") PCC 的多任務(wù)處理原理及在自動(dòng)校直切斷機(jī)中的應(yīng)用
PCC 的多任務(wù)處理原理及在自動(dòng)校直切斷機(jī)中的應(yīng)用
前言
校直切斷機(jī)是用于將鋼筋校直并切斷成設(shè)定長(zhǎng)度的設(shè)備。原有設(shè)備其校直速度僅30m/min ,隨著建筑行業(yè)的不斷發(fā)展,對(duì)校直切斷機(jī)的生產(chǎn)效率和自動(dòng)化程度提出了越來越高的要求。由上海交通大學(xué)和錫山市蕩口通用機(jī)械廠聯(lián)合研制的高速自動(dòng)校直切斷機(jī)其校直速度可達(dá)120 m/min ,生產(chǎn)效率和自動(dòng)化程度大為提高該機(jī)適合于盤元、熱軋盤羅、冷軋帶肋鋼筋的調(diào)直與切斷,具有不傷肋、無劃傷、定尺準(zhǔn)、無短節(jié),直線度好,縱徑不扭,強(qiáng)度損失小,操作方便,生產(chǎn)效率高等優(yōu)點(diǎn)。本機(jī)主要由放線盤、調(diào)直機(jī)主機(jī)(雙牽引,鏈條傳動(dòng))液壓切斷機(jī),配電柜、12米料架組成。
1 PCC 的多任務(wù)處理原理
傳統(tǒng)PLC 是單任務(wù)型的,應(yīng)用程序?qū)ο到y(tǒng)來說僅有一個(gè)。PLC主要是指數(shù)字運(yùn)算操作電子系統(tǒng)的可編程邏輯控制器,用于控制機(jī)械的生產(chǎn)過程。也是公共有限公司、電源線車等的名稱縮寫。PLC = Programmable Logic Controller,可編程邏輯控制器,一種數(shù)字運(yùn)算操作的電子系統(tǒng),專為在工業(yè)環(huán)境應(yīng)用而設(shè)計(jì)的。它采用一類可編程的存儲(chǔ)器,用于其內(nèi)部存儲(chǔ)程序,執(zhí)行邏輯運(yùn)算,順序控制,定時(shí),計(jì)數(shù)與算術(shù)操作等面向用戶的指令,并通過數(shù)字或模擬式輸入/輸出控制各種類型的機(jī)械或生產(chǎn)過程。是工業(yè)控制的核心部分。早期的可編程控制器稱作可編程邏輯控制器(Programmable Logic Controller,PLC),它主要用來代替繼電器實(shí)現(xiàn)邏輯控制。隨著技術(shù)的發(fā)展,這種采用微型計(jì)算機(jī)技術(shù)的工業(yè)控制裝置的功能已經(jīng)大大超過了邏輯控制的范圍,因此,今天這種裝置稱作可編程控制器,簡(jiǎn)稱PC。但是為了避免與個(gè)人計(jì)算機(jī)(Personal Computer)的簡(jiǎn)稱混淆,所以將可編程序控制器簡(jiǎn)稱PLC,plc自1966年美國(guó)數(shù)據(jù)設(shè)備公司(DEC)研制出現(xiàn),現(xiàn)行美國(guó),日本,德國(guó)的可編程序控制器質(zhì)量?jī)?yōu)良,功能強(qiáng)大。
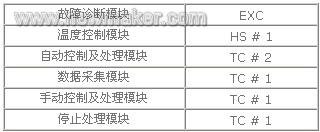
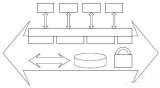
