") can總線終端電阻 can終端電阻阻值多少
can總線終端電阻 can終端電阻阻值多少
本文主要是關(guān)于can總線的相關(guān)介紹,并著重對(duì)can總線終端電阻進(jìn)行了詳盡的闡述。
can總線
CAN是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡(jiǎn)稱,是由以研發(fā)和生產(chǎn)汽車電子產(chǎn)品著稱的德國(guó)BOSCH公司開(kāi)發(fā)的,并最終成為國(guó)際標(biāo)準(zhǔn)(ISO 11898),是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。 在北美和西歐,CAN總線協(xié)議已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線,并且擁有以CAN為底層協(xié)議專為大型貨車和重工機(jī)械車輛設(shè)計(jì)的J1939協(xié)議。
CAN 是Controller Area Network 的縮寫(以下稱為CAN),是ISO國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。在汽車產(chǎn)業(yè)中,出于對(duì)安全性、舒適性、方便性、低公害、低成本的要求,各種各樣的電子控制系統(tǒng)被開(kāi)發(fā)了出來(lái)。由于這些系統(tǒng)之間通信所用的數(shù)據(jù)類型及對(duì)可靠性的要求不盡相同,由多條總線構(gòu)成的情況很多,線束的數(shù)量也隨之增加。為適應(yīng)“減少線束的數(shù)量”、“通過(guò)多個(gè)LAN,進(jìn)行大量數(shù)據(jù)的高速通信”的需要,1986 年德國(guó)電氣商博世公司開(kāi)發(fā)出面向汽車的CAN 通信協(xié)議。此后,CAN 通過(guò)ISO11898 及ISO11519 進(jìn)行了標(biāo)準(zhǔn)化,在歐洲已是汽車網(wǎng)絡(luò)的標(biāo)準(zhǔn)協(xié)議。
CAN 的高性能和可靠性已被認(rèn)同,并被廣泛地應(yīng)用于工業(yè)自動(dòng)化、船舶、醫(yī)療設(shè)備、工業(yè)設(shè)備等方面。現(xiàn)場(chǎng)總線是當(dāng)今自動(dòng)化領(lǐng)域技術(shù)發(fā)展的熱點(diǎn)之一,被譽(yù)為自動(dòng)化領(lǐng)域的計(jì)算機(jī)局域網(wǎng)。它的出現(xiàn)為分布式控制系統(tǒng)實(shí)現(xiàn)各節(jié)點(diǎn)之間實(shí)時(shí)、可靠的數(shù)據(jù)通信提供了強(qiáng)有力的技術(shù)支持。
優(yōu)勢(shì)
CAN屬于現(xiàn)場(chǎng)總線的范疇,它是一種有效支持分布式控制或?qū)崟r(shí)控制的串行通信網(wǎng)絡(luò)。較之許多RS-485基于R線構(gòu)建的分布式控制系統(tǒng)而言,基于CAN總線的分布式控制系統(tǒng)在以下方面具有明顯的優(yōu)越性:
網(wǎng)絡(luò)各節(jié)點(diǎn)之間的數(shù)據(jù)通信實(shí)時(shí)性強(qiáng)
首先,CAN控制器工作于多種方式,網(wǎng)絡(luò)中的各節(jié)點(diǎn)都可根據(jù)總線訪問(wèn)優(yōu)先權(quán)(取決于報(bào)文標(biāo)識(shí)符)采用無(wú)損結(jié)構(gòu)的逐位仲裁的方式競(jìng)爭(zhēng)向總線發(fā)送數(shù)據(jù),且CAN協(xié)議廢除了站地址編碼,而代之以對(duì)通信數(shù)據(jù)進(jìn)行編碼,這可使不同的節(jié)點(diǎn)同時(shí)接收到相同的數(shù)據(jù),這些特點(diǎn)使得CAN總線構(gòu)成的網(wǎng)絡(luò)各節(jié)點(diǎn)之間的數(shù)據(jù)通信實(shí)時(shí)性強(qiáng),并且容易構(gòu)成冗余結(jié)構(gòu),提高系統(tǒng)的可靠性和系統(tǒng)的靈活性。而利用RS-485只能構(gòu)成主從式結(jié)構(gòu)系統(tǒng),通信方式也只能以主站輪詢的方式進(jìn)行,系統(tǒng)的實(shí)時(shí)性、可靠性較差;
開(kāi)發(fā)周期短
