") 通信模塊在自動(dòng)攤鋪機(jī)中分布式控制系統(tǒng)中的應(yīng)用
通信模塊在自動(dòng)攤鋪機(jī)中分布式控制系統(tǒng)中的應(yīng)用
1.引言
瀝青混凝土攤鋪機(jī)是用于鋪筑瀝青混凝土路面的機(jī)械,是路面機(jī)械的主要機(jī)種之一。攤鋪機(jī)中自動(dòng)找平系統(tǒng)的控制精度反映到路面即是該攤鋪機(jī)的攤鋪平整度。在通常的液壓伺服控制方案中,自動(dòng)找平的過(guò)程如下:由檢測(cè)傳感器測(cè)出基層面實(shí)際高度并與標(biāo)準(zhǔn)高度進(jìn)行比較,當(dāng)偏差值達(dá)到一定的程度時(shí),認(rèn)為需要加以調(diào)整,這時(shí)由控制器發(fā)出指令,通過(guò)液壓泵驅(qū)動(dòng)找平液壓缸使?fàn)恳蟊郛a(chǎn)生一定量的位移;牽引點(diǎn)位置改變引起熨平板相應(yīng)垂直運(yùn)動(dòng),從而使鋪層產(chǎn)生變化,彌補(bǔ)路面波動(dòng),使鋪后表面均勻一致,實(shí)現(xiàn)所要求的路面平整度。瀝青混凝土攤鋪機(jī)由于其作業(yè)環(huán)境十分惡劣,環(huán)境溫度高,溫度變化大,灰塵多,故檢測(cè)路面高度傳感器的選取非常重要.目前在攤鋪機(jī)自動(dòng)找平系統(tǒng)中常采用的有以下幾種傳感器:角位移式傳感器、超聲波傳感器、光學(xué)傳感器。
2.攤鋪機(jī)工作原理
瀝青混凝土道路的攤鋪過(guò)程是:作業(yè)時(shí),攤鋪機(jī)的前推輥?lái)斖浦d料自卸汽車后輪前進(jìn),并接受瀝青混合料。卸于料斗內(nèi)的瀝青混合料,由斗底左右兩個(gè)獨(dú)立驅(qū)動(dòng)的刮板輸送器送至螺旋攤鋪室,送料量由后斗壁左右兩閘門分別控制。螺旋攤鋪器有左右兩螺旋,同時(shí)將料向左右兩側(cè)均勻攤鋪,但亦能左右各自獨(dú)立驅(qū)動(dòng)。隨著攤鋪機(jī)的向前移動(dòng),振實(shí)、熨平部分按一定的寬度、厚度和拱度對(duì)鋪層進(jìn)行初步振實(shí)和整平。熨平板內(nèi)裝有加熱裝置,以便在寒冷季節(jié)或在作業(yè)開(kāi)始前對(duì)板底進(jìn)行加熱,防止瀝青混合料的粘附。由于熨平板有浮動(dòng)特性,故能通過(guò)厚度調(diào)節(jié)器來(lái)改變熨平板底面相對(duì)于地面的仰角,以調(diào)節(jié)鋪層厚度。
3.通信模塊的網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)
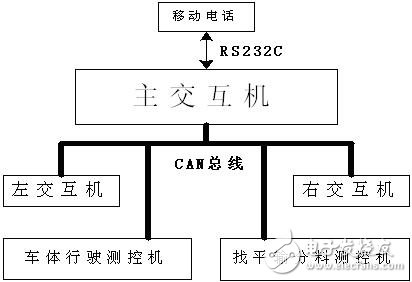
圖1 通信模塊的網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)
自動(dòng)攤鋪機(jī)系統(tǒng)既龐大、又復(fù)雜。包括車體的方向、速度控制,輸分料控制,大臂、熨平板、找平控制,發(fā)動(dòng)機(jī)的起、停控制以及各種狀態(tài)參數(shù)的測(cè)量、顯示和故障報(bào)警。為了提高系統(tǒng)的可靠性,采用了集散型計(jì)算機(jī)體系結(jié)構(gòu),實(shí)現(xiàn)了集中管理以及功能和危險(xiǎn)的分散。所有這些子控制系統(tǒng)都在不同的單片機(jī)上完成,而這些子系統(tǒng)之間的參數(shù)傳輸則由主交互機(jī)進(jìn)行協(xié)調(diào)。