 應用于海洋搜救的DSP圖像處理識別系統設計
應用于海洋搜救的DSP圖像處理識別系統設計
引言
使用營救隊伍和設備尋找和營救海上遇難人員的活動。由國家參加的一種國際協作。世界上每年約有400艘船舶遇險,國際社會對搜救工作的重要性和道義責任極為重視并制訂了許多公約和規定。1979年4月政府間海事協商組織在漢堡會議上通過了《1979年國際海上搜尋救助公約》,從而使各國救助機構與救援的船舶有了共同遵守的行動準則和實施搜救的具體程序。當遇險船舶發出遇險信號時,無論臨近船舶還是海岸電臺,都必須按上述公約通知臨近的國家救助機構進行救助,與難船臨近的船舶應急速駛往難船施救。當難船沒有無線電示位標時,首先要按求救時的船位抵達現場并據風、流等情況,確定搜尋基點,以該點為中心,以長10海里的正方形為開始搜尋區,搜尋方式視施救船舶與裝備情況,可采用單船方形和扇形擴展搜尋,多只船平行搜尋,海、空協作搜尋等方法進行。
根據海洋搜救的性質,該系統應具備以下基本能力:
·較高的可疑目標檢測能力;
·較高的海洋背景抗干擾能力;
·具有一定的目標識別和跟蹤能力。
基于以上考慮,本文設計了由二片TMS320F2812和八片TMS320C6416T構成的圖像處理系統。
系統指標要求
·可見光視頻輸入:CCIR/EIA或PAL/NTSC視頻信號
·視頻輸出:VGA或標準視頻輸出
·視頻AD轉換精度:12bit
·視頻顯示DA轉換精度:10bit
·圖像處理幀速率:大于30Hz
·可檢測“目標”的最小象素數:3×3
系統方案
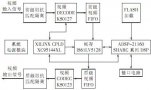
系統框圖如圖1所示。
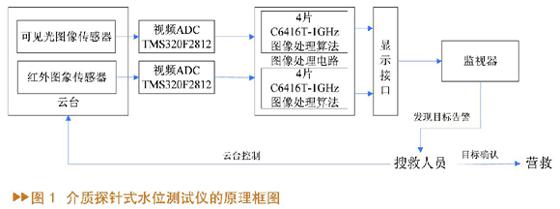
采用TMS320F2812實現視頻采集,通過XINTF接口與多片6416-HPI接口連接,實現圖像數據傳輸。各6416采取流水工作模式,通過EMIFB接口輸出處理后的圖像數據,經過顯示電路,由監視器顯示輸出圖像。
系統采用可拓展結構,可根據實際需要確定6416圖像處理單元數目。通常采用四個或八個6416圖像處理單元。
系統軟件對圖像數據進行濾波和邊緣檢測,檢測可疑目標并進行識別。
單視頻輸入時,可選擇四個或八個6416圖像處理單元構成圖像處理機 。
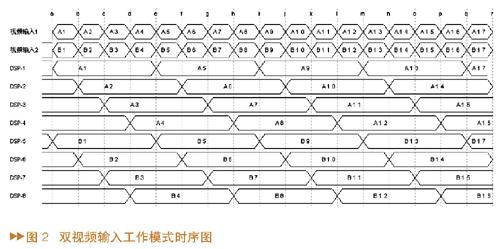
雙視頻輸入工作時序圖如圖2所示。每個視頻通道擁有四個6416圖像處理單元,分別采用流水工作模式,每片6416處理一幅圖像的最大周期為4幀,兩組的處理結果輸出給圖像顯示模塊處理。
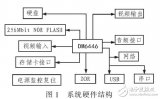
系統硬件設計
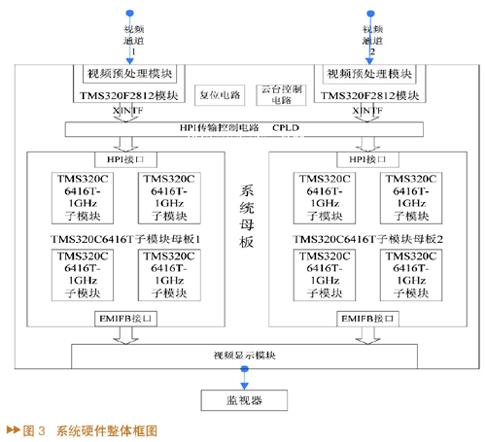
硬件系統由三部分組成:視頻采集電路、圖像處理電路及顯示電路。硬件設計總體框圖如圖3所示。
視頻采集電路
視頻采集(Video Capture)把模擬視頻轉換成數字視頻,并按數字視頻文件的格式保存下來。所謂視頻采集就是將模擬攝像機、錄像機、LD視盤機、電視機輸出的視頻信號,通過專用的模擬、數字轉換設備,轉換為二進制數字信息的過程。在視頻采集工作中,視頻采集卡是主要設備,它分為專業和家用兩個級別。專業級視頻采集卡不僅可以進行視頻采集,并且還可以實現硬件級的視頻壓縮和視頻編輯。家用級的視頻采集卡只能做到視頻采集和初步的硬件級壓縮,而更為"低端"的電視卡,雖可進行視頻的采集,但它通常都省卻了硬件級的視頻壓縮功能。
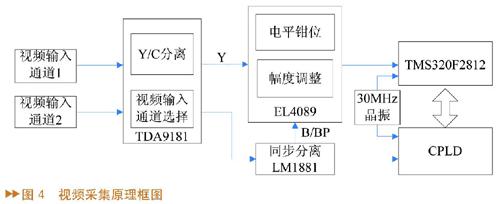
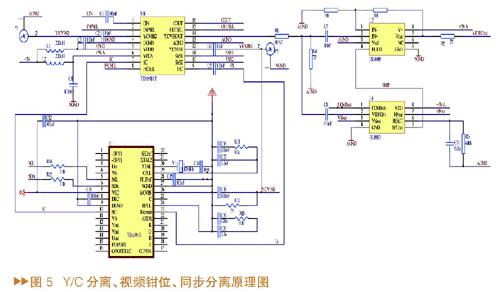
基于2812-DSP的視頻信號采集原理框圖如圖4所示,其中包括視頻預處理模塊和2812 模塊。視頻預處理模塊包括Y/C分離、電平鉗位、同步分離、幅度調整處理電路。2812-DSP片上A/D以12.5M的速度采集視頻信號,達到了極限采樣速率(采樣間隔時間為80ns)。
Y/C分離、視頻鉗位、同步分離電路原理圖見圖5。
TMS320C6416T子模塊
此模塊是本系統處理部分的核心模塊。按照通用性強、接口清晰簡捷、資源引出最大化、兼顧構建多6416系統的設計思想來設計6416子模塊,如圖6所示。通過EMIFA接口擴展了兩片4M×32bit SDRAM, 可一次讀寫64bit數據。
圖像傳輸接口設計
圖像可以定義為景物在某種介質上的再現,例如圖片、電影、傳真、電視等介質都可以使們獲得圖像信息。把圖像信息傳送到遠方或是存儲圖像信息的過程,統稱為圖像傳輸。
圖像數據通過2812-DSP-XINTF(16bit)/6416-DSP-HPI(32bit)接口傳輸,采用一片CPLD將2812-DSP兩次輸出結果拼接成32bit。優化2812-DSP-XINTF寄存器可使HPI接口傳輸速率達到最大。對XINTF寄存器的具體優化值見表1。

