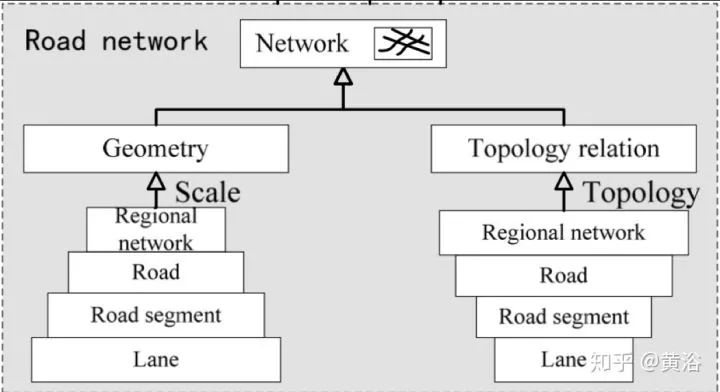
研究DBM,必然涉及道路網(wǎng)絡(luò)建模(RNM,road network modeling),即道路的拓?fù)浣Y(jié)構(gòu)。基本上,道路信息包括多個(gè)分級(jí)結(jié)構(gòu),如regional road network–road–road segment–carriageway–lane。
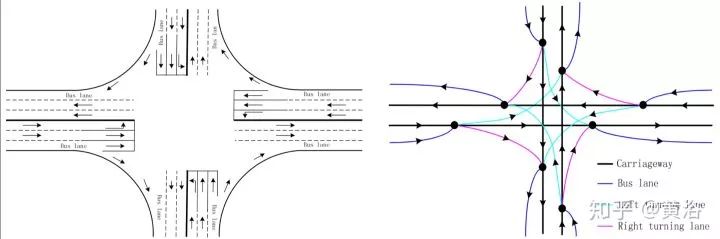
車(chē)道(Lane)是最基本的道路單位,而行車(chē)道(carriageway)是同一方向和類(lèi)似交通性質(zhì)的車(chē)道合并而成,如圖所示。

而這個(gè)是十字路口的行車(chē)道網(wǎng)絡(luò)結(jié)構(gòu)。
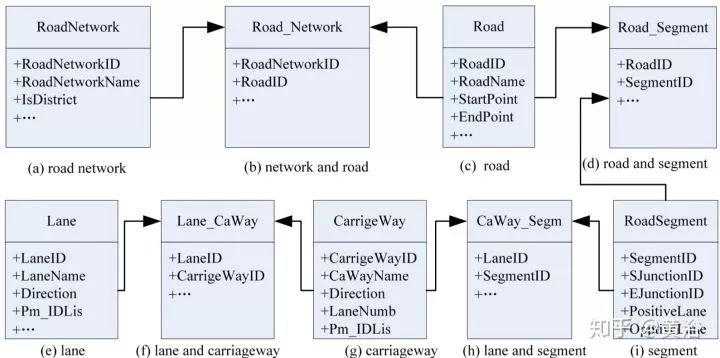
建立一個(gè)道路網(wǎng)絡(luò)和拓?fù)浣Y(jié)構(gòu)可以像下圖一樣。
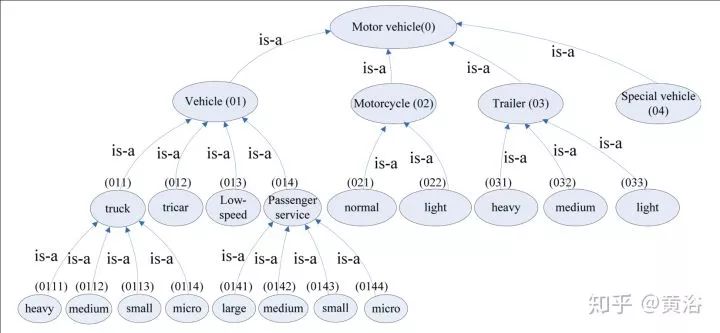
除了道路網(wǎng)絡(luò),DBM也需要考慮車(chē)輛模型,下圖是一個(gè)車(chē)輛種類(lèi)劃分的分級(jí)模型。
下面選幾篇論文分析一下做駕駛行為建模及其預(yù)測(cè)的研究工作。
這一篇文章是講述如何針對(duì)不同場(chǎng)景預(yù)測(cè)駕駛行為:“A Scenario-Adaptive Driving Behavior Prediction Approach to Urban Autonomous Driving“。
因?yàn)槌鞘薪煌▓?chǎng)景經(jīng)常變化,需要在駕駛行為預(yù)測(cè)時(shí)候考慮對(duì)場(chǎng)景的自適應(yīng)性。首先需要設(shè)計(jì)一個(gè)場(chǎng)景模型庫(kù),稱(chēng)為ontology,如下圖:包括兩個(gè)分支,一是Entity,二是Attribute;Entity包括4個(gè)部分:
MapEntity。它包括兩個(gè)部分,即AreaEntity和PointEntity。前者表示道路的一個(gè)區(qū)域,包括RoadPart,SideWalk,Junction,Segment和Lane。后者表示道路剩下的部分,包括TrafficSign,LaneMarker,StopLine。
ObstacleEntity。包括靜態(tài)和運(yùn)動(dòng)的。