CAN總線通過(guò)CAN收發(fā)器接口芯片82C250的兩個(gè)輸出端CANH和CANL與物理總線相連,而CANH端的狀態(tài)只能是高電平或懸浮狀態(tài),CANL端只能是低電平或懸浮狀態(tài)。這就保證不會(huì)在出現(xiàn)在RS-485網(wǎng)絡(luò)中的現(xiàn)象,即當(dāng)系統(tǒng)有錯(cuò)誤,出現(xiàn)多節(jié)點(diǎn)同時(shí)向總線發(fā)送數(shù)據(jù)時(shí),導(dǎo)致總線呈現(xiàn)短路,從而損壞某些節(jié)點(diǎn)的現(xiàn)象。而且CAN節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重的情況下具有自動(dòng)關(guān)閉輸出功能,以使總線上其他節(jié)點(diǎn)的操作不受影響,從而保證不會(huì)出現(xiàn)像在網(wǎng)絡(luò)中,因個(gè)別節(jié)點(diǎn)出現(xiàn)問(wèn)題,使得總線處于“死鎖”狀態(tài)。而且,CAN具有的完善的通信協(xié)議可由CAN控制器芯片及其接口芯片來(lái)實(shí)現(xiàn),從而大大降低系統(tǒng)開(kāi)發(fā)難度,縮短了開(kāi)發(fā)周期,這些是僅有電氣協(xié)議的RS-485所無(wú)法比擬的。
已形成國(guó)際標(biāo)準(zhǔn)的現(xiàn)場(chǎng)總線
另外,與其它現(xiàn)場(chǎng)總線比較而言,CAN總線是具有通信速率高、容易實(shí)現(xiàn)、且性價(jià)比高等諸多特點(diǎn)的一種已形成國(guó)際標(biāo)準(zhǔn)的現(xiàn)場(chǎng)總線。這些也是CAN總線應(yīng)用于眾多領(lǐng)域,具有強(qiáng)勁的市場(chǎng)競(jìng)爭(zhēng)力的重要原因。
最有前途的現(xiàn)場(chǎng)總線之一
CAN 即控制器局域網(wǎng)絡(luò),屬于工業(yè)現(xiàn)場(chǎng)總線的范疇。與一般的通信總線相比,CAN總線的數(shù)據(jù)通信具有突出的可靠性、實(shí)時(shí)性和靈活性。由于其良好的性能及獨(dú)特的設(shè)計(jì),CAN總線越來(lái)越受到人們的重視。它在汽車領(lǐng)域上的應(yīng)用是最廣泛的,世界上一些著名的汽車制造廠商都采用了CAN總線來(lái)實(shí)現(xiàn)汽車內(nèi)部控制系統(tǒng)與各檢測(cè)和執(zhí)行機(jī)構(gòu)間的數(shù)據(jù)通信。同時(shí),由于CAN總線本身的特點(diǎn),其應(yīng)用范圍已不再局限于汽車行業(yè),而向自動(dòng)控制、航空航天、航海、過(guò)程工業(yè)、機(jī)械工業(yè)、紡織機(jī)械、農(nóng)用機(jī)械、機(jī)器人、數(shù)控機(jī)床、醫(yī)療器械及傳感器等領(lǐng)域發(fā)展。CAN已經(jīng)形成國(guó)際標(biāo)準(zhǔn),并已被公認(rèn)為幾種最有前途的現(xiàn)場(chǎng)總線之一。其典型的應(yīng)用協(xié)議有:SAE J1939/ISO11783、CANOpen、CANaerospace、DeviceNet、NMEA 2000等。
發(fā)展
控制器局部網(wǎng)(CAN-CONTROLLER AREA NETWORK)是BOSCH公司為現(xiàn)代汽車應(yīng)用領(lǐng)域推出的一種多主機(jī)局部網(wǎng),由于其高性能、高可靠性、實(shí)時(shí)性等優(yōu)點(diǎn)現(xiàn)已廣泛應(yīng)用于工業(yè)自動(dòng)化、多種控制設(shè)備、交通工具、醫(yī)療儀器以及建筑、環(huán)境控制等眾多部門。控制器局部網(wǎng)將在中國(guó)迅速普及推廣。
隨著計(jì)算機(jī)硬件、軟件技術(shù)及集成電路技術(shù)的迅速發(fā)展,工業(yè)控制系統(tǒng)已成為計(jì)算機(jī)技術(shù)應(yīng)用領(lǐng)域中最具活力的一個(gè)分支,并取得了巨大進(jìn)步。由于對(duì)系統(tǒng)可靠性和靈活性的高要求,工業(yè)控制系統(tǒng)的發(fā)展主要表現(xiàn)為:控制面向多元化,系統(tǒng)面向分散化,即負(fù)載分散、功能分散、危險(xiǎn)分散和地域分散。
分散式工業(yè)控制系統(tǒng)就是為適應(yīng)這種需要而發(fā)展起來(lái)的。這類系統(tǒng)是以微型機(jī)為核心,將 5C技術(shù)--COMPUTER(計(jì)算機(jī)技術(shù))、CONTROL(自動(dòng)控制技術(shù))、COMMUNICATION(通信技術(shù))、CRT(顯示技術(shù))和 CHANGE(轉(zhuǎn)換技術(shù))緊密結(jié)合的產(chǎn)物。它在適應(yīng)范圍、可擴(kuò)展性、可維護(hù)性以及抗故障能力等方面,較之分散型儀表控制系統(tǒng)和集中型計(jì)算機(jī)控制系統(tǒng)都具有明顯的優(yōu)越性。
典型的分散式控制系統(tǒng)由現(xiàn)場(chǎng)設(shè)備、接口與計(jì)算設(shè)備以及通信設(shè)備組成。現(xiàn)場(chǎng)總線(FIELDBUS)能同時(shí)滿足過(guò)程控制和制造業(yè)自動(dòng)化的需要,因而現(xiàn)場(chǎng)總線已成為工業(yè)數(shù)據(jù)總線領(lǐng)域中最為活躍的一個(gè)領(lǐng)域。現(xiàn)場(chǎng)總線的研究與應(yīng)用已成為工業(yè)數(shù)據(jù)總線領(lǐng)域的熱點(diǎn)。盡管對(duì)現(xiàn)場(chǎng)總線的研究尚未能提出一個(gè)完善的標(biāo)準(zhǔn),但現(xiàn)場(chǎng)總線的高性能價(jià)格必將吸引眾多工業(yè)控制系統(tǒng)采用。同時(shí),正由于現(xiàn)場(chǎng)總線的標(biāo)準(zhǔn)尚未統(tǒng)一,也使得現(xiàn)場(chǎng)總線的應(yīng)用得以不拘一格地發(fā)揮,并將為現(xiàn)場(chǎng)總線的完善提供更加豐富的依據(jù)。控制器局部網(wǎng) CAN(CONTROLLER AERANETWORK)正是在這種背景下應(yīng)運(yùn)而生的。