顯而易見(jiàn),攤鋪機(jī)能否在工作環(huán)境相當(dāng)惡劣的條件下正常、可靠、穩(wěn)定地工作,很大程度上取決于各個(gè)單片機(jī)于系統(tǒng)能否進(jìn)行可靠、穩(wěn)定的通信。根據(jù)項(xiàng)目的要求,對(duì)人機(jī)交互系統(tǒng)和測(cè)控機(jī)系統(tǒng)的各種輸入/輸出量的關(guān)系進(jìn)行了深入細(xì)致的研究和測(cè)量,制定了如圖l所示的網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)。
在圖1中,主交互機(jī)與左交互機(jī)、右交互機(jī)、車體行駛測(cè)控機(jī)、找平輸分料測(cè)控機(jī)利用CAN總線進(jìn)行通信;而主交互機(jī)與移動(dòng)電話則利用RS232C進(jìn)行串行通信。
4.通信模板的硬件設(shè)計(jì)
本系統(tǒng)中采用億恒公司的16位CMOS單片機(jī)系列的C164作為主控制器。億恒C164是單片機(jī)是一款非常優(yōu)秀的單片機(jī),特別是它的16位單片機(jī),高性能CPU 結(jié)合功能豐富的外設(shè),每秒可執(zhí)行1250萬(wàn)條指令,在CPU時(shí)鐘頻率20MHz時(shí)具有下面的性能特點(diǎn):
(1)帶有4級(jí)流水線高性能16位CPU
80ns最小指令循環(huán)時(shí)間,大多數(shù)指令僅需1個(gè)循環(huán),即兩個(gè)CPU循環(huán);16*16位乘法需400ns(20個(gè)CPU循環(huán)),32位除16位需800ns(40個(gè)CPU循環(huán))。處理能力達(dá)到10MIPS.
(2)集成在片存儲(chǔ)器
64KB在片可編程FLASH;2KB內(nèi)部RAM,用于變量存儲(chǔ)器池、系統(tǒng)堆棧和代碼;2KB在片高速RAM,用于變量、用戶堆棧和代碼;4KB在片數(shù)據(jù)EEPROM,用于non-volatile變量。
(3)外部總線接口
獨(dú)立或復(fù)用總線配置;段分配和片選信號(hào)產(chǎn)生;8位或16位數(shù)據(jù)總線。
(4)16個(gè)優(yōu)先級(jí)中斷系統(tǒng)
可達(dá)33個(gè)中斷節(jié)點(diǎn)帶有獨(dú)立的中斷矢量;在內(nèi)部程序執(zhí)行時(shí),240ns/400ns中斷等待時(shí)間;快速外部中斷。
(5)智能在片外設(shè)子系統(tǒng)
8通道10位A/D轉(zhuǎn)換器,帶有可編程轉(zhuǎn)換時(shí)間(最小為7.76us;5個(gè)定時(shí)/計(jì)數(shù)器;同步/異步串行通道;帶有15個(gè)信息體的CAN摸量;可編程時(shí)間間隔的看門狗定時(shí)器;實(shí)時(shí)時(shí)鐘;用于系統(tǒng)初始化的程序引導(dǎo)裝載器。
(6)59個(gè)I/O引腳
輸入模式具有三態(tài);具有位尋址功能。
通信模塊的硬件電路如圖2所示。
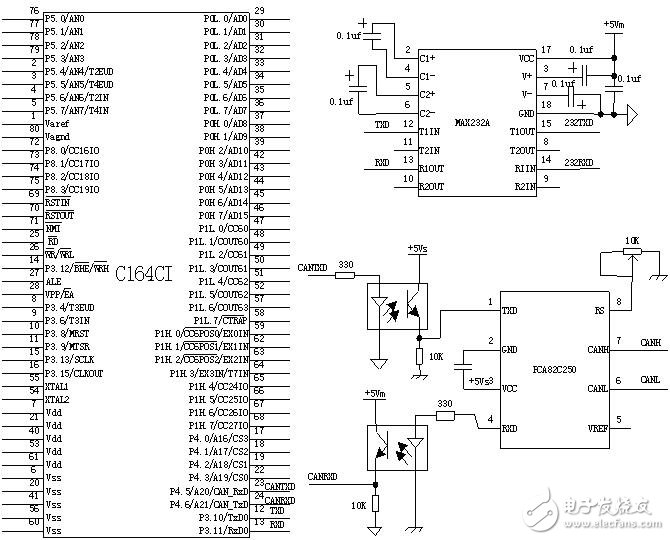
圖2 通信模塊的硬件電路圖
通信模塊帶有CANBUS、RS232C各一路,可獨(dú)立進(jìn)行CAN總線通信和RS232C串行通信。RS232C通信硬件電路由C164片內(nèi)異步串行口、光耦、MAX232A和傳輸線構(gòu)成。CAN通信由C164片內(nèi)CAN控制器、光耦、CAN收發(fā)器PAC82C250和傳輸線構(gòu)成。