EgoEntity。自身車(chē)的部分,VehicleType,EquippedSensors等等。
Environment。包括Weather,LightingConditions和RoadSurfaceConditions。
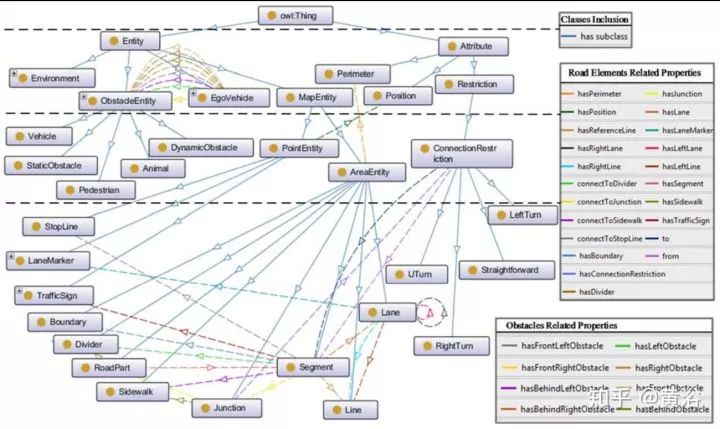
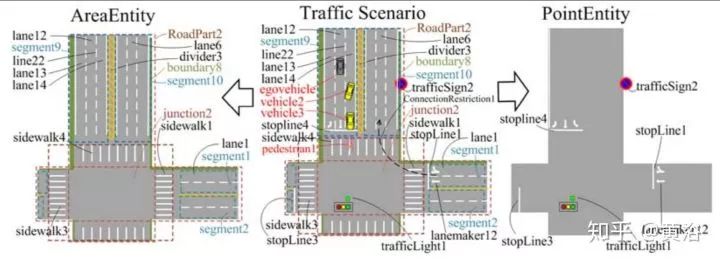
Attributes 描述位置,區(qū)域范圍和限制類(lèi)型。包括Position,Perimeter和ConnectedRestriction。下圖是一個(gè)道路基于此ontology的分解:
回頭看,該駕駛行為預(yù)測(cè)方法的系統(tǒng)框架如圖描述:存在兩個(gè)工作模式,在線和離線。
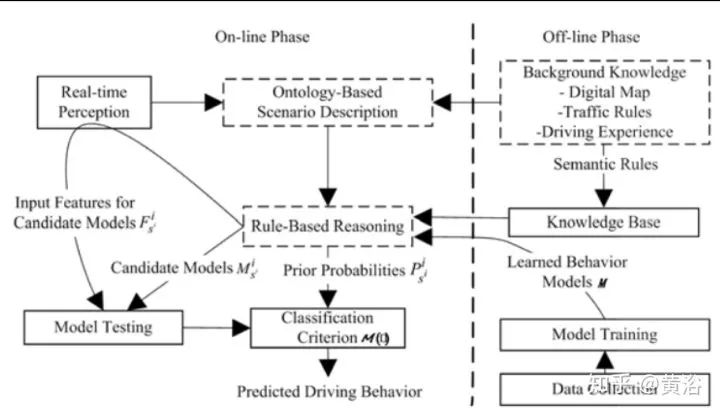
在離線模式,從數(shù)字地圖中提取道路信息,并根據(jù)上面的ontology模型進(jìn)行描述;先從典型的交通場(chǎng)景里提取數(shù)據(jù)用于學(xué)習(xí)駕駛行為的連續(xù)特征;每個(gè)駕駛模型通過(guò)一個(gè)HMM學(xué)習(xí);基于先驗(yàn)知識(shí)(交通規(guī)則,駕駛經(jīng)驗(yàn))定義候選行為模型,輸入特征,以及每個(gè)模型的先驗(yàn)知識(shí)概率,構(gòu)成語(yǔ)義規(guī)則;所有這些規(guī)則存于知識(shí)庫(kù)。
在線模式下,將知識(shí)庫(kù)的所有學(xué)習(xí)的模型和語(yǔ)義規(guī)則在初始化裝入內(nèi)存,然后每個(gè)候選行為模型會(huì)計(jì)算其似然值,結(jié)合先驗(yàn)概率得到行為標(biāo)簽(tag)。
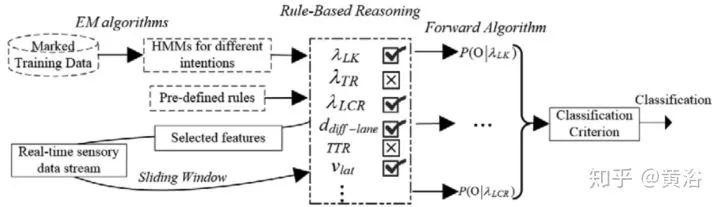
最后駕駛行為的預(yù)測(cè)方法如圖:對(duì)應(yīng)行為集合的一組HMM已經(jīng)離線學(xué)習(xí)完成,現(xiàn)在輸入實(shí)時(shí)的感知器數(shù)據(jù),那么對(duì)于每個(gè)車(chē)輛,基于規(guī)則的推理模塊會(huì)計(jì)算產(chǎn)生其候選模型,而HMM中的Forward算法就能估計(jì)每個(gè)所選模型的擬合程度,即最大后驗(yàn)估計(jì)。
這里給出一個(gè)實(shí)驗(yàn)例子:
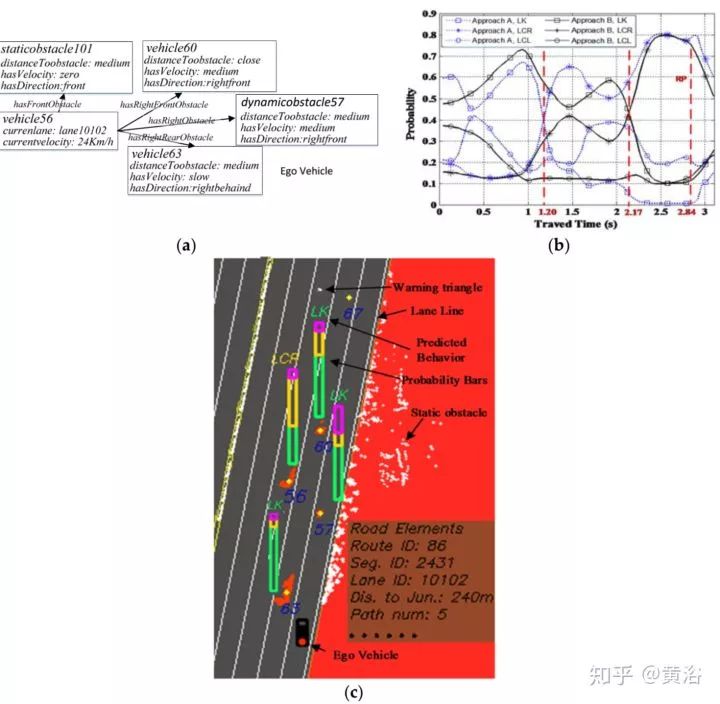
其中 (a) 是場(chǎng)景推理結(jié)果, (b) 不同行為似然值,(c) 駕駛行為預(yù)測(cè)界面。