由于CAN為愈來(lái)愈多不同領(lǐng)域采用和推廣,導(dǎo)致要求各種應(yīng)用領(lǐng)域通信報(bào)文的標(biāo)準(zhǔn)化。為此,1991年 9月 PHILIPS SEMICONDUCTORS制訂并發(fā)布了 CAN技術(shù)規(guī)范(VERSION 2.0)。該技術(shù)規(guī)范包括A和B兩部分。2.0A給出了曾在CAN技術(shù)規(guī)范版本1.2中定義的CAN報(bào)文格式,能提供11位地址;而2.0B給出了標(biāo)準(zhǔn)的和擴(kuò)展的兩種報(bào)文格式,提供29位地址。此后,1993年11月ISO正式頒布了道路交通運(yùn)載工具--數(shù)字信息交換--高速通信控制器局部網(wǎng)(CAN)國(guó)際標(biāo)準(zhǔn)(ISO11898),為控制器局部網(wǎng)標(biāo)準(zhǔn)化、規(guī)范化推廣鋪平了道路。
特點(diǎn)
CAN總線是德國(guó)BOSCH公司從80年代初為解決現(xiàn)代汽車中眾多的控制與測(cè)試儀器之間的數(shù)據(jù)交換而開(kāi)發(fā)的一種串行數(shù)據(jù)通信協(xié)議,它是一種多主總線,通信介質(zhì)可以是雙絞線、同軸電纜或光導(dǎo)纖維。通信速率最高可達(dá)1Mbps。
完成對(duì)通信數(shù)據(jù)的成幀處理
CAN總線通信接口中集成了CAN協(xié)議的物理層和數(shù)據(jù)鏈路層功能,可完成對(duì)通信數(shù)據(jù)的成幀處理,包括位填充、數(shù)據(jù)塊編碼、循環(huán)冗余檢驗(yàn)、優(yōu)先級(jí)判別等項(xiàng)工作。
使網(wǎng)絡(luò)內(nèi)的節(jié)點(diǎn)個(gè)數(shù)在理論上不受限制
CAN協(xié)議的一個(gè)最大特點(diǎn)是廢除了傳統(tǒng)的站地址編碼,而代之以對(duì)通信數(shù)據(jù)塊進(jìn)行編碼。采用這種方法的優(yōu)點(diǎn)可使網(wǎng)絡(luò)內(nèi)的節(jié)點(diǎn)個(gè)數(shù)在理論上不受限制,數(shù)據(jù)塊的標(biāo)識(shí)符可由11位或29位二進(jìn)制數(shù)組成,因此可以定義2或2個(gè)以上不同的數(shù)據(jù)塊,這種按數(shù)據(jù)塊編碼的方式,還可使不同的節(jié)點(diǎn)同時(shí)接收到相同的數(shù)據(jù),這一點(diǎn)在分布式控制系統(tǒng)中非常有用。數(shù)據(jù)段長(zhǎng)度最多為8個(gè)字節(jié),可滿足通常工業(yè)領(lǐng)域中控制命令、工作狀態(tài)及測(cè)試數(shù)據(jù)的一般要求。同時(shí),8個(gè)字節(jié)不會(huì)占用總線時(shí)間過(guò)長(zhǎng),從而保證了通信的實(shí)時(shí)性。CAN協(xié)議采用CRC檢驗(yàn)并可提供相應(yīng)的錯(cuò)誤處理功能,保證了數(shù)據(jù)通信的可靠性。CAN卓越的特性、極高的可靠性和獨(dú)特的設(shè)計(jì),特別適合工業(yè)過(guò)程監(jiān)控設(shè)備的互連,因此,越來(lái)越受到工業(yè)界的重視,并已公認(rèn)為最有前途的現(xiàn)場(chǎng)總線之一。
可在各節(jié)點(diǎn)之間實(shí)現(xiàn)自由通信
CAN總線采用了多主競(jìng)爭(zhēng)式總線結(jié)構(gòu),具有多主站運(yùn)行和分散仲裁的串行總線以及廣播通信的特點(diǎn)。CAN總線上任意節(jié)點(diǎn)可在任意時(shí)刻主動(dòng)地向網(wǎng)絡(luò)上其它節(jié)點(diǎn)發(fā)送信息而不分主次,因此可在各節(jié)點(diǎn)之間實(shí)現(xiàn)自由通信。CAN總線協(xié)議已被國(guó)際標(biāo)準(zhǔn)化組織認(rèn)證,技術(shù)比較成熟,控制的芯片已經(jīng)商品化,性價(jià)比高,特別適用于分布式測(cè)控系統(tǒng)之間的數(shù)據(jù)通訊。CAN總線插卡可以任意插在PC AT XT兼容機(jī)上,方便地構(gòu)成分布式監(jiān)控系統(tǒng)。
結(jié)構(gòu)簡(jiǎn)單
只有2根線與外部相連,并且內(nèi)部集成了錯(cuò)誤探測(cè)和管理模塊。
傳輸距離和速率