CAN收發(fā)器PAC82C250與C164CI的接口均帶有光電隔離,隔離前后采用兩套電源:
(1)系統(tǒng)電源:+Vs(+5V), Gs ;
(2)機(jī)器電源:+Vm(+5V), Gm.
5.RS232C通信軟件設(shè)計(jì)
5.1 C164CI的異步串口
C164CI的異步串行口ASC0提供了與其它系統(tǒng)串行通信端口,它的特點(diǎn)是:自帶波特率發(fā)生器的異步串口;異步模式,最大625Kbaud傳送速率;全雙工位;可編程特點(diǎn)(1或2停止位,7、8或9數(shù)據(jù)位);在數(shù)據(jù)發(fā)送時(shí)產(chǎn)生校驗(yàn)或喚醒位;奇或偶校驗(yàn)位;錯(cuò)誤檢測(cè)等。
5.2 串行口通信編程
串行口主要用于移動(dòng)電話和主交互機(jī)之間進(jìn)行通信。串行通信的實(shí)現(xiàn)主要是通過(guò)對(duì)串口控制寄存器進(jìn)行配置實(shí)現(xiàn)初始化。下面是這一過(guò)程的實(shí)現(xiàn)步驟:
1. 串口控制寄存器初始化;
2. 定義波特率;
3. 定義中斷;
4. 定義引腳的特殊功能;
5. 系統(tǒng)啟動(dòng)。
下面為實(shí)現(xiàn)串口的通信程序:
#include
unsigned int a;
interrupt(0x2B) void S0RINT(void) //接收中斷服務(wù)子程序
{
a=S0RBUF; //將接收數(shù)據(jù)保存
}
void putchar(unsigned char tdata) //串行發(fā)送程序
{
while(!S0TBIR){;} //等待發(fā)送緩沖區(qū)清空
S0TBIR=0; //復(fù)位發(fā)送緩沖區(qū)中斷請(qǐng)求標(biāo)志
S0TBUF=tdata; //裝載發(fā)送緩沖寄存器
}
void ASC_vInit(void) //串行通信初始化
{
S0CON=0x8011; //定義控制寄存器:SOR=1;SOREM=1;串行方式1
S0BG=0x0040; //定義波特率9 600Bd
S0RIC=0x0062; //定義接收中斷控制寄存器
S0TBIC=0x0080; //定義發(fā)送緩沖控制寄存器
P3 |=0x0400; //定義P3.10引腳為輸出鎖存(TXD0)
DP3 |=0x0400; //定義P3.10方向控制(TXD0為輸出)
Dp3 &=0xF7FF; //定義P3.11方向控制(RXD0為輸入)
IEN=1; //開(kāi)中斷
}
void main(void)
{
……;
ASC_vInit(); //串口初始化
putchar('……'); //串行發(fā)送
……;
}
6.CAN總線通信軟件設(shè)計(jì)
CAN 是Controller Area Network 的縮寫(以下稱為CAN),是ISO國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。在當(dāng)前的汽車產(chǎn)業(yè)中,出于對(duì)安全性、舒適性、方便性、低公害、低成本的要求,各種各樣的電子控制系統(tǒng)被開(kāi)發(fā)了出來(lái)。由于這些系統(tǒng)之間通信所用的數(shù)據(jù)類型及對(duì)可靠性的要求不盡相同,由多條總線構(gòu)成的情況很多,線束的數(shù)量也隨之增加。為適應(yīng)"減少線束的數(shù)量"、"通過(guò)多個(gè)LAN,進(jìn)行大量數(shù)據(jù)的高速通信"的需要,1986 年德國(guó)電氣商博世公司開(kāi)發(fā)出面向汽車的CAN 通信協(xié)議。此后,CAN 通過(guò)ISO11898 及ISO11519 進(jìn)行了標(biāo)準(zhǔn)化,現(xiàn)在在歐洲已是汽車網(wǎng)絡(luò)的標(biāo)準(zhǔn)協(xié)議。
