") 通過(guò)利用步進(jìn)驅(qū)動(dòng)器實(shí)現(xiàn)攝像機(jī)調(diào)焦系統(tǒng)的設(shè)計(jì)
通過(guò)利用步進(jìn)驅(qū)動(dòng)器實(shí)現(xiàn)攝像機(jī)調(diào)焦系統(tǒng)的設(shè)計(jì)
當(dāng)攝影鏡頭拍攝運(yùn)動(dòng)的物體時(shí),如果運(yùn)動(dòng)軌跡已知,攝影鏡頭必須對(duì)焦距進(jìn)行調(diào)節(jié),從而調(diào)整目標(biāo)的像點(diǎn)的位置,使得目標(biāo)始終位于焦點(diǎn)上,達(dá)到實(shí)時(shí)拍攝的 目標(biāo),傳統(tǒng)變焦大多是利用機(jī)械裝置完成的,比如凸輪機(jī)構(gòu),齒條機(jī)構(gòu);但是由于機(jī)械加工工藝復(fù)雜,其精度、平穩(wěn)性和靈活性都難以滿足要求,為此本系統(tǒng)利用步進(jìn)電機(jī)帶動(dòng)攝像機(jī)完成變焦,由于步進(jìn)點(diǎn)機(jī)精確地按照步進(jìn)角轉(zhuǎn)動(dòng),并且由DSP進(jìn)行控制,從而滿足了以上機(jī)械裝置無(wú)法完成地性能要求。實(shí)驗(yàn)結(jié)果表明,本系統(tǒng) 調(diào)焦曲線與理想曲線擬合度較好,拍攝已知運(yùn)動(dòng)軌跡的目標(biāo),達(dá)到了滿意效果。
1 調(diào)焦系統(tǒng)設(shè)計(jì)思想
在光學(xué)系統(tǒng)中,采用一組物鏡,調(diào)節(jié)軸向位移,物鏡光學(xué)系統(tǒng)物象關(guān)系是:
X′=f2 / X
其中 X′—— 像距(目標(biāo)像平面到主焦平面的距離);
X —— 物距(目標(biāo)距離);
f —— 光學(xué)系統(tǒng)焦距 f=常量,像距X′與物距X成反比關(guān)系。
利用已知的攝影調(diào)焦曲線確定步進(jìn)電機(jī)轉(zhuǎn)動(dòng)所需的步數(shù)和時(shí)間坐標(biāo)關(guān)系,存入F240數(shù)據(jù)存儲(chǔ)器中,利用F240運(yùn)算速度快、片載FLASH存儲(chǔ)器大 (16K字)的特點(diǎn),準(zhǔn)確控制步進(jìn)電機(jī)控制器驅(qū)動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn),通過(guò)機(jī)械裝置實(shí)現(xiàn)攝影鏡頭焦距按照規(guī)定的曲線變化,從而實(shí)現(xiàn)實(shí)時(shí)拍攝運(yùn)動(dòng)物體的功能。
2 硬件設(shè)計(jì)部分
2.1步進(jìn)驅(qū)動(dòng)器UP-4HB03M簡(jiǎn)介
UP-4HB03M是北京聯(lián)太工貿(mào)有限公司生產(chǎn)的專(zhuān)用步進(jìn)電機(jī)驅(qū)動(dòng)器,4HBO3M適用于兩相六出頭混合式及四相混合式步進(jìn)電機(jī),PWM恒流控制方 式;可選擇半步(四相八拍)或者16細(xì)分兩種工作方式;驅(qū)動(dòng)電流為0.3A連續(xù)可調(diào),并且具有自動(dòng)半流鎖定功能;脫機(jī)控制及其相位檢測(cè)功能;所有控制信號(hào) 與功率驅(qū)動(dòng)部分光電隔離;散熱外殼與驅(qū)動(dòng)器內(nèi)部完全電絕緣。
2.2 TMS320F240簡(jiǎn)介