北卡的駕駛行為預(yù)測(cè)的工作,兩篇論文:
第一篇是規(guī)劃算法AutonoVi,以支持滿(mǎn)足交通約束的無(wú)人駕駛動(dòng)態(tài)機(jī)動(dòng)(dynamic maneuvers):“AutonoVi: Autonomous Vehicle Planning with Dynamic Maneuvers and Traffic Constraints”。
其中機(jī)動(dòng)包括拐彎,換道和剎車(chē)等動(dòng)作,要求遵守各種交通規(guī)則(路口紅燈/stop牌停車(chē))和避撞(行人,車(chē)輛,自行車(chē))。下圖是算法流水線圖:

路徑規(guī)劃在前,按車(chē)道駕駛和交通生成一個(gè)引導(dǎo)軌跡,以及一串候選控制輸入(PID控制器)。這些控制會(huì)以數(shù)據(jù)驅(qū)動(dòng)的車(chē)輛動(dòng)力建模和控制障礙物理論(Control Obstacle)的無(wú)碰撞導(dǎo)航為標(biāo)準(zhǔn)評(píng)估,最后剩下的軌跡再通過(guò)優(yōu)化算法(Path,Comfort,Maneuver,Proximity等為開(kāi)銷(xiāo))決定最佳控制信號(hào)。
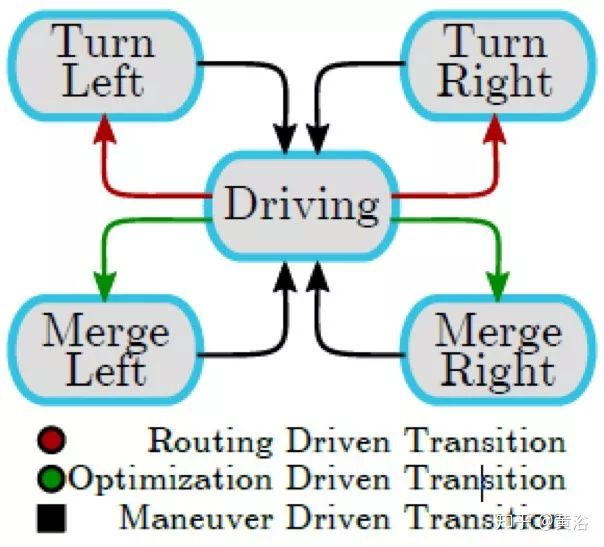
車(chē)輛的行為描述為有限狀態(tài)機(jī)(FSM),如下圖:
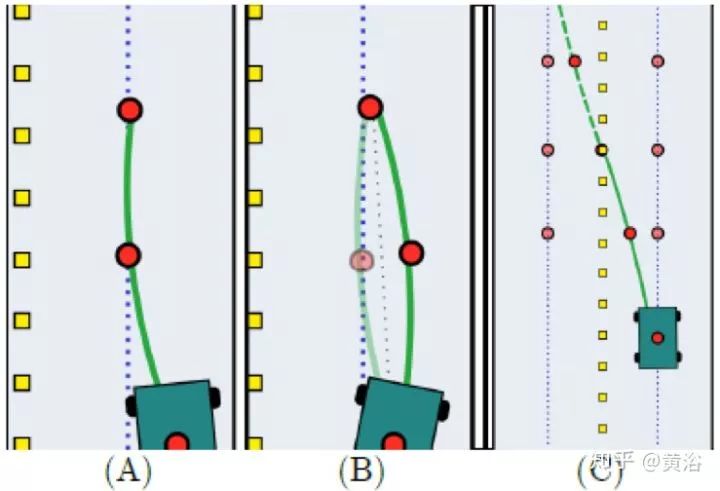
軌跡規(guī)劃要計(jì)算一組沿著車(chē)道中心等時(shí)間間隔的waypoints。如圖給出一個(gè)計(jì)算引導(dǎo)路徑的例子:(a)偏離中心被平滑引回;(b) 突然改變前進(jìn)方向;(c)換道,離開(kāi)和目標(biāo)車(chē)道的waypoints加權(quán)平均。
第二篇討論如何從車(chē)輛軌跡分析駕駛行為并用于自動(dòng)駕駛:"Identifying Driver Behaviors using Trajectory Features for Vehicle Navigation"。
算法的框架如圖:
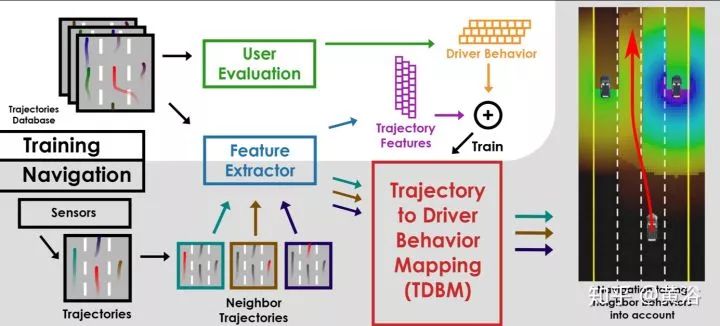
其中定義一個(gè)模塊叫Trajectory to Driver Behavior Mapping (TDBM),有6種駕駛員行為定義和分析,主要衍生于兩種基本模式Aggressiveness 和Carefulness,定義如下。
