 應用于無人駕駛車輛的雷達感應技術的介紹
應用于無人駕駛車輛的雷達感應技術的介紹
傳感器是無人駕駛車輛的關鍵部件。能夠監控前方,后方或側面的車輛距離,為中央控制器提供重要數據。光學和紅外攝像機,激光,超聲波和雷達都可用于提供有關周圍環境,道路和其他車輛的數據。例如,攝像機可用于檢測道路上的標記,以使車輛保持在正確的車道上。這已用于在高級駕駛輔助系統(ADAS)中提供車道偏離警告。今天的ADAS系統還使用雷達進行碰撞檢測警告和自適應巡航控制,車輛可以跟隨前方車輛。
如果沒有駕駛員輸入,自動駕駛汽車需要更多傳感器系統,通常使用多個輸入從不同的傳感器提供更高水平的保證。盡管系統架構正在改變以管理更廣泛的傳感器和更高的數據速率,但這些傳感器系統正在從成熟的ADAS實施中進行調整。
隨著ADAS系統越來越多地采用自適應巡航控制和碰撞檢測,24 GHz雷達傳感器的成本正在下降。這些現在成為汽車制造商在歐洲獲得最高五星級NCAP安全評級的要求。
例如,英飛凌科技公司的BGT24M 24GHz雷達傳感器可與電子控制單元(ECU)中的外部微控制器一起使用,以修改油門以保持與前方車輛的恒定距離范圍最大為20 m,如圖1所示。

圖1:英飛凌科技公司的汽車雷達傳感系統。
< p>許多汽車雷達系統使用脈沖多普勒方法,其中發射機工作一段短時間,稱為脈沖重復間隔(PRI),然后系統切換到接收模式直到下一個發射脈沖。當雷達返回時,反射被相干處理以提取檢測到的物體的范圍和相對運動。
另一種方法是使用連續波頻率調制(CWFM)。這使用連續載波頻率,該頻率隨著接收器的不斷變化而不斷變化。為防止發射信號泄漏到接收器中,必須使用單獨的發射和接收天線。
BGT24MTR12是用于信號發生和接收的硅鍺(SiGe)傳感器,工作頻率為24.0至24.25 GHz 。它采用24 GHz基本壓控振蕩器,包括一個可切換頻率預分頻器,輸出頻率為1.5 GHz和23 kHz。
RC多相濾波器(PPF)用于下變頻混頻器的LO正交相位生成,而輸出功率傳感器和溫度傳感器集成在器件中進行監控。
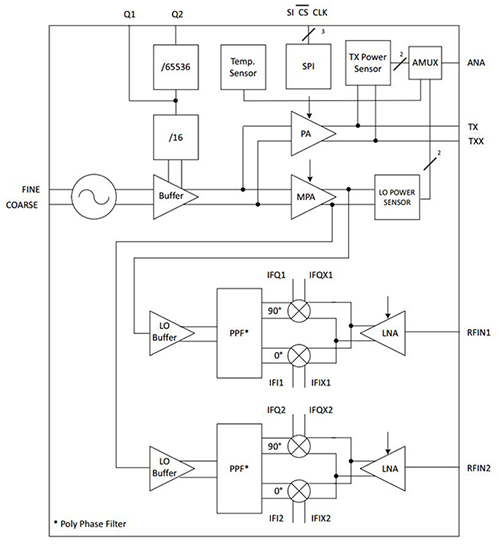
圖2:英飛凌科技的BGT24MTR12雷達傳感器。
該器件通過SPI控制,采用0.18μmSiGe:C技術制造,截止頻率為200 GHz,采用32引腳無引腳VQFN封裝。
然而,架構正在發生變化用于無人駕駛車輛。車輛周圍各種雷達系統的數據代替本地ECU,被送入中央高性能控制器,該控制器將信號與來自攝像機和可能來自激光雷達傳感器的信號相結合。
控制器可以是帶有圖形控制單元(GCU)的高性能通用處理器,也可以是現場可編程門陣列,其中信號處理可由專用硬件處理。這更加強調必須處理更高數據速率和更多數據源的模擬前端(AFE)接口設備。
所使用的雷達傳感器類型也在發生變化。 77 GHz傳感器提供更長的距離和更高的分辨率。 77 GHz或79 GHz雷達傳感器可以實時調整,在10°弧度范圍內提供長達200 m的長距離傳感,例如用于檢測其他車輛,但它也可以用于更寬的30°傳感弧度較低,范圍為30米。較高的頻率提供了更高的分辨率,允許雷達傳感器系統實時區分多個物體,例如在30°弧內檢測多個行人,為無人駕駛車輛提供更多時間和更多數據的控制器。
77 GHz傳感器使用具有300 GHz振蕩頻率的硅鍺雙極晶體管。這允許一個雷達傳感器用于多個安全系統,例如車頭時距警報,碰撞警告和自動制動,77 GHz技術也更能抵抗車輛振動,因此需要更少的過濾。
應用探測范圍安全方面技術自適應巡航控制200米正常駕駛,事故避免77 GHz雷達預碰撞30米事故,減輕沖擊77 GHz雷達/24 GHz雷達
76/81 GHz雷達盲點探測20米正常駕駛,事故避免77 GHz雷達/24 GHz雷達/視覺傳感器車道偏離警告60米正常駕駛,事故避免視覺傳感器停止和走30米正常駕駛,事故避免77 GHz雷達/24 GHz雷達