CAN總線特點(diǎn):(1) 數(shù)據(jù)通信沒(méi)有主從之分,任意一個(gè)節(jié)點(diǎn)可以向任何其他(一個(gè)或多個(gè))節(jié)點(diǎn)發(fā)起數(shù)據(jù)通信,靠各個(gè)節(jié)點(diǎn)信息優(yōu)先級(jí)先后順序來(lái)決定通信次序,高優(yōu)先級(jí)節(jié)點(diǎn)信息在134μs通信; (2) 多個(gè)節(jié)點(diǎn)同時(shí)發(fā)起通信時(shí),優(yōu)先級(jí)低的避讓優(yōu)先級(jí)高的,不會(huì)對(duì)通信線路造成擁塞; (3) 通信距離最遠(yuǎn)可達(dá)10KM(速率低于5Kbps)速率可達(dá)到1Mbps(通信距離小于40M);(4) CAN總線傳輸介質(zhì)可以是雙絞線,同軸電纜。CAN總線適用于大數(shù)據(jù)量短距離通信或者長(zhǎng)距離小數(shù)據(jù)量,實(shí)時(shí)性要求比較高,多主多從或者各個(gè)節(jié)點(diǎn)平等的現(xiàn)場(chǎng)中使用。
技術(shù)介紹
位仲裁
要對(duì)數(shù)據(jù)進(jìn)行實(shí)時(shí)處理,就必須將數(shù)據(jù)快速傳送,這就要求數(shù)據(jù)的物理傳輸通路有較高的速度。在幾個(gè)站同時(shí)需要發(fā)送數(shù)據(jù)時(shí),要求快速地進(jìn)行總線分配。實(shí)時(shí)處理通過(guò)網(wǎng)絡(luò)交換的緊急數(shù)據(jù)有較大的不同。一個(gè)快速變化的物理量,如汽車引擎負(fù)載,將比類似汽車引擎溫度這樣相對(duì)變化較慢的物理量更頻繁地傳送數(shù)據(jù)并要求更短的延時(shí)。
CAN總線以報(bào)文為單位進(jìn)行數(shù)據(jù)傳送,報(bào)文的優(yōu)先級(jí)結(jié)合在11位標(biāo)識(shí)符中,具有最低二進(jìn)制數(shù)的標(biāo)識(shí)符有最高的優(yōu)先級(jí)。這種優(yōu)先級(jí)一旦在系統(tǒng)設(shè)計(jì)時(shí)被確立后就不能再被更改。總線讀取中的沖突可通過(guò)位仲裁解決。例如標(biāo)識(shí)符0111111、0100100、0100111發(fā)生位仲裁時(shí),0100100報(bào)文將會(huì)被跟蹤,而其余報(bào)文會(huì)被丟棄。具體過(guò)程為:當(dāng)幾個(gè)站同時(shí)發(fā)送報(bào)文時(shí),站1的報(bào)文標(biāo)識(shí)符為0111111,站2的報(bào)文標(biāo)識(shí)符為0100110,站3的報(bào)文標(biāo)識(shí)符為0100111,所有標(biāo)識(shí)符都有相同的兩位01,直到第3位進(jìn)行比較時(shí),站1的報(bào)文被丟棄,因?yàn)樗牡?位為高,而其它兩個(gè)站的報(bào)文第3位為低。站2和站3報(bào)文的4、5、6位相同,直到第7位時(shí),站3的報(bào)文才被丟棄。注意,總線中的信號(hào)持續(xù)跟蹤最后獲得總線讀取權(quán)的站的報(bào)文。在此例中,站2的報(bào)文被跟蹤。這種非破壞性位仲裁方法的優(yōu)點(diǎn)在于,在網(wǎng)絡(luò)最終確定哪一個(gè)站的報(bào)文被傳送以前,報(bào)文的起始部分已經(jīng)在網(wǎng)絡(luò)上傳送了。所有未獲得總線讀取權(quán)的站都成為具有最高優(yōu)先權(quán)報(bào)文的接收站,并且不會(huì)在總線再次空閑前發(fā)送報(bào)文。
CAN具有較高的效率是因?yàn)榭偩€僅僅被那些請(qǐng)求總線懸而未決的站利用,這些請(qǐng)求是根據(jù)報(bào)文在整個(gè)系統(tǒng)中的重要性按順序處理的。這種方法在網(wǎng)絡(luò)負(fù)載較重時(shí)有很多優(yōu)點(diǎn),因?yàn)榭偩€讀取的優(yōu)先級(jí)已被按順序放在每個(gè)報(bào)文中了,這可以保證在實(shí)時(shí)系統(tǒng)中較低的個(gè)體隱伏時(shí)間。
對(duì)于主站的可靠性,由于CAN協(xié)議執(zhí)行非集中化總線控制,所有主要通信,包括總線讀取 (許可)控制,在系統(tǒng)中分幾次完成。這是實(shí)現(xiàn)有較高可靠性的通信系統(tǒng)的唯一方法。
CAN與其它通信方案的比較
在實(shí)踐中,有兩種重要的總線分配方法:按時(shí)間表分配和按需要分配。在第一種方法中,不管每個(gè)節(jié)點(diǎn)是否申請(qǐng)總線,都對(duì)每個(gè)節(jié)點(diǎn)按最大期間分配。由此,總線可被分配給每個(gè)站并且是唯一的站,而不論其是立即進(jìn)行總線存取或在一特定時(shí)間進(jìn)行總線存取。這將保證在總線存取時(shí)有明確的總線分配。在第二種方法中,總線按傳送數(shù)據(jù)的基本要求分配給一個(gè)站,總線系統(tǒng)按站希望的傳送分配(如:EthernetCSMA/CD)。因此,當(dāng)多個(gè)站同時(shí)請(qǐng)求總線存取時(shí),總線將終止所有站的請(qǐng)求,這時(shí)將不會(huì)有任何一個(gè)站獲得總線分配。為了分配總線,多于一個(gè)總線存取是必要的。