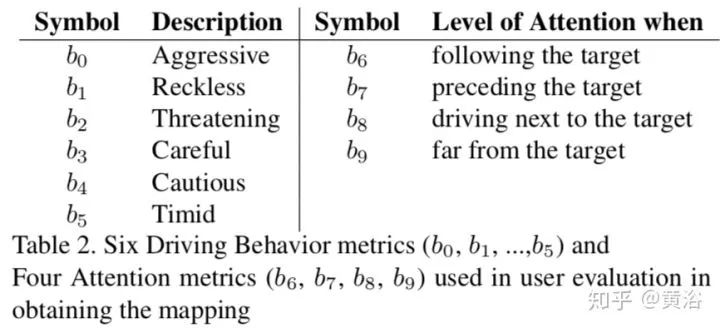
其中0-5是駕駛行為測(cè)度,6-9是注意(attention)測(cè)度。
很重要的一點(diǎn)是,作者定義了一組軌跡的特征,以此形成軌跡到行為的映射,10個(gè)候選特征見(jiàn)下表,其中綠色部分就是用來(lái)計(jì)算行為測(cè)度的,藍(lán)色是用來(lái)一起計(jì)算行為測(cè)度和注意測(cè)度。
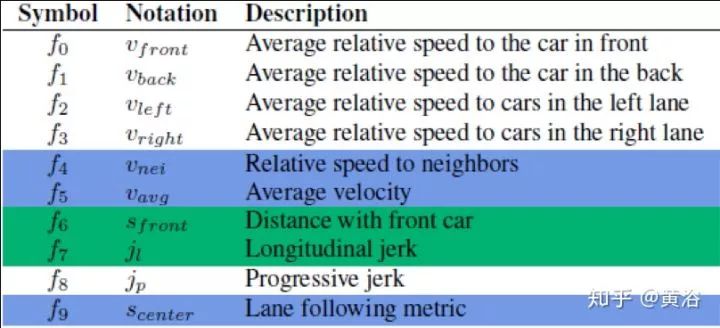
選擇特征的方法是基于LASSO分析,映射關(guān)系最終是矩陣形式。應(yīng)用在自動(dòng)駕駛時(shí),選擇了前面提到的AutonoVi規(guī)劃算法。
Uber Toronto最近的駕駛預(yù)測(cè)工作,有兩篇論文
"Fast and Furious: Real Time End-to-End 3D Detection, Tracking and Motion Forecasting with a Single Convolutional Net"
"IntentNet: Learning to Predict Intention from Raw Sensor Data"
第一篇論文介紹一種將目標(biāo)檢測(cè)工作和預(yù)測(cè)合為一體的系統(tǒng)FAF,如圖所示:
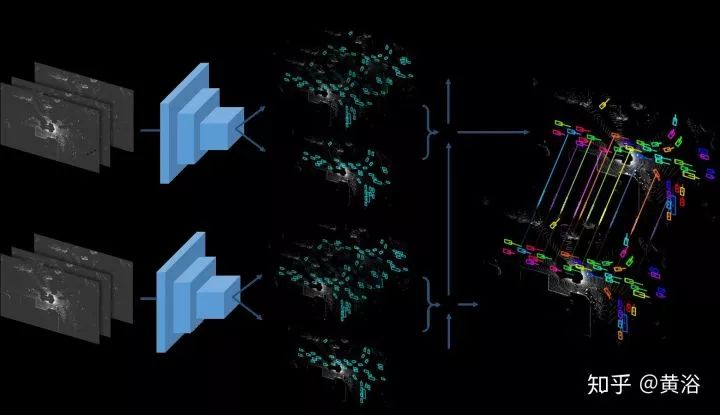
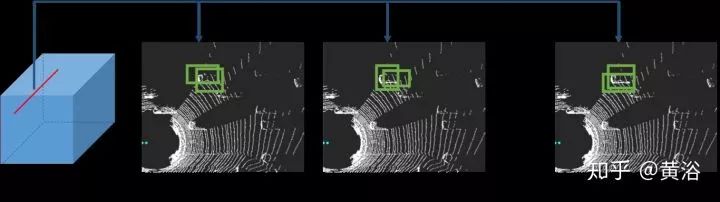
這里數(shù)據(jù)是激光雷達(dá)的點(diǎn)云,利用它的鳥(niǎo)瞰投影作為模型輸入。其實(shí)預(yù)測(cè)部分才是我們感興趣的,當(dāng)然三合一的NN模型是新穎的方式。模型輸入多幀數(shù)據(jù)構(gòu)成4-D張量,利用3-D卷積做預(yù)測(cè)。下圖是運(yùn)動(dòng)預(yù)測(cè)的示意圖(t, t+1, ...,t+n-1):
第二篇論文在此基礎(chǔ)上,定義意向(intent)是一個(gè)高級(jí)行為和連續(xù)的軌跡的組合,提出了一個(gè)預(yù)測(cè)意向的模型IntentNet。看看模型的輸入,輸出和模型結(jié)構(gòu)的介紹:
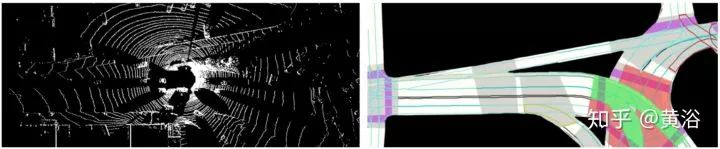
輸入如上圖,左邊是點(diǎn)云鳥(niǎo)瞰投影,右邊是靜態(tài)地圖部分,包括道路,車(chē)道,十字路口,交通牌和紅綠燈等。
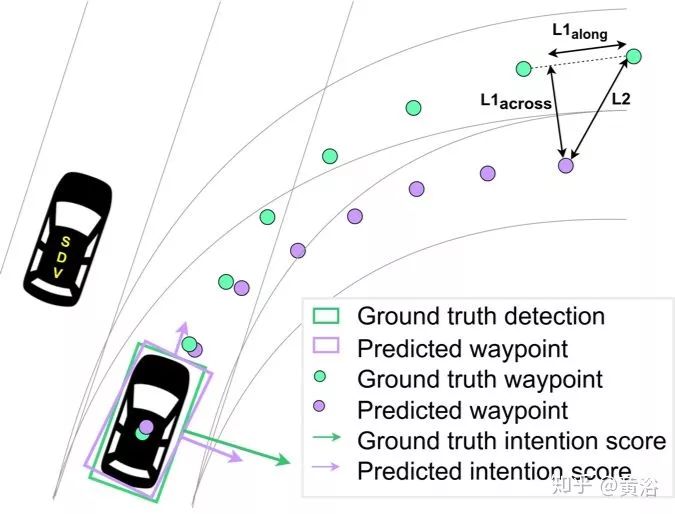
