 基于嵌入式PC與EtherCAT技術實現步進電機運動控制系統的設計
基于嵌入式PC與EtherCAT技術實現步進電機運動控制系統的設計
該系統為某主機電控系統,完成對光束的準直過程中的參數診斷、數據采集、閉環控制等實時控制功能以及與主控系統的通信功能。步進電機以性價比高,實時效果好,不需要昂貴的反饋系統著稱,該系統中采用了一千多個步進電機來實現對光束的準直。神光原型采用控制卡控制大量步進電機,控制卡控制步進電機沒有負載位置的反饋信號,實時效果差,故障定位非常困難;試驗中采用西門子PLC(Programmable Logic Controller,可編程邏輯控制器)控制這些電機可靠性好,但控制少量步進電機時比較簡單,控制大量步進電機時時序復雜,接線復雜,成本高,調試困難。最終方案采用德國Beckhoff公司的自動化產品,如嵌入式控制器,現場總線端子、步進電機總線端子等設備控制電機,該方案具有成本較低、操作簡便、占用空間小等優點,也提高了系統的性能和可靠性,現已通過試驗和評審進入調試階段。
1 、步進電機運動控制系統總體設計思想
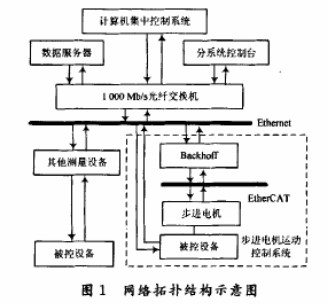
電控系統的總體設計思想為:控制系統設計應分別滿足現場獨立控制與遠程集中控制,各子系統具備對系統各類設備的狀態進行實時監測的功能,包括故障定位檢測和報警;具備對系統各設備進行參數設置、參數采集、存儲、處理等功能。主控計算機位于主控制室內,通過1 000 Mb/s光纖網絡與分控計算機通信,分控計算機通過光纖交換機與控制設備采用工業以太網通信,其網絡拓撲圖如圖1所示。
2、 步進電機運動控制系統設計方案
2.1 倍福步進電機總體控制架構設計
采用基于嵌入式PC的模塊化運動控制器,型號為CX1020,運動控制器本身集成雙Ethernet接口,其中一個向上連接到現場工業以太網,接受運動控制的調用指令,另一個可以作為本地調試的網絡接口。運動控制器、運動控制網絡接口部件、步進電機驅動器通過硬實時的超高速以太網EtherCAT(Ethernet for Controland Automation Technology)構成運動控制網絡系統,采用EtherCAT取代以往的現場總線傳輸技術,可以顯著減少控制系統CPU的負荷,而且無需任何智能主站卡,適合集中式與分布式控制體系。
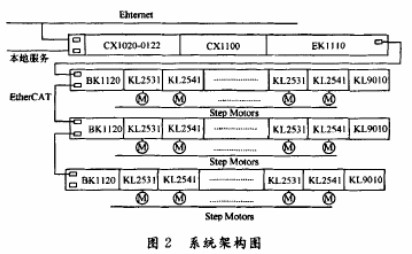
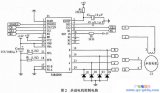
末端端子與底層EtherCAT總線耦合器端子BK1120相連,在本機架內總線耦合器通過K-Bus總線接口連接電機驅動總線端子KL2531和KL2541,步進電機直接連接在這兩個端子上,如果使用KL2541端子,還需要在機架上安設數字輸入端子KL1002,用于接人步進電機限位信號,最后在機架末端安放BK9010總線終端端子。
每級機架上總線耦合器BK1120的另一網絡端口向下依次級聯另一機架上的總線耦合器,最后從控制器到各級機架網絡節點形成一個總線型的控制網絡拓撲結構。KL2531和KL2541是步進電機總線端子,提供一路20 kHz的脈沖,可以各帶一個步進電機。步進電機總體控制架構如圖2所示。
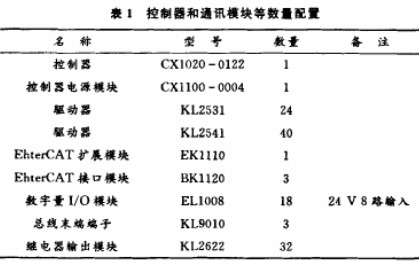
具體的控制器和通訊模塊等數量配置見表1。
2.3 重要器件概述
運動控制器采用基于嵌入式PC的模塊化運動控制器,型號為CX1020,處理器為Intel Celeron MULV1 GHz,內存為256 MB/512 MB/1 024 MB,操作系統為Microsoft Windows XP Embedded或MicrosoftWindows CE。該運動控制器應用于中等規模的控制系統中,自帶兩個工業以太網EtherCAT接口,其中一個向上連接到現場工業以太網,接受運動控制的調用指令,另一個可以作為本地調試的網絡接口。軟件開發平臺TwinCAT PLC(The Windows Control and Automation Technology PLC)使用符合采用IEC61131-3的編程語言編程,運動控制功能庫符合PLCopen標準,具有通用的、開放式軟件接口。