CAN實(shí)現(xiàn)總線分配的方法,可保證當(dāng)不同的站申請(qǐng)總線存取時(shí),明確地進(jìn)行總線分配。這種位仲裁的方法可以解決當(dāng)兩個(gè)站同時(shí)發(fā)送數(shù)據(jù)時(shí)產(chǎn)生的碰撞問(wèn)題。不同于Ethernet網(wǎng)絡(luò)的消息仲裁,CAN的非破壞性解決總線存取沖突的方法,確保在不傳送有用消息時(shí)總線不被占用。甚至當(dāng)總線在重負(fù)載情況下,以消息內(nèi)容為優(yōu)先的總線存取也被證明是一種有效的系統(tǒng)。雖然總線的傳輸能力不足,所有未解決的傳輸請(qǐng)求都按重要性順序來(lái)處理。在CSMA/CD這樣的網(wǎng)絡(luò)中,如Ethernet,系統(tǒng)往往由于過(guò)載而崩潰,而這種情況在CAN中不會(huì)發(fā)生。
CAN的報(bào)文格式
在總線中傳送的報(bào)文,每幀由7部分組成。CAN協(xié)議支持兩種報(bào)文格式,其唯一的不同是標(biāo)識(shí)符(ID)長(zhǎng)度不同,標(biāo)準(zhǔn)格式為11位,擴(kuò)展格式為29位。
在標(biāo)準(zhǔn)格式中,報(bào)文的起始位稱為幀起始(SOF),然后是由11位標(biāo)識(shí)符和遠(yuǎn)程發(fā)送請(qǐng)求位 (RTR)組成的仲裁場(chǎng)。RTR位標(biāo)明是數(shù)據(jù)幀還是請(qǐng)求幀,在請(qǐng)求幀中沒(méi)有數(shù)據(jù)字節(jié)。
控制場(chǎng)包括標(biāo)識(shí)符擴(kuò)展位(IDE),指出是標(biāo)準(zhǔn)格式還是擴(kuò)展格式。它還包括一個(gè)保留位 (ro),為將來(lái)擴(kuò)展使用。它的最后四個(gè)位用來(lái)指明數(shù)據(jù)場(chǎng)中數(shù)據(jù)的長(zhǎng)度(DLC)。數(shù)據(jù)場(chǎng)范圍為0~8個(gè)字節(jié),其后有一個(gè)檢測(cè)數(shù)據(jù)錯(cuò)誤的循環(huán)冗余檢查(CRC)。
應(yīng)答場(chǎng)(ACK)包括應(yīng)答位和應(yīng)答分隔符。發(fā)送站發(fā)送的這兩位均為隱性電平(邏輯1),這時(shí)正確接收?qǐng)?bào)文的接收站發(fā)送主控電平(邏輯0)覆蓋它。用這種方法,發(fā)送站可以保證網(wǎng)絡(luò)中至少有一個(gè)站能正確接收到報(bào)文。
報(bào)文的尾部由幀結(jié)束標(biāo)出。在相鄰的兩條報(bào)文間有一很短的間隔位,如果這時(shí)沒(méi)有站進(jìn)行總線存取,總線將處于空閑狀態(tài)。
CAN數(shù)據(jù)幀的組成
遠(yuǎn)程幀
遠(yuǎn)程幀由6個(gè)場(chǎng)組成:幀起始、仲裁場(chǎng)、控制場(chǎng)、CRC場(chǎng)、應(yīng)答場(chǎng)和幀結(jié)束。遠(yuǎn)程幀不存在數(shù)據(jù)場(chǎng)。
遠(yuǎn)程幀的RTR位必須是隱位。
DLC的數(shù)據(jù)值是獨(dú)立的,它可以是0~8中的任何數(shù)值,為對(duì)應(yīng)數(shù)據(jù)幀的數(shù)據(jù)長(zhǎng)度。
錯(cuò)誤幀
錯(cuò)誤幀由兩個(gè)不同場(chǎng)組成,第一個(gè)場(chǎng)由來(lái)自各站的錯(cuò)誤標(biāo)志疊加得到,第二個(gè)場(chǎng)是錯(cuò)誤界定符
錯(cuò)誤標(biāo)志具有兩種形式:
活動(dòng)錯(cuò)誤標(biāo)志(Active error flag),由6個(gè)連續(xù)的顯位組成
認(rèn)可錯(cuò)誤標(biāo)志(Passive error flag),由6個(gè)連續(xù)的隱位組成
錯(cuò)誤界定符包括8個(gè)隱位
超載幀
超載幀包括兩個(gè)位場(chǎng):超載標(biāo)志和超載界定符
發(fā)送超載幀的超載條件:
要求延遲下一個(gè)數(shù)據(jù)幀或遠(yuǎn)程幀
在間歇場(chǎng)檢測(cè)到顯位
超載標(biāo)志由6個(gè)顯位組成
超載界定符由8個(gè)隱位組成
數(shù)據(jù)錯(cuò)誤檢測(cè)
不同于其它總線,CAN協(xié)議不能使用應(yīng)答信息。事實(shí)上,它可以將發(fā)生的任何錯(cuò)誤用信號(hào)發(fā)出。CAN協(xié)議可使用五種檢查錯(cuò)誤的方法,其中前三種為基于報(bào)文內(nèi)容檢查。
3.4.1循環(huán)冗余檢查(CRC)
在一幀報(bào)文中加入冗余檢查位可保證報(bào)文正確。接收站通過(guò)CRC可判斷報(bào)文是否有錯(cuò)。
3.4.2 幀檢查