現(xiàn)在,CAN 的高性能和可靠性已被認(rèn)同,并被廣泛地應(yīng)用于工業(yè)自動(dòng)化、船舶、醫(yī)療設(shè)備、工業(yè)設(shè)備等方面。現(xiàn)場(chǎng)總線是當(dāng)今自動(dòng)化領(lǐng)域技術(shù)發(fā)展的熱點(diǎn)之一,被譽(yù)為自動(dòng)化領(lǐng)域的計(jì)算機(jī)局域網(wǎng)。它的出現(xiàn)為分布式控制系統(tǒng)實(shí)現(xiàn)各節(jié)點(diǎn)之間實(shí)時(shí)、可靠的數(shù)據(jù)通信提供了強(qiáng)有力的技術(shù)支持。
6.1 C164CI的CAN模塊概述
C164CI的CAN模塊特點(diǎn)如下:
(1)遵循CAN V2.0B規(guī)定(符號(hào)標(biāo)準(zhǔn)和擴(kuò)展功能)。
(2)最大CAN通信速率為1MB/S.
(3)完全的CAN裝置:
l 15個(gè)信息體,帶有自己的識(shí)別器和狀態(tài)控制位;
l 每個(gè)信息體可以定義為發(fā)送或接收。
(4)通過(guò)在片內(nèi)部XBUS(16位獨(dú)立方式)與主CPU相連(C166-內(nèi)核)。
(5)接收濾波器用可編程屏蔽寄存器:
l 全域屏蔽輸入信息體(全CAN功能);
l 信息體15有附加屏蔽(基本CAN功能);
l 靈活的中斷事件控制;
l 帶有兩個(gè)接收緩沖器;
l 用自己的全域屏蔽寄存器進(jìn)行接接收濾波。
6.2 CAN總線通信軟件設(shè)計(jì)
自動(dòng)攤鋪機(jī)系統(tǒng)CAN總線通信軟件設(shè)計(jì)的任務(wù)是:在選定通信規(guī)程CAN2.0B以后,規(guī)定各計(jì)算機(jī)傳送數(shù)據(jù)的格式和約定;協(xié)調(diào)各計(jì)算機(jī)之間的通信;統(tǒng)一考慮通信中的可靠性措施。
6.2.1 數(shù)據(jù)發(fā)送模式
由于要傳送數(shù)據(jù)的重要程度、傳送周期不同,在本系統(tǒng)的通信中采用兩種不同的數(shù)據(jù)發(fā)送模式:
(1)發(fā)送模式0:即發(fā)送一次,不檢測(cè)接收是否正確,發(fā)送結(jié)束返回。接收方接收到此類數(shù)據(jù)包后,不必發(fā)送應(yīng)答信息包。該數(shù)據(jù)包的特點(diǎn)是:按照一定周期定時(shí)發(fā)送,用于主操作面板上的狀態(tài)顯示,所以偶爾的傳送失敗不會(huì)影響系統(tǒng)的正常運(yùn)行與操作。
(2) 發(fā)送模式1:即一定要將數(shù)據(jù)包正確發(fā)送給接收方。采用重發(fā)機(jī)制,等待接收方應(yīng)答,若沒(méi)有接收到應(yīng)答則重發(fā)。5次發(fā)送均失敗,則返回FALSE,由發(fā)送方做出相應(yīng)的處理動(dòng)作,如報(bào)警、停機(jī)等;成功則返回TRUE.該數(shù)據(jù)包的特點(diǎn)是:由相應(yīng)事件觸發(fā)發(fā)送,如果傳送失敗,將影響系統(tǒng)的正常運(yùn)行。
6.2.2 數(shù)據(jù)發(fā)送模式