圖像顯示
采用VGA監視器顯示圖像處理結果。標準SVGA接口信號包括:行同步信號(VGA_Hs)、場同步信號(VGA_Vs)以及紅、綠、藍三路模擬信號。VGA所需的時序同步信號由CPLD產生,所需的模擬信號由視頻D/A轉換器ADV7123實現。顯示接口電路框圖如圖7所示。
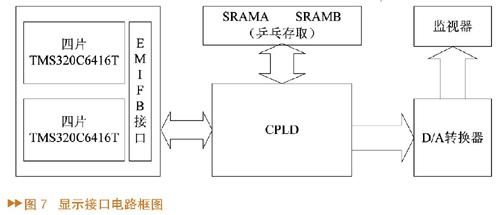
由CPLD對各個6416圖像處理單元數據輸出接口(EMIFB)總線進行總線仲裁,實現各個6416單元的圖像數據分時輸出。
兩片采用“乒乓存取”工作方式的SRAM組成了圖像數據緩沖區,每片SRAM存放一幀圖像,由CPLD控制。
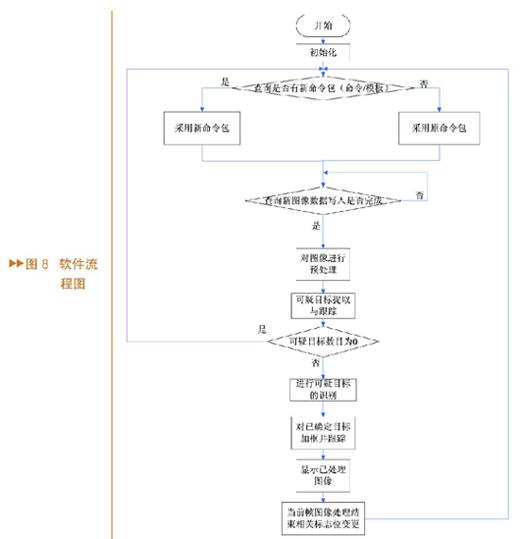
系統軟件設計
系統軟件流程圖如圖8所示。分為三個主要部分:圖像預處理、可疑目標提取及目標識別。
圖像預處理
圖像濾波(多模板復合濾波算法)
對比常用的多種濾波算法,其共同特征是:某種濾波算法只對部分噪聲有效;在較好地抑制噪聲的同時,難以保持圖像清晰度。而采用多模板復合濾波算法,可較好地解決這一問題,為邊緣提取奠定了基礎。
邊緣檢測(改進的sobel算子)
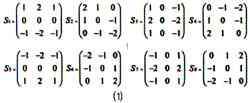
常用邊緣檢測算法受海面波紋的影響較為嚴重。相比之下,sobel算子效果較好,但也存在漏檢邊緣點的情況。本算法在傳統sobel算子兩個模板的基礎上,增加了六個模板,用下述八個模板對每個像素分別進行運算,然后取其中最大值替代該像素的值。
這種改進的sobel算子使得邊緣檢測更加準確,但處理一幀圖像的運算量較大。采用改進的sobel算子進行圖像邊緣檢測處理后,將圖像二值化。改進的sobel算子不但檢測出了全部可疑目標,并且受海浪的影響較小。
可疑目標提取與跟蹤
為減少運算數據量,采用二次標記的方法提取可疑目標:
·利用貼標簽算法進行預標記,統計出物體數目并記錄其所在位置;
·根據上位機提供的模板信息,提取可疑目標;
·進行二次標記,僅標記已提取的可疑目標;
·對提取出的可疑目標進行跟蹤。
目標識別與跟蹤
當提取的可疑目標(一般是指象素數較少的小目標)達到一定的象素數后,采用Hu不變矩特征對可疑目標進行目標識別。
對數字圖像f(x,y),p+q階矩(mpq)和中心矩(μpq)定義為
其中p和q是非負的整數。圖像的(p+q)階歸一化的中心矩定義為:
利用二階和三階歸一化的中心矩求出七個Hu不變矩組:

A(x,y)則為位置(x,y)處不變矩的相關值。取A值最大處對應的點作為匹配點。
由于不變矩描述的是圖像的統計特性,滿足對平移、伸縮、旋轉等變化的不變性,因而廣泛應用于圖像識別等領域。該算法的不足之處是計算量大。而僅僅處理局部可疑目標區域圖像數據的方法,可以大大減少數據運算量。對識別后的目標加框并跟蹤。
結論
·成功實現了用于海洋搜救的多片DSP圖像處理識別系統;
·成功實現了2812視頻數據采集;
·系統硬件的可拓展性增強了系統的通用性;
·軟件算法實際應用效果明顯。
該系統(PCB板見圖9)還可實現對搜救目標的被動測距、可見光和長波紅外圖像的雙波段圖像融合等功能。另外,系統的強大處理能力和存儲空間,使其能在數字圖像處理領域發揮更大作用。
-
dsp
+關注
關注
554文章
8059瀏覽量
349777 -
視頻
+關注
關注
6文章
1956瀏覽量
73051 -
圖像處理
+關注
關注
27文章
1299瀏覽量
56835
發布評論請先 登錄
相關推薦
用于海洋搜救的多片DSP圖像處理識別系統的實
怎么設計基于嵌入式系統的語音口令識別系統?
怎么實現基于STM32F103單片機的車牌識別圖像處理識別系統的設計?
基于DSP的虹膜識別系統設計
采用DSP的圖像處理在車牌識別中的設計應用

DSP在焊縫識別系統中的應用
基于DSP和以太網的指紋識別系統

用于海洋搜救的多DSP圖像處理識別系統
圖像處理的板形識別系統設計
以DSP為核心的紙幣識別系統設計

基于DSP的嵌入式圖像識別系統設計與實現總結






 工商網監
工商網監
評論