這種方法通過(guò)位場(chǎng)檢查幀的格式和大小來(lái)確定報(bào)文的正確性,用于檢查格式上的錯(cuò)誤。
3.4.3.應(yīng)答錯(cuò)誤
如前所述,被接收到的幀由接收站通過(guò)明確的應(yīng)答來(lái)確認(rèn)。如果發(fā)送站未收到應(yīng)答,那么表明接收站發(fā)現(xiàn)幀中有錯(cuò)誤,也就是說(shuō),ACK場(chǎng)已損壞或網(wǎng)絡(luò)中的報(bào)文無(wú)站接收。CAN協(xié)議也可通過(guò)位檢查的方法探測(cè)錯(cuò)誤。
3.4.4 總線檢測(cè)
有時(shí),CAN中的一個(gè)節(jié)點(diǎn)可監(jiān)測(cè)自己發(fā)出的信號(hào)。因此,發(fā)送報(bào)文的站可以觀測(cè)總線電平并探測(cè)發(fā)送位和接收位的差異。
3.4.5 位填充
一幀報(bào)文中的每一位都由不歸零碼表示,可保證位編碼的最大效率。然而,如果在一幀報(bào)文中有太多相同電平的位,就有可能失去同步。為保證同步,同步沿用位填充產(chǎn)生。在五個(gè)連續(xù)相等位后,發(fā)送站自動(dòng)插入一個(gè)與之互補(bǔ)的補(bǔ)碼位;接收時(shí),這個(gè)填充位被自動(dòng)丟掉。例如,五個(gè)連續(xù)的低電平位后,CAN自動(dòng)插入一個(gè)高電平位。CAN通過(guò)這種編碼規(guī)則檢查錯(cuò)誤,如果在一幀報(bào)文中有6個(gè)相同位,CAN就知道發(fā)生了錯(cuò)誤。
如果至少有一個(gè)站通過(guò)以上方法探測(cè)到 一個(gè)或多個(gè)錯(cuò)誤,它將發(fā)送出錯(cuò)標(biāo)志終止當(dāng)前的發(fā)送。這可以阻止其它站接收錯(cuò)誤的報(bào)文,并保證網(wǎng)絡(luò)上報(bào)文的一致性。當(dāng)大量發(fā)送數(shù)據(jù)被終止后,發(fā)送站會(huì)自動(dòng)地重新發(fā)送數(shù)據(jù)。作為規(guī)則,在探測(cè)到錯(cuò)誤后23個(gè)位周期內(nèi)重新開(kāi)始發(fā)送。在特殊場(chǎng)合,系統(tǒng)的恢復(fù)時(shí)間為31個(gè)位周期。
但這種方法存在一個(gè)問(wèn)題,即一個(gè)發(fā)生錯(cuò)誤的站將導(dǎo)致所有數(shù)據(jù)被終止,其中也包括正確的數(shù)據(jù)。因此,如果不采取自監(jiān)測(cè)措施,總線系統(tǒng)應(yīng)采用模塊化設(shè)計(jì)。為此,CAN協(xié)議提供一種將偶然錯(cuò)誤從永久錯(cuò)誤和局部站失敗中區(qū)別出來(lái)的辦法。這種方法可以通過(guò)對(duì)出錯(cuò)站統(tǒng)計(jì)評(píng)估來(lái)確定一個(gè)站本身的錯(cuò)誤并進(jìn)入一種不會(huì)對(duì)其它站產(chǎn)生不良影響的運(yùn)行方法來(lái)實(shí)現(xiàn),即站可以通過(guò)關(guān)閉自己來(lái)阻止正常數(shù)據(jù)因被錯(cuò)誤地當(dāng)成不正確的數(shù)據(jù)而被終止。
硬同步和重同步
硬同步只有在總線空閑狀態(tài)條件下隱形位到顯性位的跳變沿發(fā)生時(shí)才進(jìn)行,表明報(bào)文傳輸開(kāi)始。在硬同步之后,位時(shí)間計(jì)數(shù)器隨同步段重新開(kāi)始計(jì)數(shù)。硬同步強(qiáng)行將已發(fā)生的跳變沿置于重新開(kāi)始的位時(shí)間同步段內(nèi)。根據(jù)同步規(guī)則,如果某一位時(shí)間內(nèi)已有一個(gè)硬同步出現(xiàn),該位時(shí)間內(nèi)將不會(huì)發(fā)生再同步。再同步可能導(dǎo)致相位緩沖段1被延長(zhǎng)或相位緩沖段2被短。這兩個(gè)相位緩沖段的延長(zhǎng)時(shí)間或縮短時(shí)間上限由再同步跳轉(zhuǎn)寬度(SJW)給定。
can總線終端電阻
終端電阻,是一種電子信息在傳輸過(guò)程中遇到的阻礙。高頻信號(hào)傳輸時(shí),信號(hào)波長(zhǎng)相對(duì)傳輸線較短,信號(hào)在傳輸線終端會(huì)形成反射波,干擾原信號(hào),所以需要在傳輸線末端加終端電阻,使信號(hào)到達(dá)傳輸線末端后不反射。對(duì)于低頻信號(hào)則不用。在長(zhǎng)線信號(hào)傳輸時(shí),一般為了避免信號(hào)的反射和回波,也需要在接收端接入終端匹配電阻。
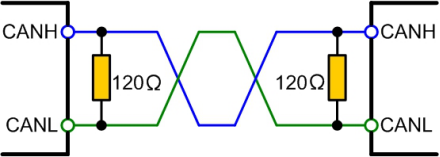
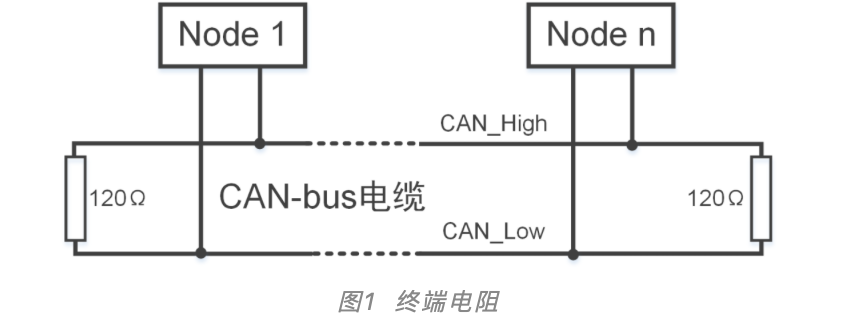
其終端匹配電阻值取決于電纜的阻抗特性,與電纜的長(zhǎng)度無(wú)關(guān)。RS-485/RS-422 一般采用雙絞線(屏蔽或非屏蔽)連接,終端電阻一般介于100至140Ω之間,典型值為120Ω。在實(shí)際配置時(shí),在電纜的兩個(gè)終端節(jié)點(diǎn)上,即最近端和最遠(yuǎn)端,各接入一個(gè)終端電阻,而處于中間部分的節(jié)點(diǎn)則不能接入終端電阻,否則將導(dǎo)致通訊出錯(cuò)。