下圖是輸出部分:綠色是groundtruth,粉色是預(yù)測(cè)的結(jié)果,箭頭表示意向分?jǐn)?shù),針對(duì)定義的8種行為類(lèi)型而言,即保持車(chē)道,左轉(zhuǎn),右轉(zhuǎn),換左道,換右道,停止,泊車(chē)和其他。
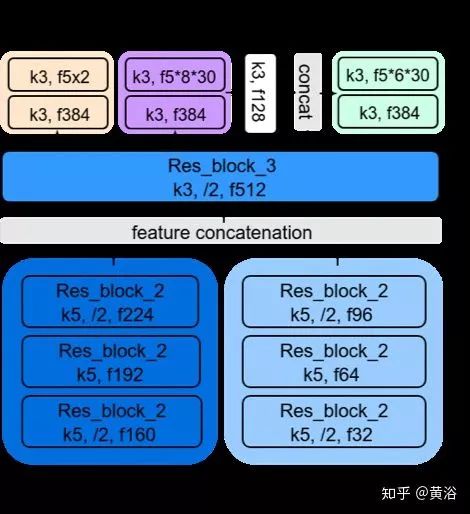
下圖是模型結(jié)構(gòu):一種后融合方法。
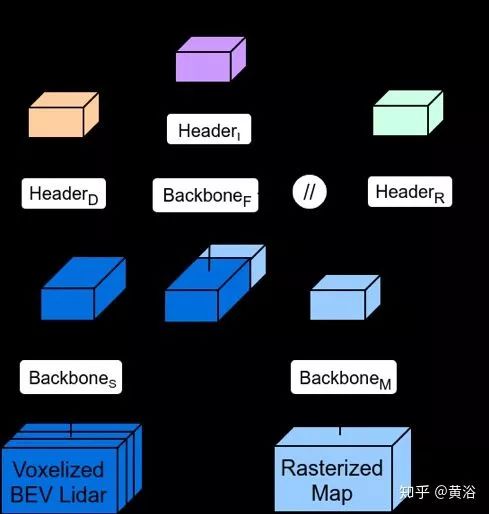
其中一些模型細(xì)節(jié):
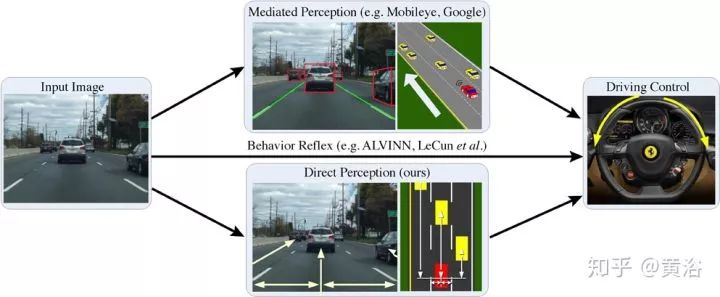
關(guān)于學(xué)習(xí)駕駛行為的工作,先介紹一篇相對(duì)舊的文章,是普林斯頓大學(xué)X教授研究組的:“DeepDriving: Learning Affordance for Direct Perception in Autonomous Driving“。
這個(gè)圖對(duì)E2E學(xué)習(xí)“老”司機(jī)駕駛的方法進(jìn)行劃分:mediated perception,分析觀測(cè)場(chǎng)景得到駕駛決策;behavior reflex 直接映射傳感器數(shù)據(jù)(圖像為例)到駕駛動(dòng)作,有些類(lèi)似特斯拉提出的Autopilot software 2.0;第三種方法,direct perception,作者定義affordance,標(biāo)記一些如車(chē)輛相對(duì)道路的角度,到車(chē)道線的距離,和相鄰車(chē)輛的距離等,這些信息由感知得到,然后映射到駕駛動(dòng)作。
沿著Affordance這個(gè)思路,看看最近蘇黎世ETH的駕駛行為學(xué)習(xí)工作:“Conditional Affordance Learning for Driving in Urban Environments“。
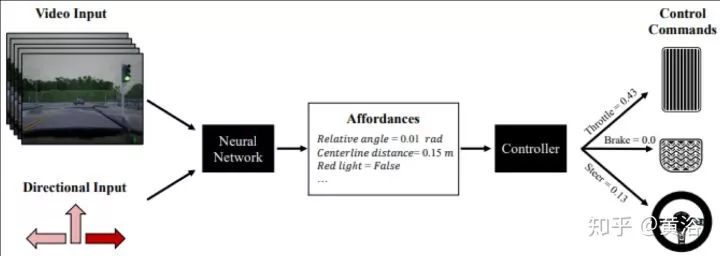
為了和模擬學(xué)習(xí)或條件性模擬學(xué)習(xí)區(qū)別開(kāi),作者稱(chēng)自己的方法為Conditional Affordance Learning (CAL) 。上圖所示,輸入的除了傳感器的數(shù)據(jù)(視頻為例),還有一些高級(jí)方向性的信號(hào),即“直行“,”左行“和”右行“之類(lèi)的行為類(lèi)別。
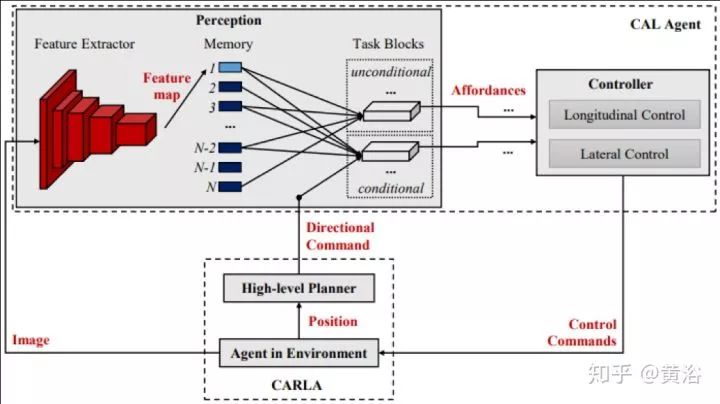