對(duì)于自動(dòng)攤鋪機(jī)系統(tǒng)來(lái)說(shuō),其CAN 網(wǎng)絡(luò)中節(jié)點(diǎn)數(shù)量較少,而每種數(shù)據(jù)包只需要一部分節(jié)點(diǎn)來(lái)接收,因此在通信設(shè)計(jì)中利用數(shù)據(jù)幀標(biāo)識(shí)符來(lái)實(shí)現(xiàn)定址組播。為避免接收不必要的數(shù)據(jù)包,對(duì)接收節(jié)點(diǎn)按位編址,每個(gè)節(jié)點(diǎn)對(duì)應(yīng)驗(yàn)收濾波中的一位。若一個(gè)報(bào)文標(biāo)識(shí)符高8位中對(duì)應(yīng)位為1,則接收;否則忽略。因此只要在發(fā)送節(jié)點(diǎn)根據(jù)數(shù)據(jù)包內(nèi)容設(shè)置合適的報(bào)文標(biāo)識(shí)符,數(shù)據(jù)包即可被相關(guān)節(jié)點(diǎn)正確接收,而被無(wú)關(guān)節(jié)點(diǎn)忽略。
6.2.3 校驗(yàn)
在CAN 結(jié)構(gòu)的MAC層中已經(jīng)實(shí)現(xiàn)了循環(huán)冗余碼〔CRC〕校驗(yàn)。但自動(dòng)攤鋪機(jī)工作環(huán)境惡劣,工作條件復(fù)雜,為了系統(tǒng)通信的可靠性,在控制程序級(jí)的通信中也進(jìn)行校驗(yàn)。為減輕系統(tǒng)負(fù)擔(dān)及降低程序復(fù)雜性,控制程序級(jí)的校驗(yàn)采用了比較簡(jiǎn)單的求和取模校驗(yàn)方式,每個(gè)數(shù)據(jù)幀的最后一個(gè)數(shù)據(jù)字節(jié)作為校驗(yàn)和,其值是之前所有數(shù)據(jù)字節(jié)求和后對(duì)256取模的值。各節(jié)點(diǎn)的接收接口中以相同方法計(jì)算校驗(yàn)和,若校驗(yàn)正確則將數(shù)據(jù)包壓入接收隊(duì)列,否則拋棄該包。
6.2.4 數(shù)據(jù)包格式及內(nèi)容

其中:L取值為2—8:采用CAN2.0B標(biāo)準(zhǔn),使用29位標(biāo)識(shí)符。
ID28—ID21:確定此幀的接收節(jié)點(diǎn),每位代表1個(gè)節(jié)點(diǎn),可以廣播。
ID20—IDl7:此幀的順序號(hào),每發(fā)一個(gè)幀增1,用于區(qū)分不同數(shù)據(jù)幀與重發(fā)數(shù)據(jù)幀。
IDl6:應(yīng)答標(biāo)志位:為1表示此幀需要應(yīng)答,為0表示此幀不需應(yīng)答。
IDl5—IDl3:指定此幀的發(fā)送節(jié)點(diǎn),0—3分別代表左交互機(jī)、右交互機(jī)、車體行駛測(cè)控機(jī)和找平輸分料測(cè)控機(jī)。
ID12—ID0:無(wú)意義。
6.3 CAN總線通信編程
CAN總線通信編程是一個(gè)比較煩瑣的事情,主要是涉及諸多的CAN寄存器,但只要掌握其規(guī)律和技術(shù)關(guān)鍵,就會(huì)變得容易起來(lái)。下面是CAN總線通信編程的實(shí)現(xiàn)步驟:
(1)CAN模量初始化;
(2)定義每一個(gè)信息體;
(3)裝載信息體數(shù)據(jù)(僅針對(duì)發(fā)送信息體);
(4)接收信息體接收數(shù)據(jù);
(5)發(fā)送一個(gè)信息體;
(6)檢查一個(gè)信息體;