EtherCAT是與PC控制技術相匹配的通訊系統,以Beckhoff開發的實時工業以太網解決方案,其特點是性能優越、操作簡便。該技術采用標準的以太網幀,支持因特網技術。以太網可以直接到達端子,以太網過程接口可以從2位擴展到64個字節;350μs處理12 000個數字量I/O;100μs處理100個電機軸等。EtherCAT適合于多種網絡拓撲結構,可用于設備控制、機器人、嵌入式系統、樓宇自動化、運輸系統等。
步進電機歷史悠久,爆發力好,便于控制并且扭矩大,在控制領域內占有相當重要的地位。步進電機是一種將電脈沖轉化為角位移的執行機構。當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度(稱為“步距角”)。它的旋轉是以固定的角度一步一步運行的。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的。同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。我們采用北京四通的兩相混合式步進電機,型號為28BYG250C,步距角為0.9/1.8,靜態相電流0~7 A,保持轉矩0.065 N/m,定位轉矩0.005 N/m,轉動慣量12 gcm2。
KL2531和KL2541是集成的步進電機控制器,是Beckhoff產品中用于傳統驅動器高性價比的產品。KL2531和KL2541均可以提供和小型伺服驅動器相近似的性能,提供了最大64個最大中間步,并提供一路20 kHz的脈沖,一路脈沖驅動一臺步進電機。KL2531總線端子用于較低性能場合,該端子是為簡單的整合到24 V直流電壓控制系統而設計的,每相尖峰電流1.5 A。KL2541可以提供高達5 A的最大電流,能夠驅動扭矩高達5 Nm的步進電機。端子的輸出階段,有以溫度過高警報并且關斷的形式的過載保護,同時還有短路保護功能,診斷數據可以通過控制器的過程映像區來取得,自帶兩路高速輸入通道,快速準確記錄當前位置,或實現急停功能。輸出脈沖可以通過“EnableBit”啟動,電機的電流可以通過參數值來進行設定。對電機的配置可以通過軟件來完成,這樣總線端子能容易的進行更換,而且參數可以存儲或者被轉移到下一個工程,無需通過電位器或者指撥開關來設定。
3 、軟件配置
Beckhoff公司基于PC平臺的實時核技術可以將安裝了Microsoft公司WindowsNT/2000/XP/CE.NET/XP嵌入式操作系統的普通PC和Beckhoff公司的嵌入式控制系統CX1000改造為具有實時能力的PC控制器。Beckhoff公司基于PC平臺的實時核技術通過與3S公司提供的TwinCAT編程環境相結合,以及系統管理器對Beckhoff公司各種I/O設備的驅動程序相結合,使TwinCAT CP、I/O、PLC、PTP和NCI構成了一套完整的基于PC平臺的實時控制器解決方案。
TwinCAT軟件具備四套獨立運行的PLC實時核,每套PLC都可分配4個任務,并且可以將最小任務周期時間設置為50μs(取決于所使用的CPU處理能力)。TwinCAT PLC控制是用于PLC的完整開發環境,所使用的編輯器和調試功能建立在高級編程語言開發環境基礎之上,在TwinCAT PLC中可以使用IEC61131-3的五種不同語言創建PLC程序。TwinCAT實時任務運行的載荷率(TwinCAT實時任務運行時間與操作系統運行時間的比率)可調范圍為10%~90%。并在此基礎上,將伺服控制中的PTP、NCI和HMI技術拓展到系統管理器和TwinCAT編程環境中。
4 、結 語
該設計方案已經通過實驗階段進入正式調試階段,在該過程中,可以發現倍福產品有很多優點,占用的空間小。現場總線端子的主要特點是性價比高,質量可靠,結構緊湊,堅固耐用,而且安裝和接線非常方便。EtherCAT技術具有高度的通用性,基于EtherCAT的系統可以大大縮短研發速度。
責任編輯:gt
-
嵌入式
+關注
關注
5089文章
19170瀏覽量
306800 -
plc
+關注
關注
5016文章
13376瀏覽量
464705 -
步進電機
+關注
關注
151文章
3118瀏覽量
147717
發布評論請先 登錄
相關推薦
基于單片機的電機運動控制系統設計
實現步進電機運動
使用基于PC的控制軟件和單電纜技術簡化運動控制系統設計并降低伺服電機成本
基于PC的步進電機三軸聯動控制系統研究

基于Linux和QT的簡便步進電機控制界面設計與實現





 工商網監
工商網監
評論