TMS320F240(以下簡(jiǎn)稱F240)由DSP內(nèi)核和片內(nèi)外設(shè)組成。由于DSP內(nèi)核具有較快的計(jì)算和響應(yīng)處理速度,可以應(yīng)付高速應(yīng)用的要 求,同時(shí)也為控制軟件的設(shè)計(jì)提供了更加有力的支持,使控制系統(tǒng)能夠完成更加復(fù)雜的功能、實(shí)現(xiàn)更好的控制效果。同時(shí)TMS320F240具有豐富的片內(nèi)外 設(shè),包括16路10位A/D轉(zhuǎn)換器、多個(gè)可編程的多路復(fù)用I/O引腳、硬件UART以及SPI總線等。特別是TMS320F240片內(nèi)設(shè)置了一個(gè)事件管理 器(EPA),可以提供6路全比較PWM通道,能方便地實(shí)現(xiàn)各種PWM波形的發(fā)生。這里使用F240主要是考慮F240速度快以及有豐富的I/O引腳資 源;程序燒寫(xiě)方便,利于更新曲線坐標(biāo)以及修改程序;性價(jià)比較高等因素。
2.3 硬件設(shè)計(jì)
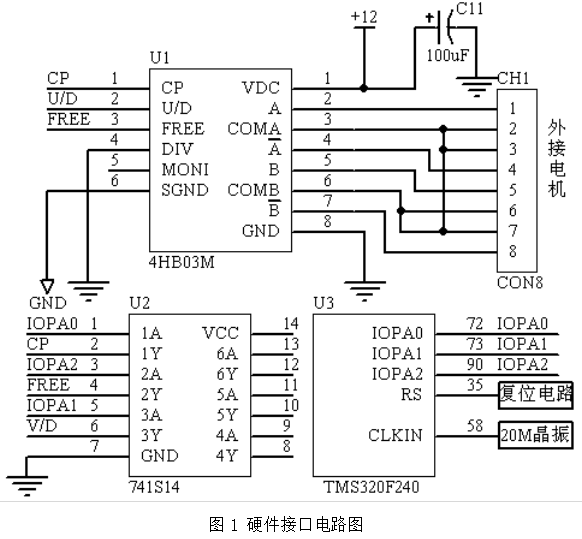
本系統(tǒng)的硬件接口電路如圖1所示,74ls14為反相器,接到DSP的I/O口以提高其驅(qū)動(dòng)能力,CH1是一個(gè)八腳的插頭,用于外接步進(jìn)機(jī)的各項(xiàng)繞 組。步進(jìn)電機(jī)以及攝影鏡頭部分從略。工作過(guò)程如下:首先獲得攝影調(diào)焦曲線,利用MATLAB軟件,得出時(shí)間位移坐標(biāo),再換算成步進(jìn)電機(jī)轉(zhuǎn)動(dòng)所需的步數(shù)時(shí)間 坐標(biāo),以數(shù)組的行式保存下來(lái)。在F240的數(shù)據(jù)存儲(chǔ)器中開(kāi)辟空間存儲(chǔ)步數(shù)時(shí)間數(shù)組,利用F240定時(shí)器完成計(jì)時(shí),I/O口輸出相應(yīng)寬度的脈沖信號(hào),驅(qū)動(dòng)步 進(jìn)電機(jī)驅(qū)動(dòng)器UP-4HB03M,其中CP為步進(jìn)脈沖輸入端;FREE為脫機(jī)端,高電平有效,F(xiàn)REE=1時(shí),電機(jī)處于釋放狀態(tài);V/D為方向控制端,高 低電平分別控制電機(jī)正反轉(zhuǎn)。
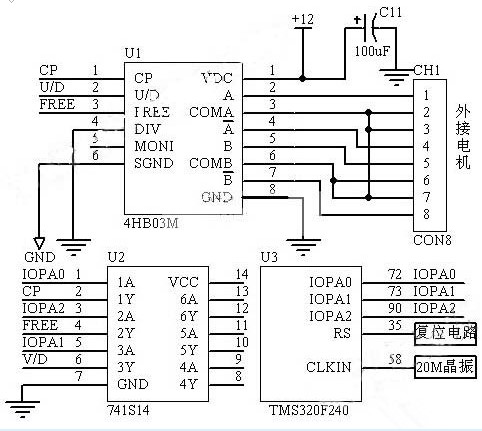
圖1 硬件接口電路圖
3 軟件設(shè)計(jì):
由于電機(jī)的運(yùn)行和轉(zhuǎn)動(dòng)步數(shù)以及兩步之間間隔時(shí)間有關(guān)系,故采用計(jì)時(shí)器計(jì)時(shí)的方法來(lái)計(jì)算時(shí)間,F(xiàn)240初始化程序如下:
void Initcpu(void) //初始化F240程序
{ *WDCR=0x6f; // 禁止自帶的看門(mén)狗功能;
*CKCR1=0x69; // 外部輸入晶振為20MHZ,F(xiàn)240工作在20MHZ;
*CKCR0=0xc3; // 系統(tǒng)時(shí)鐘為10MHZ;
*SYSCR=0x4000; } // F240輸出頻率CLKOUT=IOPC1(I/O管腳);
F240初始化后,計(jì)時(shí)器的基本計(jì)時(shí)時(shí)間為0.1?s,考慮到F240定時(shí)器是16位計(jì)數(shù)器,這難以滿足計(jì)算長(zhǎng)時(shí)間的需求,所以采用通 過(guò)計(jì)算進(jìn)入定時(shí)器中斷的次數(shù)來(lái)計(jì)算長(zhǎng)時(shí)間的方法。例如設(shè)置定時(shí)器周期寄存器值為800即*T1PR=800,那么進(jìn)一次定時(shí)器中斷時(shí)間為800*0.1= 80?s如果計(jì)時(shí)為1s的話,則只需進(jìn)12500次中斷即可,以此類(lèi)推;故定義的數(shù)組內(nèi)容表示如下:
int table[ ]= { 25,800,255, //第1行
。 . 。 . 。 . } //第n行
其中25為電機(jī)步數(shù);800為定時(shí)器周期寄存器值;255每?jī)刹介g所要進(jìn)入定時(shí)器中斷的次數(shù)。實(shí)現(xiàn)準(zhǔn)確地控制步進(jìn)電機(jī)控制器關(guān)鍵在于由F240 I/O口產(chǎn)生規(guī)定的脈沖信號(hào),提供給步進(jìn)電機(jī)控制器從而驅(qū)動(dòng)步進(jìn)電機(jī)正確轉(zhuǎn)動(dòng),程序中包括F240初始化、電機(jī)正轉(zhuǎn)、等待、電機(jī)反轉(zhuǎn)幾個(gè)程序模塊。程序流 程圖如圖2所示:
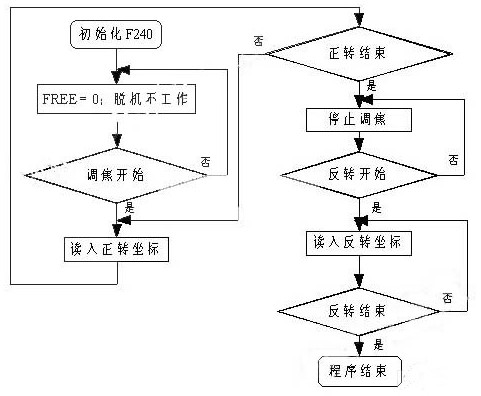
圖2 程序流程圖
以下是實(shí)現(xiàn)電機(jī)正轉(zhuǎn)的程序。程序中變量解釋?zhuān)簊tep:用于存儲(chǔ)數(shù)組中電機(jī)步數(shù);every step:用于存儲(chǔ)數(shù)組中每?jī)刹介g所要進(jìn)定時(shí)中斷的次數(shù);flag:數(shù)組行數(shù)標(biāo)志(程序假設(shè)需正轉(zhuǎn)36組)。
void interrupt INT2_ISR()
{ while (*EVIVRA==0x0027) //是否是定時(shí)器中斷
{ if(flag<36) //用來(lái)完成正轉(zhuǎn)
{
if (steptotal==step) //是否走完數(shù)組每行規(guī)定的步數(shù)
{ flag++; //數(shù)組行標(biāo)志加1
steptotal=0; //電機(jī)轉(zhuǎn)動(dòng)步數(shù)清零
step=table[++j]; //更新電機(jī)運(yùn)行步數(shù)數(shù)據(jù)
*T1PR=table[++j]; //更新定時(shí)器定時(shí)周期
everystep=table[++j]; //更新需要進(jìn)入定時(shí)器中斷次數(shù)
*T1CNT=0; } //從零開(kāi)始計(jì)時(shí),啟動(dòng)定時(shí)器
i++; //循環(huán)標(biāo)志位加1
if(i==1) *PADATDIR=0xff05; // 提供下降沿,正轉(zhuǎn),不脫機(jī)
else{ if (i==everystep)
{ i=0;
steptotal++; } //電機(jī)每轉(zhuǎn)一步標(biāo)志位加1
else
*PADATDIR=0xff04; //CP腳為高電平為產(chǎn)生下降沿準(zhǔn)備,正轉(zhuǎn),不脫機(jī)
}
*IMR=0x02; //開(kāi)定時(shí)器中斷
enable(); //開(kāi)啟F240總中斷
}
}
4 實(shí)驗(yàn)結(jié)果及其注意事項(xiàng)
電機(jī)轉(zhuǎn)動(dòng)的步數(shù)和時(shí)間坐標(biāo)都是由主機(jī)端通過(guò)MATLAB仿真取得的,因此實(shí)際調(diào)焦曲線的與理想曲線的擬合程度大大提高了;步進(jìn)電機(jī)控制器采用四相八拍運(yùn)行 方式,并且由DSP進(jìn)行控制,步進(jìn)機(jī)精確地按照步進(jìn)角(0.9度)轉(zhuǎn)動(dòng)。實(shí)際應(yīng)用該調(diào)焦系統(tǒng)調(diào)整攝影鏡頭,拍攝運(yùn)動(dòng)軌跡已知的目標(biāo),達(dá)到了滿意的效果。