(7)檢查是否關(guān)閉CAN總線。
為便于進(jìn)行模塊化編程,將CAN通信功能封裝成一個(gè)個(gè)子程序,并且生成一個(gè)專用的程序庫(kù),供不同的程序員調(diào)用,這樣就提高了編程效率,并易于功能擴(kuò)展。下面給出其中的兩個(gè)子程序。
下面為發(fā)送一個(gè)信息體的CAN通信程序:
#include //C164寄存器定義
#include //CAN控制寄存器定義
void send_mo_16x(unsigned char a) //發(fā)送信息體“a”(1..14)
{
if((a<15)&&(a))*msgctrl_ptr_16x[a]=0xefff; //置位TXRQ
}
下面為檢查是否關(guān)閉CAN總線的CAN通信程序:
#include //CAN控制寄存器定義
unsigned char check_busoff_16x(void) //檢查總線是否關(guān)閉,并在必要時(shí)恢復(fù)
{
unsigned char busoff_var=0;
if(SR&0x80) //如果BOFF=1
{
busoff_var=1;
CR=CR&0xfe; //恢復(fù)關(guān)閉的總線(清零INIT)
}
}
7.結(jié)論
由于攤鋪機(jī)的功能繁多,運(yùn)作復(fù)雜,工作環(huán)境十分惡劣,因此控制系統(tǒng)的工作可靠性問(wèn)題就是自動(dòng)攤鋪機(jī)設(shè)計(jì)的關(guān)鍵。在本系統(tǒng)中,利用RS232C 實(shí)現(xiàn)了主交互機(jī)與移動(dòng)電話之間的串行通信;采用帶CAN總線的單片機(jī)完成不同模塊各自的功能,又通過(guò)CAN總線傳送數(shù)據(jù)或命令,實(shí)現(xiàn)了功能分散又集中監(jiān)視,危險(xiǎn)分散。因此,很適合于自動(dòng)攤鋪機(jī)中分布式控制系統(tǒng)的實(shí)現(xiàn)。現(xiàn)場(chǎng)實(shí)驗(yàn)結(jié)果表明:該通信模塊具有良好的可靠性、穩(wěn)定性和安全性。
-
拓?fù)?/span>
+關(guān)注
關(guān)注
4文章
341瀏覽量
29646 -
計(jì)算機(jī)
+關(guān)注
關(guān)注
19文章
7530瀏覽量
88417 -
通信模塊
+關(guān)注
關(guān)注
2文章
150瀏覽量
33116
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于虛擬儀器的城市景觀照明分布式控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
分布式控制系統(tǒng)
分布式控制系統(tǒng)的組成是什么?
分布式控制系統(tǒng)有哪些功能和應(yīng)用
請(qǐng)問(wèn)怎樣去設(shè)計(jì)一種車門分布式控制系統(tǒng)?
Modbus通信協(xié)議在分布式控制系統(tǒng)中的應(yīng)用
CAN總線在車輛分布式控制系統(tǒng)中的應(yīng)用
分布式控制系統(tǒng)(DCS)問(wèn)答
工業(yè)機(jī)器人分布式控制系統(tǒng)實(shí)例

新型的高壓變頻分布式控制系統(tǒng)
分布式控制系統(tǒng)的介紹

可視化分布式控制系統(tǒng)

分布式控制系統(tǒng)的基礎(chǔ)架構(gòu)和原理。






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論