下圖給出系統(tǒng)的框圖:模型訓(xùn)練出來(lái)一組駕駛行為Affordance,送入車(chē)輛控制器。
定義的Affordance見(jiàn)左下表:分類(lèi)取決于種類(lèi)(連續(xù)/離散)和條件性(紅綠燈,限速)。
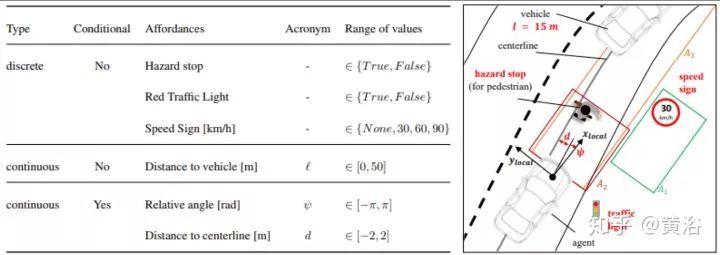
文中定義了6個(gè)危險(xiǎn)事件:駕駛車(chē)道錯(cuò)誤,車(chē)上行人道,闖紅燈,車(chē)相撞,撞行人,和撞靜態(tài)物體。訓(xùn)練在開(kāi)源仿真模擬軟件Carla進(jìn)行,測(cè)試也是。
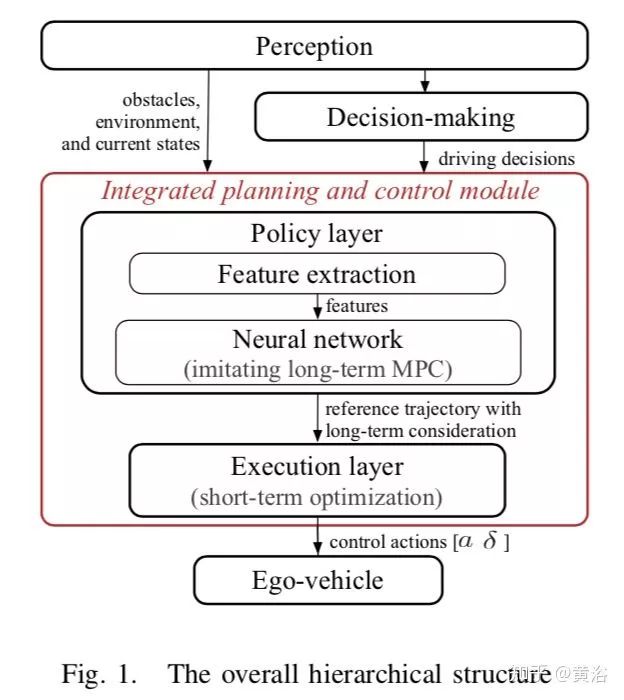
加州伯克利分校的這個(gè)工作是通過(guò)模擬學(xué)習(xí)(Imitation Learning)方法得到一個(gè)集成規(guī)劃和控制的框架,結(jié)合了機(jī)器學(xué)習(xí)和優(yōu)化理論的兩層分級(jí)結(jié)構(gòu):“A Fast Integrated Planning and Control Framework for Autonomous Driving via Imitation Learning“ 。
這個(gè)框架的第一層是policy layer,通過(guò)NN學(xué)習(xí)長(zhǎng)期的最優(yōu)MPC駕駛策略,第二層是execution layer,主要跟蹤上一層policy layer生成的參考軌跡(reference trajectory),是一個(gè)保證短期安全和可行性的基于優(yōu)化的短期控制器。特別提出的一點(diǎn),第一層采用在線模擬學(xué)習(xí),其中借用了dataset aggregation(DAgger)的方法,可以快速連續(xù)地改進(jìn)policy layer。
下圖是整個(gè)分級(jí)二層結(jié)構(gòu):包括感知,決策,規(guī)劃控制等模塊。它不是一個(gè)E2E的模擬學(xué)習(xí)方法,其實(shí)包括感知在內(nèi)的E2E機(jī)器學(xué)習(xí)框架是比較risky的,以前也提過(guò)這種corner case太多。
下圖是定義的Sampled DAgger,用在policy layer的模擬學(xué)習(xí):
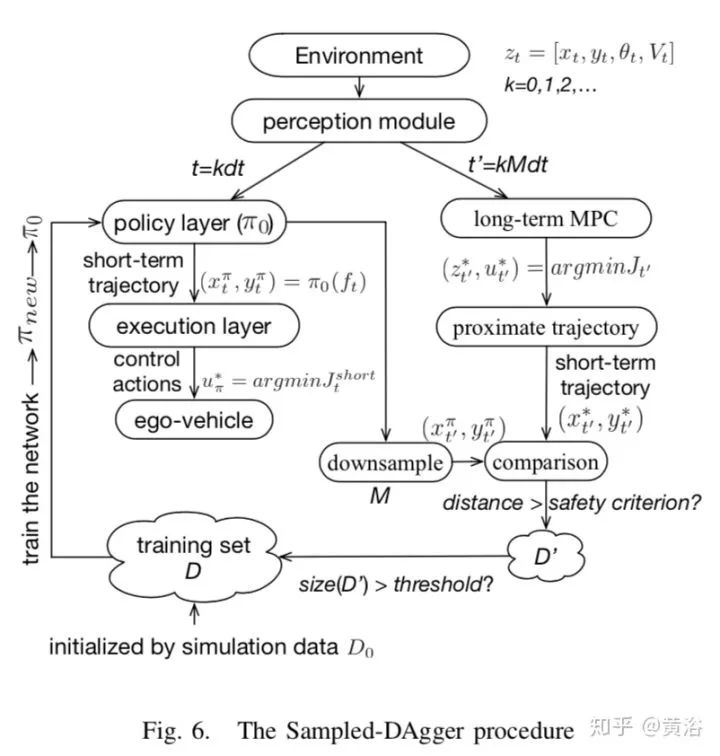
跟以前的DAgger相比,Sampled DAgger的數(shù)據(jù)效率更高。