CAN終端電阻的作用原理
CAN總線終端電阻的作用有兩個(gè):
一、提高抗干擾能力,確保總線快速進(jìn)入隱性狀態(tài)。
二、提高信號(hào)質(zhì)量。
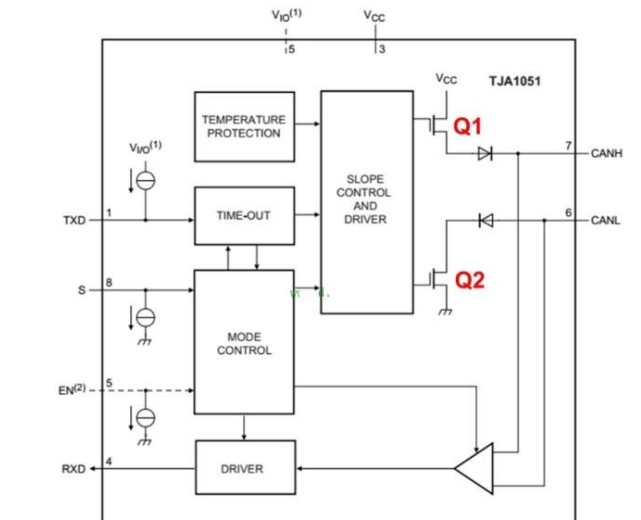
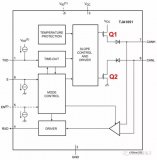
總線顯性時(shí),收發(fā)器內(nèi)部Q1、Q2導(dǎo)通,CANH、CANL之間壓差;隱性時(shí),Q1、Q2截止,CANH、CANL處于無(wú)源狀態(tài),壓差為0。
總線若無(wú)負(fù)載,隱性時(shí)電阻阻值很大,外部的干擾只需要極小的能量即可令總線進(jìn)入顯性(一般的收發(fā)器顯性門限最小電壓僅500mV)。為提升總線隱性時(shí)的抗干擾能力,可以增加一個(gè)差分負(fù)載電阻,且阻值盡可能小,以杜絕大部分能量的影響。然而,為了避免需要過(guò)大的總線才能進(jìn)入顯性,阻值也不能過(guò)小。
確保快速進(jìn)入隱性狀態(tài)
在顯性狀態(tài)期間,總線的寄生電容會(huì)被,而在恢復(fù)到隱性狀態(tài)時(shí),這些電容需要放電。如果CANH、CANL之間沒(méi)有放置任何阻性負(fù)載,電容只能通過(guò)收發(fā)器內(nèi)部的差分電阻放電。我們?cè)谑瞻l(fā)器的CANH、CANL之間加入一個(gè)220PF的電容進(jìn)行模擬試驗(yàn),位速率為500kbit/s,波形如圖2、圖3。
圖2
圖3
從圖3看出,顯性恢復(fù)到隱性的時(shí)間長(zhǎng)達(dá)1.44μS,在點(diǎn)較高的情況下勉強(qiáng)能夠通信,若通信速率更高,或寄生電容更大,則很難保證通信正常。
為了讓總線寄生電容快速放電,確保總線快速進(jìn)入隱性狀態(tài),需要在CANH、CANL之間放置一個(gè)負(fù)載電阻。增加一個(gè)60Ω的電阻后,波形如圖4、圖5。從圖中看出,顯性恢復(fù)到隱性的時(shí)間縮減到128nS,與顯性建立時(shí)間相當(dāng)。
圖4
圖5
CAN總線及其終端配置方法
CAN是控制器局域網(wǎng)絡(luò)(ControllerArea Network, CAN)的簡(jiǎn)稱,是國(guó)際上應(yīng)用最廣泛的現(xiàn)場(chǎng)總線之一。當(dāng)前,CAN總線協(xié)議已經(jīng)成為汽車計(jì)算機(jī)控制系統(tǒng)和嵌入式工業(yè)控制局域網(wǎng)的標(biāo)準(zhǔn)總線。
CAN有效支持分布式控制或?qū)崟r(shí)控制的串行通信網(wǎng)絡(luò)。較之許多RS-485基于R線構(gòu)建的分布式控制系統(tǒng)而言,基于CAN總線的分布式控制系統(tǒng)在以下方面具有明顯的優(yōu)越性:
1、網(wǎng)絡(luò)各節(jié)點(diǎn)之間的數(shù)據(jù)通信實(shí)時(shí)性強(qiáng)
CAN控制器工作于多種方式,網(wǎng)絡(luò)中的各節(jié)點(diǎn)都可根據(jù)總線訪問(wèn)優(yōu)先權(quán)(取決于報(bào)文標(biāo)識(shí)符)采用無(wú)損結(jié)構(gòu)的逐位仲裁的方式競(jìng)爭(zhēng)向總線發(fā)送數(shù)據(jù),且CAN協(xié)議廢除了站地址編碼,而代之以對(duì)通信數(shù)據(jù)進(jìn)行編碼,這可使不同的節(jié)點(diǎn)同時(shí)接收到相同的數(shù)據(jù),這些特點(diǎn)使得CAN總線構(gòu)成的網(wǎng)絡(luò)各節(jié)點(diǎn)之間的數(shù)據(jù)通信實(shí)時(shí)性強(qiáng),并且容易構(gòu)成冗余結(jié)構(gòu),提高系統(tǒng)的可靠性和系統(tǒng)的靈活性。而利用RS-485只能構(gòu)成主從式結(jié)構(gòu)系統(tǒng),通信方式也只能以主站輪詢的方式進(jìn)行,系統(tǒng)的實(shí)時(shí)性、可靠性較差;
2、縮短了開(kāi)發(fā)周期
CAN總線通過(guò)CAN收發(fā)器接口的兩個(gè)輸出端CANH和CANL與物理總線相連,而CANH端的狀態(tài)只能是高電平或懸浮狀態(tài),CANL端只能是低電平或懸浮狀態(tài)。這就保證不會(huì)在出現(xiàn)在RS-485網(wǎng)絡(luò)中的現(xiàn)象,即當(dāng)系統(tǒng)有錯(cuò)誤,出現(xiàn)多節(jié)點(diǎn)同時(shí)向總線發(fā)送數(shù)據(jù)時(shí),導(dǎo)致總線呈現(xiàn)短路,從而損壞某些節(jié)點(diǎn)的現(xiàn)象。而且CAN節(jié)點(diǎn)在錯(cuò)誤嚴(yán)重的情況下具有自動(dòng)關(guān)閉輸出功能,以使總線上其他節(jié)點(diǎn)的操作不受影響,從而保證不會(huì)出現(xiàn)象在網(wǎng)絡(luò)中,因個(gè)別節(jié)點(diǎn)出現(xiàn)問(wèn)題,使得總線處于“死鎖”狀態(tài)。而且,CAN具有的完善的通信協(xié)議可由CAN控制器芯片及其接口芯片來(lái)實(shí)現(xiàn),從而大大降低系統(tǒng)開(kāi)發(fā)難度,縮短了開(kāi)發(fā)周期,這些是僅有電氣協(xié)議的RS-485所無(wú)法比擬的。