具有多任務(wù)處理能力的PCC 的結(jié)構(gòu)模型如圖1 所示,操作系統(tǒng)內(nèi)核是具有多任務(wù)能力的標(biāo)準(zhǔn)操作系統(tǒng),主要為多任務(wù)應(yīng)用程序提供資源管理。PCC 軟件包系統(tǒng)允許將用戶任務(wù)(相對(duì)獨(dú)立的應(yīng)用程序模塊)設(shè)定為高速任務(wù)級(jí)別(HS 一Task Class)和普通任務(wù)級(jí)(Task Class)。高速任務(wù)級(jí)和普通任務(wù)級(jí)又可相應(yīng)劃分為如下共8 個(gè)任務(wù)級(jí):HS 一Task Classl ~HS 一Task Class4、Task Classl~Task Class4 。其執(zhí)行的優(yōu)先級(jí)依次遞減,每個(gè)任務(wù)級(jí)別又可設(shè)定其周期時(shí)間。例如,若Hs 一Task Class2 的周期時(shí)間為50us ,則系統(tǒng)每50us執(zhí)行一次該級(jí)別的任務(wù)模塊。以Task Classl 和Task Class2兩任務(wù)級(jí)別為例的執(zhí)行情況如圖2 所示。多任務(wù)的處理實(shí)際上是先執(zhí)行級(jí)別高的任務(wù),如圖2 中的Task Classl ,其實(shí)際運(yùn)行時(shí)間是4ms ,Task Classl 執(zhí)行完后,再執(zhí)行Task Class2,由于Task Class2 的運(yùn)行時(shí)間是9 ms ,在開始執(zhí)行Task Classl 到下一次執(zhí)行(即周期10 ms)時(shí),Task Class2 還未運(yùn)行完,因Task Classl的優(yōu)先級(jí)別高,所以Task Class2 的執(zhí)行被打斷,而轉(zhuǎn)去執(zhí)行Task Classl,等執(zhí)行完Task Classl后,再轉(zhuǎn)去執(zhí)行Task Class2。圖2 中① 表示的是操作系統(tǒng)時(shí)鐘,圖2 中② 表示的是系統(tǒng)管理所需時(shí)間。系統(tǒng)管理時(shí)間用于對(duì)系統(tǒng)任務(wù)的管理,此時(shí)間不能改變,并以10 ms 的操作系統(tǒng)時(shí)鐘為周期執(zhí)行。
圖1 PCC 結(jié)構(gòu)模型
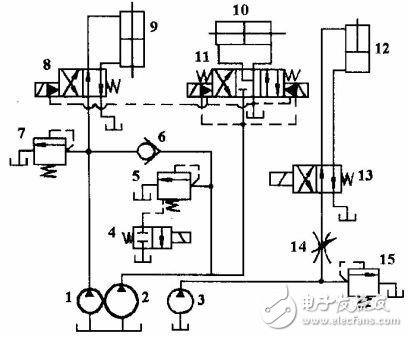
圖2 多任務(wù)執(zhí)行時(shí)序
應(yīng)用程序各任務(wù)模塊級(jí)別的設(shè)定原則是:在滿足實(shí)時(shí)性要求的條件下,應(yīng)盡量降低其級(jí)別,以避免CPU 過載。應(yīng)用程序的各任務(wù)模塊對(duì)CPU 的負(fù)載度按下式計(jì)算
入﹦(Ti/TT)×100%
式中:入― 該任務(wù)對(duì)CPU的負(fù)載度;
Ti ― 該任務(wù)的實(shí)際運(yùn)行時(shí)間(ms) ,可由Pro - filer 軟件測(cè)定;
TT一該任務(wù)所處級(jí)別的周期(ms)。
為保證CPU 可靠運(yùn)行,各任務(wù)的入不應(yīng)超過80 %。此外,為了提高實(shí)時(shí)多任務(wù)的處理能力,PCC 在硬件上采用雙CPU結(jié)構(gòu),一個(gè)負(fù)責(zé)與其它輸人/輸出模塊的通訊,另一個(gè)CPU專門用于處理用戶程序。CPU)是一臺(tái)計(jì)算機(jī)的運(yùn)算核心和控制核心。CPU、內(nèi)部存儲(chǔ)器和輸入/輸出設(shè)備是電子計(jì)算機(jī)三大核心部件。