另外,論文里做了對(duì)學(xué)習(xí)的policy泛化處理,可以用在復(fù)雜的駕駛場(chǎng)景,下圖是一個(gè)多車(chē)道的駕駛場(chǎng)景:
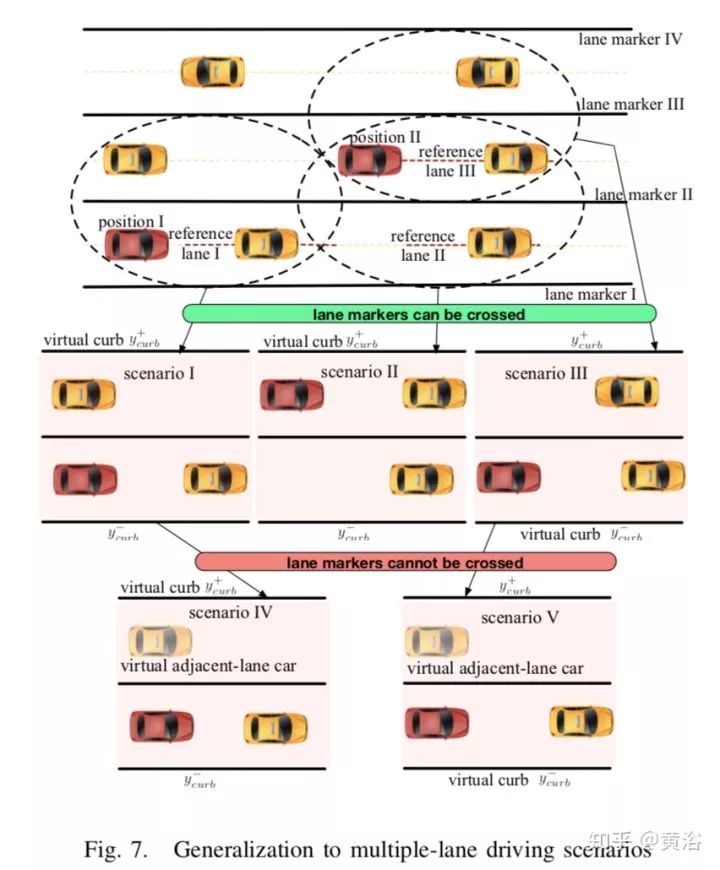
泛化就是將一個(gè)連續(xù)駕駛的問(wèn)題降為一系列的抽象場(chǎng)景,而每個(gè)抽象場(chǎng)景能直接應(yīng)用學(xué)習(xí)的policy模型來(lái)求解。
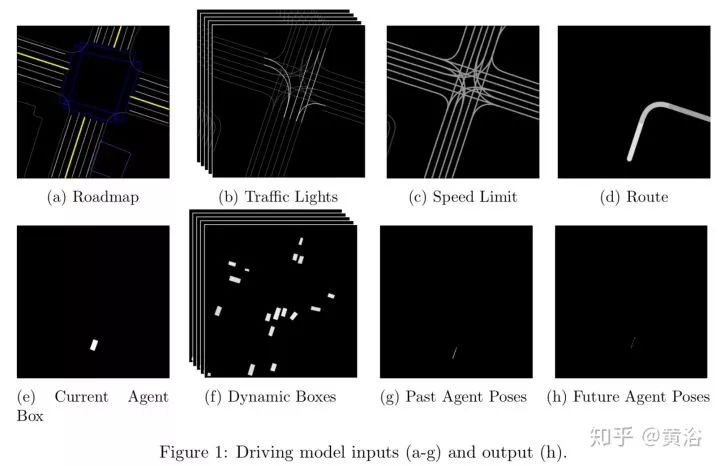
谷歌WayMo的最新文章介紹通過(guò)駕駛數(shù)據(jù)模擬學(xué)習(xí)駕駛策略:“ChauffeurNet: Learning to Drive by Imitating the Best and Synthesizing the Worst“。
該文反對(duì)純粹地模擬所有數(shù)據(jù),而是在模擬損失上附加一些損失(比如碰撞,離開(kāi)路和幾何上軌跡的不光滑等)來(lái)懲罰不期望出現(xiàn)的事件和鼓勵(lì)進(jìn)步,這些擾動(dòng)增強(qiáng)了模型的魯棒性。實(shí)驗(yàn)中表明ChauffeurNet模型可以處理復(fù)雜的情況。
以下圖是模型的輸入-輸出:地圖,交通燈,限速,路徑,自身位置和姿態(tài),其他車(chē)輛/行人/自行車(chē)的位置和姿態(tài)和自身姿態(tài)的過(guò)去軌跡,作為輸入,而輸出是自身的下一個(gè)姿態(tài)。
駕駛模型包括幾個(gè)部分,如下圖:FeatureNet,AgentRNN,Road Mask Net,PerceptionRNN。
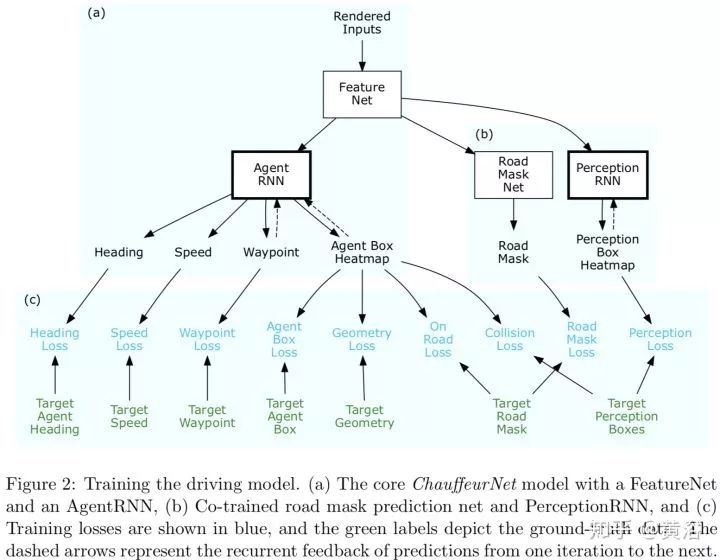
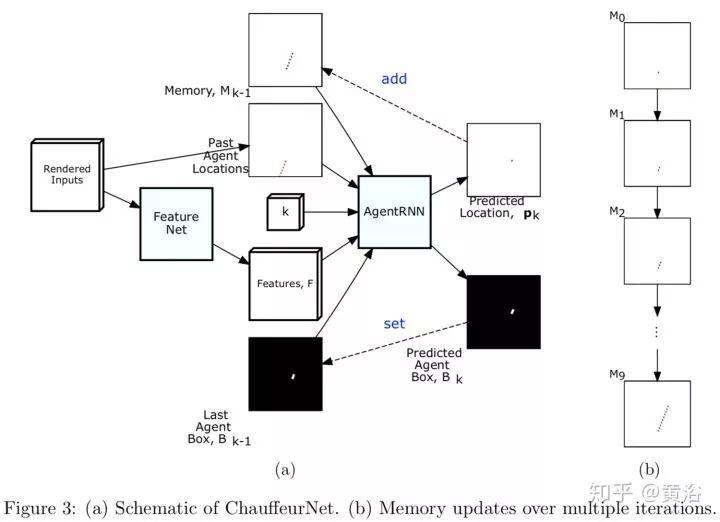
更詳細(xì)的描述可以見(jiàn)下圖:那些輸入先進(jìn)入FeatureNet輸出Feature,然后再進(jìn)入AgentRNN來(lái)預(yù)測(cè)駕駛軌跡的下一個(gè)位置,車(chē)身的heatMap,迭代次數(shù),以前預(yù)測(cè)的Memory(單通道圖像,是一個(gè)疊加型內(nèi)存,每次迭代會(huì)在預(yù)測(cè)位置加一),和上次迭代預(yù)測(cè)的車(chē)身heatMap。
整個(gè)軟件系統(tǒng)框圖如下:

實(shí)驗(yàn)中特意提到有一個(gè)路旁停車(chē)被成功地繞開(kāi)的例子。