二、CAN的報(bào)文格式
在總線中傳送的報(bào)文,每幀由7部分組成。CAN協(xié)議支持兩種報(bào)文格式,其唯一的不同是標(biāo)識(shí)符(ID)長(zhǎng)度不同,標(biāo)準(zhǔn)格式為11位,擴(kuò)展格式為29位。
在標(biāo)準(zhǔn)格式中,報(bào)文的起始位稱為幀起始(SOF),然后是由11位標(biāo)識(shí)符和遠(yuǎn)程發(fā)送請(qǐng)求位 (RTR)組成的仲裁場(chǎng)。RTR位標(biāo)明是數(shù)據(jù)幀還是請(qǐng)求幀,在請(qǐng)求幀中沒(méi)有數(shù)據(jù)字節(jié)。
控制場(chǎng)包括標(biāo)識(shí)符擴(kuò)展位(IDE),指出是標(biāo)準(zhǔn)格式還是擴(kuò)展格式。它還包括一個(gè)保留位 (ro),為將來(lái)擴(kuò)展使用。它的最后四個(gè)位用來(lái)指明數(shù)據(jù)場(chǎng)中數(shù)據(jù)的長(zhǎng)度(DLC)。數(shù)據(jù)場(chǎng)范圍為0~8個(gè)字節(jié),其后有一個(gè)檢測(cè)數(shù)據(jù)錯(cuò)誤的循環(huán)冗余檢查(CRC)。
應(yīng)答場(chǎng)(ACK)包括應(yīng)答位和應(yīng)答分隔符。發(fā)送站發(fā)送的這兩位均為隱性電平(邏輯1),這時(shí)正確接收?qǐng)?bào)文的接收站發(fā)送主控電平(邏輯0)覆蓋它。用這種方法,發(fā)送站可以保證網(wǎng)絡(luò)中至少有一個(gè)站能正確接收到報(bào)文。
報(bào)文的尾部由幀結(jié)束標(biāo)出。在相鄰的兩條報(bào)文間有一很短的間隔位,如果這時(shí)沒(méi)有站進(jìn)行總線存取,總線將處于空閑狀態(tài)。
CAN通信數(shù)據(jù)幀的結(jié)構(gòu)
三、CAN總線終端配置方法
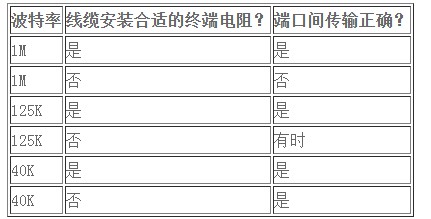
CAN總線的測(cè)試和使用過(guò)程中,為了保證信號(hào)反射不至導(dǎo)致通訊失敗,傳輸線上必須添加匹配終端。有多種方法配置CAN硬件,主要取決于你硬件的物理層:高速,低速,單線還是軟件可配的。
使用CAN組成網(wǎng)絡(luò)示例
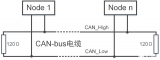
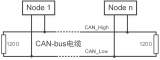
1、高速CAN
對(duì)于高速CAN,一對(duì)信號(hào)線的每根線(CAN_H和CAN_L)都必須添加120歐姆的匹配電阻,這是因?yàn)镃AN總線兩個(gè)方向都有數(shù)據(jù)流。具體做法就是在每一個(gè)CAN終端(多個(gè)設(shè)備時(shí)只需在最終端的設(shè)備)的CAN_H和CAN_L上跨接一個(gè)120歐姆電阻(實(shí)際操作時(shí)我試過(guò)120歐姆左右的都可用)。
2、低速CAN
對(duì)于低速CAN,網(wǎng)絡(luò)上每個(gè)設(shè)備的每條數(shù)據(jù)線都需要一個(gè)終端電阻:R(RTH)接在CAN_H上,R(RTL)接在CAN_L上,每個(gè)電阻的阻值需要參考低速CAN的使用手冊(cè)進(jìn)行計(jì)算。
3、單線CAN
一般單線CAN(如NI)硬件內(nèi)置一個(gè)9.9K歐姆的負(fù)載電阻,這就是網(wǎng)絡(luò)要求的負(fù)載阻值,不需額外的電阻。
4、軟件配置
軟件可配置CAN硬件可以通過(guò)軟件來(lái)配置設(shè)備是工作在高速下,低速下或是單線接口。所需的終端電阻取決于被配置在哪個(gè)物理層。
結(jié)語(yǔ)
關(guān)于can總線的相關(guān)介紹就到這了,如有不足之處歡迎指正。
-
電阻
+關(guān)注
關(guān)注
86文章
5557瀏覽量
172502 -
CAN總線
+關(guān)注
關(guān)注
145文章
1955瀏覽量
130965
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
CAN總線終端電阻的作用
CAN總線不加終端電阻會(huì)怎樣?
CAN總線終端電阻
CAN總線終端電阻
怎樣檢測(cè)CAN總線上的終端電阻阻值?
CAN總線終端電阻為什么是120Ω
CAN總線不加終端電阻時(shí)的影響

CAN總線終端電阻添加要求
CAN總線不加終端電阻,會(huì)怎么樣?

CAN總線通訊中終端電阻的作用





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論