電腦中所有操作都由CPU負(fù)責(zé)讀取指令,對(duì)指令譯碼并執(zhí)行指令的核心部件。其功能主要是解釋計(jì)算機(jī)指令以及處理計(jì)算機(jī)軟件中的數(shù)據(jù)。所謂的計(jì)算機(jī)的可編程性主要是指對(duì)CPU的編程。 CPU由運(yùn)算器、控制器和寄存器及實(shí)現(xiàn)它們之間聯(lián)系的數(shù)據(jù)、控制及狀態(tài)的總線構(gòu)成。差不多所有的CPU的運(yùn)作原理可分為四個(gè)階段:提取(Fetch)、解碼(Decode)、執(zhí)行(Execute)和寫回(Writeback)。
2 PCC 在自動(dòng)校直切斷機(jī)上的應(yīng)用
(l)液壓系統(tǒng)
液壓系統(tǒng)原理如圖3 所示。圖中1 、2 為雙聯(lián)液壓泵。切斷缸9 下行時(shí),電磁鐵8 斷電,高壓小流量泵l 和低壓大流量泵2 同時(shí)對(duì)切斷缸供油,使其快速下行。切斷鋼筋時(shí)負(fù)載壓力升高,單向閥6 閉合,僅由高壓小流量泵l 供油。切斷后,泵2 為跟切缸供油,使跟切缸10 快速跟切及返回。閥4 用于系統(tǒng)短時(shí)不工作時(shí)對(duì)大流量泵卸荷。由于跟切和落料運(yùn)作幾乎同時(shí)進(jìn)行,高速切斷時(shí)兩缸所需流量均較大。
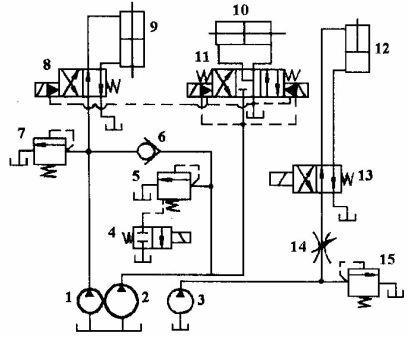
圖3 液壓系統(tǒng)原理圖
1 、2 、3 .電機(jī)4.接觸器系統(tǒng)5.SMC 6 、13.保護(hù)裝置7.隔離變壓器8 、9.開關(guān)電源10.固態(tài)繼電器組 11.電磁鐵組12.接觸器控制線圈組15.CPU 模塊16.DIl35 17.DI439 18.DO435 19.DO720 14.手動(dòng)按鈕組20.光電轉(zhuǎn)換器。
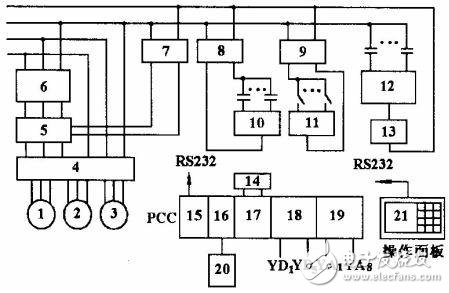
圖4 電氣系統(tǒng)原理圖
(2)PCC及電氣系統(tǒng)
圖3 中電機(jī)1 用于帶動(dòng)校直輥對(duì)鋼筋校直,電機(jī)2 是切斷和跟切液壓系統(tǒng)的驅(qū)動(dòng)電機(jī),3 是落料液壓系統(tǒng)的驅(qū)動(dòng)電機(jī)。中間繼電器組用于PCC 的輸出模塊和液壓閥電磁鐵之間的隔離及信號(hào)放大,接觸器組用于電機(jī)軟啟動(dòng)、停止及速度轉(zhuǎn)換。
PCC 的模塊配置如圖2 所示。CP774 是CPU 模塊,也是PCC的核心模塊。DIl35 是高速計(jì)數(shù)模塊。校直輥在校直鋼筋的同時(shí),帶動(dòng)光電型位置傳感器,位置傳感器的信號(hào)經(jīng)光電轉(zhuǎn)換器放大整形后送入DIl35 模塊,對(duì)被校鋼筋長(zhǎng)度進(jìn)行檢測(cè)。DO435 是直流輸出模塊,其輸出觸點(diǎn)控制中間繼電器,中間繼電器輸出觸點(diǎn)控制電磁閥的動(dòng)作。D0720 是交流輸出模塊,其輸出觸點(diǎn)控制交流接觸器的控制線圈,通過交流接觸器實(shí)現(xiàn)對(duì)三臺(tái)電機(jī)的啟停控制及校直電機(jī)的高低速控制。DI439 是輸人模塊,手動(dòng)按鈕主要用于系統(tǒng)的調(diào)試。PanelWare 是與PCC 配套的人機(jī)交互設(shè)備,通過RS232 通訊電纜與PCC交互信息。