總的看,駕駛行為的學(xué)習(xí)以及對(duì)其他車(chē)輛駕駛的預(yù)測(cè)都是目前比較關(guān)鍵的問(wèn)題,如果感知的一些不足,可以說(shuō)是一些失誤,能不能被行為模型看成噪聲或者干擾而成功忽略和“屏蔽”,那么就是自動(dòng)駕駛模塊化的研發(fā)過(guò)程中成功的進(jìn)步。但目前的實(shí)驗(yàn),還不能證明這一點(diǎn),主要是數(shù)據(jù)不夠,而且駕駛模型中ontology也不完備。
另外大家也認(rèn)為感知和規(guī)劃應(yīng)該被看成一個(gè)整體,所以研發(fā)的次序應(yīng)該是在感知和規(guī)劃+控制的交替中前進(jìn),感知的進(jìn)步會(huì)驅(qū)使駛決策模型的更新。
-
adas
+關(guān)注
關(guān)注
309文章
2191瀏覽量
208773 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13918瀏覽量
166783
原文標(biāo)題:自動(dòng)駕駛中的駕駛行為建模和預(yù)測(cè)方法
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車(chē)科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
車(chē)輛電子檔案系統(tǒng)

守護(hù)駕駛安全,駕駛員監(jiān)控系統(tǒng)DMS應(yīng)用解決方案

華為發(fā)布駕駛員行為異常檢測(cè)新專(zhuān)利
豐田與NTT合作開(kāi)發(fā)自動(dòng)駕駛軟件,AI預(yù)測(cè)事故助力安全駕駛
智能駕駛對(duì)環(huán)境保護(hù)的貢獻(xiàn)
智能駕駛所需的基礎(chǔ)設(shè)施
智能駕駛與自動(dòng)駕駛的關(guān)系
智能駕駛對(duì)交通安全的影響
智能駕駛系統(tǒng)的工作原理
智能駕駛與傳統(tǒng)駕駛的區(qū)別
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
深度學(xué)習(xí)在自動(dòng)駕駛中的關(guān)鍵技術(shù)
未來(lái)已來(lái),多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
Waymo自愿召回444輛自動(dòng)駕駛汽車(chē) L4的自動(dòng)駕駛還有很多路要走






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論