76/81 GHz雷達
圖3:NXP針對無人駕駛車輛中雷達傳感器的不同使用情況。
傳感器用于檢測車輛坐標系中目標車輛的航程,速度和方位角( VCS)。數據的準確性取決于雷達傳感器的精確對準。
雷達傳感器對準算法在車輛運行時執行超過40 Hz。在1 ms內,它必須根據雷達傳感器提供的數據,車輛速度,傳感器在車輛上的位置以及指向角來計算錯位角度。
軟件工具可用于分析從道路測試中捕獲的記錄的傳感器數據。該測試數據可用于開發雷達傳感器對準算法,該算法使用最小二乘算法計算來自原始雷達檢測和主車輛速度的傳感器未對準角度。這也可以根據最小二乘解的殘差來估計計算角度的精度。
系統架構
模擬前端,如德州儀器的AFE5401-Q1(圖4)可用于將雷達傳感器連接到汽車系統的其余部分,如圖1所示.AFE5401包括四個通道,每個通道包括一個低噪聲放大器(LNA),一個可選均衡器(EQ),一個可編程增益放大器(PGA)和一個抗混疊濾波器,后面跟著一個高速,12位,模數轉換器(ADC),每通道25 MSPS。四個ADC輸出在12位并行CMOS兼容輸出總線上復用。
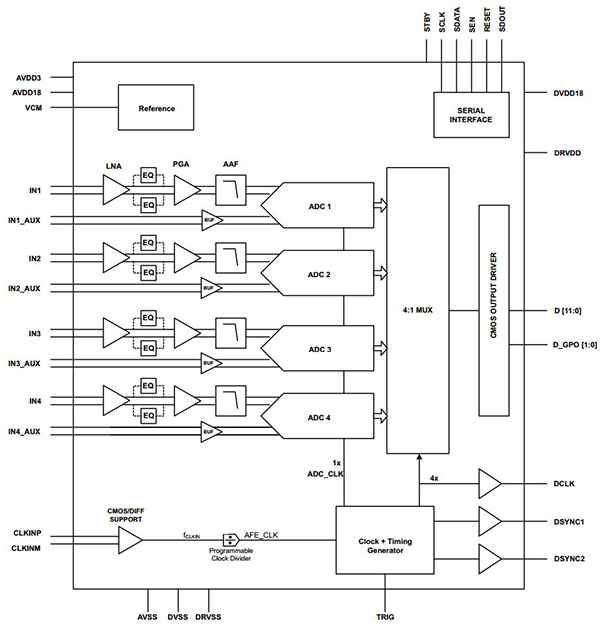
圖4:德州儀器的AFE5401雷達模擬前端的四個通道可用于多個傳感器。
對于低成本系統,ADI公司的AD8284提供模擬前端采用四通道差分多路復用器(mux),為單通道低噪聲前置放大器(LNA)提供可編程增益放大器(PGA)和抗混疊濾波器(AAF)。這也使用單個直接到ADC通道,所有通道都集成了一個12位模數轉換器(ADC)。 AD8284還集成了飽和檢測電路,用于高頻過壓條件,否則將被AAF濾波。模擬通道的增益范圍為17 dB至35 dB,增量為6 dB,ADC的轉換速率最高為60 MSPS。在最大增益時,整個通道的組合輸入參考電壓噪聲為3.5 nV/√Hz。
AFE的輸出被送入處理器或FPGA,如IGLOO2或Microsemi的Fusion或Intel的Cyclone IV。這可以使用FPGA設計工具在硬件中實現2D FFT,以處理FFT并提供周圍對象所需的數據。然后可以將其輸入中央控制器。
FPGA的一個關鍵挑戰是檢測多個對象,這對于CWFM架構而言比脈沖多普勒更復雜。一種方法是改變斜坡的持續時間和頻率,并評估檢測到的頻率如何在頻譜中以不同的頻率斜坡陡度移動。由于斜坡可以以1 ms的間隔變化,因此每秒可以分析數百種變化。
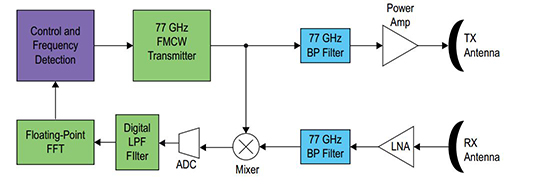
圖5:CWFM雷達前端用于來自英特爾的FPGA。
來自其他傳感器的數據融合也可以提供幫助,因為相機數據可用于區分車輛更強的回報與人們的回報較弱,以及期望的多普勒偏移量。
另一種選擇是多模雷達,它使用CWFM在高速公路上尋找更遠距離的目標,而短程脈沖多普勒雷達則用于更容易被探測到行人的城市地區。
結論
無人駕駛車輛ADAS傳感器系統的發展正在改變雷達系統的實施方式。從簡單的碰撞避免或自適應巡航控制轉向全面檢測是一項重大挑戰。雷達是一種非常流行的傳感技術,已經與汽車制造商建立了良好的關系,因此是這種方法的領先技術。將更高頻率的77 GHz傳感器與多模CWFM和脈沖多普勒架構以及來自其他傳感器(如攝像頭)的數據結合在一起,也為處理子系統帶來了巨大挑戰。以安全,一致和具有成本效益的方式解決這些挑戰對于自動駕駛汽車的持續發展至關重要。
-
傳感器
+關注
關注
2552文章
51360瀏覽量
755692 -
無人駕駛
+關注
關注
98文章
4086瀏覽量
120786 -
自動駕駛
+關注
關注
784文章
13918瀏覽量
166791
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論