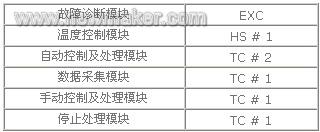
Pane1Ware的人機(jī)交互程序在Pane1Ware Studio 的開發(fā)平臺(tái)上開發(fā),主要是人機(jī)界面的設(shè)計(jì)、輸入設(shè)定參數(shù)、設(shè)定并讀取控制鍵等功能。PCC的編程采用Pg2000語言,Pg2000語言是一種類似C 語言的編程語言,它結(jié)合了C語言和Pascal語言兩者的優(yōu)點(diǎn)。C語言的大部分語法規(guī)則都適用于Pg2000語言。由于PCC 的系統(tǒng)軟件支持多任務(wù)處理,本設(shè)計(jì)中按工藝流程應(yīng)實(shí)現(xiàn)的控制功能將整個(gè)控制過程劃分成14 個(gè)任務(wù)模塊(程序模塊),其中主要有參數(shù)讀取模塊、自動(dòng)切模塊、自動(dòng)跟切模塊、自動(dòng)落料模塊、自動(dòng)停車模塊、速度控制模塊、連續(xù)切控制模塊等。這14 個(gè)模塊根據(jù)實(shí)時(shí)性要求的不同,又劃分為三個(gè)任務(wù)級(jí)別。由于自動(dòng)切模塊除了控制切刀的動(dòng)作外,還負(fù)責(zé)接收計(jì)數(shù)器計(jì)數(shù)值,將其設(shè)置為任務(wù)級(jí)別最高的任務(wù)模塊,其執(zhí)行周期最短,從而將計(jì)數(shù)誤差控制到最小限度并及時(shí)控制閥的動(dòng)作。
3 結(jié)束語
具有多任務(wù)處理功能的PCC 是近年來發(fā)展起來的新一代PLC,它不僅適用于小規(guī)模的控制,更能勝任復(fù)雜的對(duì)實(shí)時(shí)性要求高的控制場(chǎng)合,而且其趨勢(shì)是系統(tǒng)的可擴(kuò)展性和對(duì)現(xiàn)場(chǎng)總線和網(wǎng)絡(luò)的支援也在不斷增強(qiáng),隨著規(guī)模的不斷擴(kuò)大,多任務(wù)處理能力越來越顯示出生命力。
-
計(jì)算機(jī)
+關(guān)注
關(guān)注
19文章
7534瀏覽量
88464 -
pcc
+關(guān)注
關(guān)注
0文章
26瀏覽量
24540 -
電氣系統(tǒng)
+關(guān)注
關(guān)注
1文章
368瀏覽量
24296
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
多任務(wù)系統(tǒng)中的堆棧使用
關(guān)于多任務(wù)處理的問題
多任務(wù)編程多任務(wù)處理是指什么
任務(wù)裸機(jī)系統(tǒng)與多任務(wù)系統(tǒng)的區(qū)別在哪
什么是多任務(wù)系統(tǒng)?FreeRTOS任務(wù)與協(xié)程簡(jiǎn)析
多任務(wù)系統(tǒng)中的堆棧使用
注塑機(jī)的PCC控制系統(tǒng)
PCC及其在自動(dòng)校直切斷機(jī)中的應(yīng)用
注塑機(jī)的PCC控制系統(tǒng)
51單片機(jī)多任務(wù)機(jī)制的實(shí)現(xiàn)策略研究

軟總線架構(gòu)在實(shí)時(shí)多任務(wù)軟件系統(tǒng)中的設(shè)計(jì)應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論