定時(shí)器時(shí)間的準(zhǔn)確計(jì)算對(duì)高精度地測(cè)量一些物理量是非常重要的。當(dāng)需要定時(shí)器計(jì)算的時(shí)間比較長(zhǎng)時(shí),定時(shí)器計(jì)數(shù)還不夠,這時(shí)就需要利用定時(shí)器自身的中斷,即短時(shí)間定時(shí)一到就進(jìn)入定時(shí)器中斷服務(wù)子程序,利用進(jìn)入的次數(shù)來(lái)達(dá)到計(jì)時(shí)的目的。
5 結(jié)束語(yǔ)
本文對(duì)基于DSPTMS320F240利用步進(jìn)驅(qū)動(dòng)器UP-4HB03M控制步進(jìn)電機(jī)進(jìn)行了研究,改進(jìn)了傳統(tǒng)的工程中調(diào)焦方式,精度大大提高, 經(jīng)測(cè)試系統(tǒng)運(yùn)行穩(wěn)定,由于DSP操作方便,而且采用C語(yǔ)言方式編寫(xiě),易于日后的代碼修改和程序移植。
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
53文章
8268瀏覽量
146810 -
攝像機(jī)
+關(guān)注
關(guān)注
3文章
1617瀏覽量
60201 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
151文章
3118瀏覽量
147717
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
網(wǎng)絡(luò)攝像機(jī)是什么意思
網(wǎng)絡(luò)攝像機(jī)是什么?
攝像機(jī)同步方式
PWM電流驅(qū)動(dòng)的雙極低功耗步進(jìn)電機(jī)驅(qū)動(dòng)器BD60223FP
礦用攝像機(jī)嵌入式CAN總線遠(yuǎn)程控制有什么用?
網(wǎng)絡(luò)攝像機(jī)與模擬攝像機(jī)的區(qū)別是什么
MS41908M 網(wǎng)絡(luò)攝像機(jī)·監(jiān)控攝像機(jī)用鏡頭驅(qū)動(dòng)芯片(內(nèi)置光圈控制)
5V攝像機(jī)鏡頭驅(qū)動(dòng),小云臺(tái)驅(qū)動(dòng),低噪步進(jìn)電機(jī)驅(qū)動(dòng)芯片GC6209,應(yīng)用于攝像機(jī) 機(jī)器人等產(chǎn)品中
基于TMS320F240控制步進(jìn)電機(jī)的調(diào)焦系統(tǒng)設(shè)計(jì)
利用單片機(jī)實(shí)現(xiàn)嵌入式攝像機(jī)二進(jìn)制命令配置系統(tǒng)的設(shè)計(jì)
將步進(jìn)電機(jī)驅(qū)動(dòng)器應(yīng)用在監(jiān)控攝像機(jī)中
基于DSP和UP-4HB03M驅(qū)動(dòng)器實(shí)現(xiàn)步進(jìn)電機(jī)調(diào)焦系統(tǒng)的設(shè)計(jì)
ADDI9023:CCD攝像機(jī)數(shù)據(jù)表的垂直驅(qū)動(dòng)器

MS41908M—網(wǎng)絡(luò)攝像機(jī)·監(jiān)控攝像機(jī)用鏡頭驅(qū)動(dòng)芯片(內(nèi)置光圈控制)
MS41908M應(yīng)用于網(wǎng)絡(luò)攝像機(jī)·監(jiān)控攝像機(jī)用鏡頭驅(qū)動(dòng)芯片





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論